También podría gustarte
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- 0001Documento84 páginas0001chakkras2011Aún no hay calificaciones
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Ship Classification and TypesDocumento15 páginasShip Classification and TypesPandu Prayoga HoppusAún no hay calificaciones
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Williams Industrial Hydraulics Basic Hydraulic Principles and Troubleshooting PDFDocumento20 páginasWilliams Industrial Hydraulics Basic Hydraulic Principles and Troubleshooting PDFTEPU MSOSA100% (4)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- Design ProcessDocumento54 páginasDesign Processteoteoteo1988100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Quick Strip TheoryDocumento11 páginasQuick Strip TheoryPopoo KyoAún no hay calificaciones
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Krcum971Documento11 páginasKrcum971alexAún no hay calificaciones
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Calculation For Hull Strength Construction in Offshore Structures PDFDocumento10 páginasCalculation For Hull Strength Construction in Offshore Structures PDFcxb07164Aún no hay calificaciones
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- 2classificationsocieties 111210064719 Phpapp01Documento12 páginas2classificationsocieties 111210064719 Phpapp01Samir Alshaar100% (1)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- Shear Force and Bending Moment Diagrams With ExamplesDocumento12 páginasShear Force and Bending Moment Diagrams With ExamplesHamza ShamsAún no hay calificaciones
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- Torque Equilibruim Problem - Physics Forums - The Fusion of Science and CommunityDocumento3 páginasTorque Equilibruim Problem - Physics Forums - The Fusion of Science and Communityrammech85Aún no hay calificaciones
- ch3 131029190336 Phpapp02Documento27 páginasch3 131029190336 Phpapp02rammech85Aún no hay calificaciones
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Manual 813 298 mc0Documento81 páginasManual 813 298 mc0rammech85Aún no hay calificaciones
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- 4 - Manikantan - Laboratory Measurement of Cutter Suction Dredged Sediment VolumeDocumento12 páginas4 - Manikantan - Laboratory Measurement of Cutter Suction Dredged Sediment Volumerammech85Aún no hay calificaciones
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Deck Branch Training - Part 2Documento21 páginasDeck Branch Training - Part 2rammech85Aún no hay calificaciones
- Brochure Damen Dredging PDFDocumento34 páginasBrochure Damen Dredging PDFCarlos Marcelo CostaAún no hay calificaciones
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- 1 7VariousTypesofVesselsDocumento9 páginas1 7VariousTypesofVesselsrammech85Aún no hay calificaciones
- Chapter3 150323091230 Conversion Gate01Documento18 páginasChapter3 150323091230 Conversion Gate01rammech85Aún no hay calificaciones
- Bending Stresses in BeamDocumento29 páginasBending Stresses in BeamilhammkaAún no hay calificaciones
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- Deck Branch Training - Part 2Documento21 páginasDeck Branch Training - Part 2rammech85Aún no hay calificaciones
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Load CalcDocumento69 páginasLoad Calcmyusuf_engineerAún no hay calificaciones
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
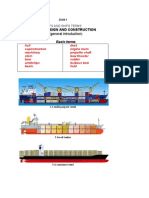
- Ship Design and ConstructionDocumento12 páginasShip Design and ConstructiongamronAún no hay calificaciones
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- 5.10.4 Marshall Mix Design Calc 03.24Documento14 páginas5.10.4 Marshall Mix Design Calc 03.24Seble GetachewAún no hay calificaciones
- Ships Dimension Types of ShipsDocumento64 páginasShips Dimension Types of ShipsDheerajKaushalAún no hay calificaciones
- Types of Ships: Buoyant Watercraft Boats Cargo Seas Rivers Goods FishingDocumento13 páginasTypes of Ships: Buoyant Watercraft Boats Cargo Seas Rivers Goods Fishingrammech85Aún no hay calificaciones
- Pipe SizingDocumento32 páginasPipe SizingRengga AndryastamaAún no hay calificaciones
- Ship'S TypesDocumento22 páginasShip'S Typesrammech85Aún no hay calificaciones
- Irrigation Pipe DesignDocumento53 páginasIrrigation Pipe DesignVinod100% (11)
- Ch11 SlopeDocumento20 páginasCh11 SlopehanumabendadiAún no hay calificaciones
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- Giao Trinh Doc 3 Chinh Thuc Ban Cuoi VstepDocumento152 páginasGiao Trinh Doc 3 Chinh Thuc Ban Cuoi VstepNgọc Hân TrầnAún no hay calificaciones
- Dredging, Clamshell and DraglineDocumento10 páginasDredging, Clamshell and DraglineAnxia Jane JimenezAún no hay calificaciones
- Chapter 5 Hill Roads: Necessities of Hill Road Design and Construction Problems of Hill RoadsDocumento21 páginasChapter 5 Hill Roads: Necessities of Hill Road Design and Construction Problems of Hill RoadsSandesh Khadka100% (1)
- Lijst Belgische Zeeschepen - 4 Mei 2021Documento42 páginasLijst Belgische Zeeschepen - 4 Mei 2021Sami Ben SlimaneAún no hay calificaciones
- A Wide Range of High Quality Pumps and Pumpsets Available FromDocumento2 páginasA Wide Range of High Quality Pumps and Pumpsets Available FromYousef AlipourAún no hay calificaciones
- Robotic Underwater Inspection and Construction Services Using A Rov-Remoted Operated VehicleDocumento10 páginasRobotic Underwater Inspection and Construction Services Using A Rov-Remoted Operated VehicleMarcelo ProtzAún no hay calificaciones
- MaKur M.Documento8 páginasMaKur M.marekmanyielAún no hay calificaciones
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2102)
- Flump 2009Documento20 páginasFlump 2009Fernando GarcíaAún no hay calificaciones
- San Juan Harbor 103 Final 051021 CompiledDocumento142 páginasSan Juan Harbor 103 Final 051021 CompiledCORALationsAún no hay calificaciones
- L7 BQS652 Plants & Equipment MAY 2023Documento65 páginasL7 BQS652 Plants & Equipment MAY 2023NURSASHA FAREESHA MARZUKIAún no hay calificaciones
- Dredging Seminar Course Material Example 04equipmentDocumento27 páginasDredging Seminar Course Material Example 04equipmentJanCarlosAún no hay calificaciones
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Executive Summary TSHD April 2013Documento2 páginasExecutive Summary TSHD April 2013Madalin MihaiAún no hay calificaciones
- Case Study 2 Mine Environmental MGTDocumento14 páginasCase Study 2 Mine Environmental MGTJose Mari DichosonAún no hay calificaciones
- Dredging Guidelines For Major Ports 2021Documento79 páginasDredging Guidelines For Major Ports 2021Rahul dateAún no hay calificaciones
- European Maritime Safety AgencyDocumento118 páginasEuropean Maritime Safety AgencyGraciela GonzálezAún no hay calificaciones
- Penangangan Sedimentasi PLTA BakaruDocumento14 páginasPenangangan Sedimentasi PLTA BakaruredzzaamaliaAún no hay calificaciones
- Port Development: Port Policy and Trend of Maritime Logistics 2.1.1 Port Policy DirectionDocumento268 páginasPort Development: Port Policy and Trend of Maritime Logistics 2.1.1 Port Policy Directionrk100% (1)
- Method Breakwater - Rock Placement PDFDocumento162 páginasMethod Breakwater - Rock Placement PDFtsuakAún no hay calificaciones
- Metode Pelaksanaan Dredging and Embankment Waduk SahariDocumento44 páginasMetode Pelaksanaan Dredging and Embankment Waduk Saharizakkyku100% (2)
- DAMEN Corporate Brochure English 09 2014 PDFDocumento50 páginasDAMEN Corporate Brochure English 09 2014 PDFMark AzzopardiAún no hay calificaciones
- Desalination Plant ConstructionDocumento104 páginasDesalination Plant Constructionadalcayde2514Aún no hay calificaciones
- 013 Emr en - 6Documento82 páginas013 Emr en - 6harendraAún no hay calificaciones
- Backhoe Dredger - Capability Sheet 02 PDFDocumento2 páginasBackhoe Dredger - Capability Sheet 02 PDFHorea Cordunianu100% (1)
- OffshoreDocumento16 páginasOffshoreKahl YeongAún no hay calificaciones
- Dredging Environmental Impact Assessment PDFDocumento56 páginasDredging Environmental Impact Assessment PDFhazem hediaAún no hay calificaciones
- Dredging OperationsDocumento46 páginasDredging OperationsdimkolisAún no hay calificaciones
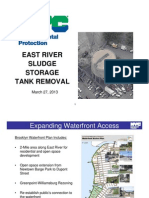
- Removal of DEP Sludge Tank Presentation 3-27-13Documento17 páginasRemoval of DEP Sludge Tank Presentation 3-27-13wholmes5924Aún no hay calificaciones
- Final Arbitral AwardDocumento67 páginasFinal Arbitral AwardMarie Dominique LavalleAún no hay calificaciones
- English Andal Amdal 2010 Part 1Documento142 páginasEnglish Andal Amdal 2010 Part 1andriyani_wise7588100% (1)
- IHC CatalogueDocumento11 páginasIHC CataloguebregaingAún no hay calificaciones
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterDe EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterAún no hay calificaciones
- A Practical Handbook for Drilling Fluids ProcessingDe EverandA Practical Handbook for Drilling Fluids ProcessingAún no hay calificaciones
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesDe EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesCalificación: 4.5 de 5 estrellas4.5/5 (21)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentDe EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentCalificación: 4.5 de 5 estrellas4.5/5 (21)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialDe EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialAún no hay calificaciones
- Shorting the Grid: The Hidden Fragility of Our Electric GridDe EverandShorting the Grid: The Hidden Fragility of Our Electric GridCalificación: 4.5 de 5 estrellas4.5/5 (2)