También podría gustarte
- CompTIA A+ Certification AcronymsDocumento6 páginasCompTIA A+ Certification Acronymse/izabeth powe//75% (4)
- Agile Planning and Portfolio Management With Azure BoardsDocumento46 páginasAgile Planning and Portfolio Management With Azure Boardssairam smartAún no hay calificaciones
- Real Gains Recipe BookDocumento20 páginasReal Gains Recipe BookOmar EljamAún no hay calificaciones
- Bourret ScratchProgrammingDocumento43 páginasBourret ScratchProgrammingjosef100% (1)
- A Step by Step Guide To EPANET SimulationsDocumento23 páginasA Step by Step Guide To EPANET Simulations17018 Md. Shahariar KabirAún no hay calificaciones
- Autodesk Inventor - Using The Content Center PT 1Documento11 páginasAutodesk Inventor - Using The Content Center PT 1Ndianabasi UdonkangAún no hay calificaciones
- Practice Questions for UiPath Certified RPA Associate Case BasedDe EverandPractice Questions for UiPath Certified RPA Associate Case BasedAún no hay calificaciones
- An Introduction To Programming With Scratch: Ronald BourretDocumento43 páginasAn Introduction To Programming With Scratch: Ronald BourretHazem Osman 2512Aún no hay calificaciones
- 5 Axis Intro Lesson 1Documento44 páginas5 Axis Intro Lesson 1MAún no hay calificaciones
- Robotics Practical FileDocumento131 páginasRobotics Practical FileRAMAKANT RANAAún no hay calificaciones
- Astagah Iyo DiDocumento94 páginasAstagah Iyo DiSpi Ishak Dorkneversaydie100% (1)
- Computer Science NotesDocumento57 páginasComputer Science NotesAthul TomyAún no hay calificaciones
- Total Process Engineering Design ManualDocumento312 páginasTotal Process Engineering Design ManualMorteza Dianatfar100% (4)
- Powermill 3axisDocumento13 páginasPowermill 3axisAhmed Abdel Moneam Hassanin100% (2)
- Impact of Cellphone On SocietyDocumento31 páginasImpact of Cellphone On SocietyRocky AhmedAún no hay calificaciones
- Mapinfo Beginners' ManualDocumento47 páginasMapinfo Beginners' ManualSharif U Islam Sabuj78% (9)
- Etappi 2 MateriaaliDocumento42 páginasEtappi 2 MateriaaliMorteza DianatfarAún no hay calificaciones
- GibbsCAM Tutorial 03Documento20 páginasGibbsCAM Tutorial 03rodrigodalvit100% (1)
- Getting Started With Quick Test Professional (QTP) And Descriptive ProgrammingDe EverandGetting Started With Quick Test Professional (QTP) And Descriptive ProgrammingCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Forms Maestro DetalleDocumento100 páginasForms Maestro DetallemickAún no hay calificaciones
- Industrie 4.0 in Practice 2016Documento58 páginasIndustrie 4.0 in Practice 2016Carol100% (5)
- Cisco ACI + Nutanix Integration - Best Practices PDFDocumento34 páginasCisco ACI + Nutanix Integration - Best Practices PDFReuben ThomasAún no hay calificaciones
- Spaceclaim Add-In Style Guide: February 2010Documento18 páginasSpaceclaim Add-In Style Guide: February 2010Janos KovacsAún no hay calificaciones
- Creating A MasterDocumento100 páginasCreating A MasterFarhan AshrafAún no hay calificaciones
- Picking A Tool: Mount The Tool Bodyside - Taskactions - Catprocess Creating Robot TasksDocumento1 páginaPicking A Tool: Mount The Tool Bodyside - Taskactions - Catprocess Creating Robot TasksMarcelo NogueiraAún no hay calificaciones
- Rpa Super ImpDocumento32 páginasRpa Super ImpthedAún no hay calificaciones
- Universiti Teknikal Malaysia Melaka Fakulti Kejuruteraan PembuatanDocumento13 páginasUniversiti Teknikal Malaysia Melaka Fakulti Kejuruteraan PembuatanDul Gemuk Telo BongkengAún no hay calificaciones
- IPOLiS NW Design Tool UserGuideDocumento33 páginasIPOLiS NW Design Tool UserGuideQuyềnTrầnAún no hay calificaciones
- ABAP Report Wizard - ReadMeDocumento14 páginasABAP Report Wizard - ReadMeАнтон БрыковAún no hay calificaciones
- Fabrication Process Organizer: 1. Purpose and DescriptionDocumento3 páginasFabrication Process Organizer: 1. Purpose and DescriptionNico InfanteAún no hay calificaciones
- Fabrication Process Organizer: 1. Purpose and DescriptionDocumento3 páginasFabrication Process Organizer: 1. Purpose and DescriptionNico InfanteAún no hay calificaciones
- LFS Tutorial 29-01-2010Documento53 páginasLFS Tutorial 29-01-2010สุดจัดปลัดบอก.100% (1)
- Manual Do Packet TracerDocumento93 páginasManual Do Packet Tracertsi2012Aún no hay calificaciones
- Arena TutorialDocumento8 páginasArena TutorialCoxa100NocaoAún no hay calificaciones
- Plant LayoutDocumento104 páginasPlant Layoutmar_alus4144Aún no hay calificaciones
- 7xwruldo: You Will Need About Minutes To Complete This TutorialDocumento62 páginas7xwruldo: You Will Need About Minutes To Complete This Tutorialniteen12350% (2)
- Using An External TCP: Visual Components 4.1 Version: November 7, 2018Documento24 páginasUsing An External TCP: Visual Components 4.1 Version: November 7, 2018anupAún no hay calificaciones
- Tutorial AutoCad 2004Documento14 páginasTutorial AutoCad 2004Doni SunAún no hay calificaciones
- CM72L1eL - M5 - A0 Create and Run A Sequence R.1.3 - 20200623 PDFDocumento12 páginasCM72L1eL - M5 - A0 Create and Run A Sequence R.1.3 - 20200623 PDFAriel Padilla RiosAún no hay calificaciones
- Workflow IntroDocumento15 páginasWorkflow IntroVahid MansouriAún no hay calificaciones
- Familiarization With Rational RoseDocumento12 páginasFamiliarization With Rational RoseKota Venkata Jagadeesh100% (1)
- Chapter 8Documento51 páginasChapter 8DINESH TIWARIAún no hay calificaciones
- Rzbiconda Arerdusite Bayuitopek 239z382133e-1a110 - 4Documento15 páginasRzbiconda Arerdusite Bayuitopek 239z382133e-1a110 - 4rpal2014Aún no hay calificaciones
- Excerpt From: Bible and Is An Exercise On Dynamic Blocks. in The Book, TheDocumento6 páginasExcerpt From: Bible and Is An Exercise On Dynamic Blocks. in The Book, Thebsathish83Aún no hay calificaciones
- Architect Getting Started GuideDocumento75 páginasArchitect Getting Started GuideJhonny Rojas RosalesAún no hay calificaciones
- World of AnimationDocumento42 páginasWorld of Animationankur BoraAún no hay calificaciones
- 5.producing An Autocad Factory Layout DrawingDocumento13 páginas5.producing An Autocad Factory Layout Drawingsurya277Aún no hay calificaciones
- Arena Demo 1 PDFDocumento7 páginasArena Demo 1 PDFjegosssAún no hay calificaciones
- Ssrug 2Documento139 páginasSsrug 2mkasimyilmazAún no hay calificaciones
- 4D BIM Tutorials: 6109BEUG - Construction Site ManagementDocumento14 páginas4D BIM Tutorials: 6109BEUG - Construction Site ManagementSelvasathaAún no hay calificaciones
- 08 Turning TutorialDocumento45 páginas08 Turning TutorialrodrigodelacalperezAún no hay calificaciones
- Installation Sequence (Experimental) : 1. Purpose and DescriptionDocumento4 páginasInstallation Sequence (Experimental) : 1. Purpose and DescriptionHamedAún no hay calificaciones
- Business ContentDocumento4 páginasBusiness ContentRakeshAún no hay calificaciones
- Tool Plug in TutorialDocumento23 páginasTool Plug in TutorialoelfatmaAún no hay calificaciones
- Usando MATLAB Con Osciloscopio TektronixDocumento3 páginasUsando MATLAB Con Osciloscopio TektronixjopoarmaAún no hay calificaciones
- Report Designer Manual - 13.chapter 4Documento39 páginasReport Designer Manual - 13.chapter 4euelvis1045Aún no hay calificaciones
- Create and Use Tool ObjectsDocumento35 páginasCreate and Use Tool Objectspa1leoAún no hay calificaciones
- Systems RoutingDocumento60 páginasSystems RoutingspsharmagnAún no hay calificaciones
- AfterEffects TutorialCC2015 With LogoDocumento17 páginasAfterEffects TutorialCC2015 With LogoyunisariatiAún no hay calificaciones
- Rational Rose - Tutorials - Rose 98i With Visual BasicDocumento44 páginasRational Rose - Tutorials - Rose 98i With Visual BasicThangaselviGovindarajAún no hay calificaciones
- Tutorial - 2 - Hierarchical Design and Test FixturesDocumento13 páginasTutorial - 2 - Hierarchical Design and Test FixturesFranco AguilarAún no hay calificaciones
- 3 (1) .Oracle Forms 6iDocumento16 páginas3 (1) .Oracle Forms 6irujuta_kulkarni_2Aún no hay calificaciones
- Chapter 5 - StarUML 5.0 User Guide (Modeling With Sequence Diagram)Documento25 páginasChapter 5 - StarUML 5.0 User Guide (Modeling With Sequence Diagram)onmcvAún no hay calificaciones
- The Definitive Guide to Getting Started with OpenCart 2.xDe EverandThe Definitive Guide to Getting Started with OpenCart 2.xAún no hay calificaciones
- How to Build Self-Driving Cars From Scratch, Part 1: A Step-by-Step Guide to Creating Autonomous Vehicles With PythonDe EverandHow to Build Self-Driving Cars From Scratch, Part 1: A Step-by-Step Guide to Creating Autonomous Vehicles With PythonAún no hay calificaciones
- Collaborative Robotics End User ApplicationsDocumento23 páginasCollaborative Robotics End User ApplicationsMorteza Dianatfar100% (1)
- P-Rob 2 Quick Start Guide 2.1.2Documento4 páginasP-Rob 2 Quick Start Guide 2.1.2Morteza DianatfarAún no hay calificaciones
- Introduction To Video Games Creation Module 14: The Games Industry and Data Analytics, 1 ECTS (Beta)Documento41 páginasIntroduction To Video Games Creation Module 14: The Games Industry and Data Analytics, 1 ECTS (Beta)Morteza DianatfarAún no hay calificaciones
- For The Data Economy: A Trustworthy ArchitectureDocumento1 páginaFor The Data Economy: A Trustworthy ArchitectureMorteza DianatfarAún no hay calificaciones
- X 156135Documento56 páginasX 156135Morteza DianatfarAún no hay calificaciones
- Steps: ............................................ To An Incredible Cover LetterDocumento9 páginasSteps: ............................................ To An Incredible Cover LetterMorteza DianatfarAún no hay calificaciones
- A Zprofessor PDFDocumento142 páginasA Zprofessor PDFMorteza DianatfarAún no hay calificaciones
- Some Sample Exam Questions JDocumento2 páginasSome Sample Exam Questions JMorteza DianatfarAún no hay calificaciones
- طراحی پایپینگ اطراف پمپ هاDocumento25 páginasطراحی پایپینگ اطراف پمپ هاMorteza DianatfarAún no hay calificaciones
- 12 Chapter3 Section4 Oil Refining Industry Page193 220Documento26 páginas12 Chapter3 Section4 Oil Refining Industry Page193 220Muhammad FarooqAún no hay calificaciones
- WorkbenchDocumento1 páginaWorkbenchMorteza DianatfarAún no hay calificaciones
- ME 2012 2013 Packet PDFDocumento3 páginasME 2012 2013 Packet PDFMorteza DianatfarAún no hay calificaciones
- OSX Mavericks Core Technology OverviewDocumento35 páginasOSX Mavericks Core Technology OverviewTeun van der VeldenAún no hay calificaciones
- Com - Nargan at Liravinia - BDocumento22 páginasCom - Nargan at Liravinia - BMorteza DianatfarAún no hay calificaciones
- Cobalch Aps - PTFE DetailDocumento25 páginasCobalch Aps - PTFE DetailMorteza DianatfarAún no hay calificaciones
- TOTAL Process Engineering Design ManualDocumento342 páginasTOTAL Process Engineering Design ManualMorteza Dianatfar100% (21)
- Future Sports Driving: 3 May 2013 Competitions@domusacademy - ItDocumento2 páginasFuture Sports Driving: 3 May 2013 Competitions@domusacademy - ItMorteza DianatfarAún no hay calificaciones
- Configuracion Consola Routers 1Documento6 páginasConfiguracion Consola Routers 1Maria Fernanda Monroy HernandezAún no hay calificaciones
- C++ Short NotesDocumento6 páginasC++ Short NotesRatnadeep BhattacharyaAún no hay calificaciones
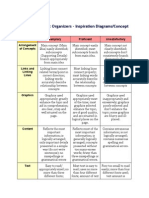
- Rubric For Graphic Organizer1Documento2 páginasRubric For Graphic Organizer1api-235993449Aún no hay calificaciones
- E-Restaurant ApplicationDocumento12 páginasE-Restaurant ApplicationITB450RUTIKA SALUNKHEAún no hay calificaciones
- 4 LermanDocumento2 páginas4 LermanzzztimboAún no hay calificaciones
- BFS and DFS in LispDocumento29 páginasBFS and DFS in Lispvbhargavir0% (1)
- Labmannual AdaDocumento70 páginasLabmannual Adaraja jhaAún no hay calificaciones
- Papers BPS - 17 TO 18 (WATER WING)Documento115 páginasPapers BPS - 17 TO 18 (WATER WING)Engr FaizanAún no hay calificaciones
- Cisco SPA 502G 1-Line IP PhoneDocumento5 páginasCisco SPA 502G 1-Line IP PhonemastrAún no hay calificaciones
- MRP DicussionDocumento6 páginasMRP DicussionNookala Vinod BabuAún no hay calificaciones
- Ups Ge Gt6000Documento41 páginasUps Ge Gt6000David Cusi VenturaAún no hay calificaciones
- Attack: Case StudyDocumento6 páginasAttack: Case StudyRADHAKRISHNA SASTRY PUDIPEDDIAún no hay calificaciones
- Relay 345Documento190 páginasRelay 345mstin22Aún no hay calificaciones
- c3900 PU ReplacementDocumento7 páginasc3900 PU ReplacementAnonymous O6vHkdAún no hay calificaciones
- Majid Ali CVDocumento2 páginasMajid Ali CVnylashahidAún no hay calificaciones
- ESPRIT 2017 R4 Release NotesDocumento7 páginasESPRIT 2017 R4 Release NotesAnonymous WaZo0a1Aún no hay calificaciones
- Lab 2.8.2Documento4 páginasLab 2.8.2LadyBriannaAún no hay calificaciones
- The Coding Chronicles - Chapter 1 PDFDocumento9 páginasThe Coding Chronicles - Chapter 1 PDFhkAún no hay calificaciones
- Beginner's Guide To Bitcoin MiningDocumento2 páginasBeginner's Guide To Bitcoin MiningShareb JafarAún no hay calificaciones
- C - Programv1 Global EdgeDocumento61 páginasC - Programv1 Global EdgeRajendra AcharyaAún no hay calificaciones
- Ece 590 - Digital System Design Using Hardware Description Languages Spring 2006Documento17 páginasEce 590 - Digital System Design Using Hardware Description Languages Spring 2006Omar Valenzuela LopezAún no hay calificaciones
- POC On ECS VS EKS VS EBDocumento6 páginasPOC On ECS VS EKS VS EBPriyesh ShastriAún no hay calificaciones
- Bosch Error CodesDocumento2 páginasBosch Error Codesmejiaca100% (1)
- Synopsis Java Project DispensaryDocumento29 páginasSynopsis Java Project DispensarylovejotAún no hay calificaciones
- One Point - Company Profile.Documento20 páginasOne Point - Company Profile.saudhi rockerAún no hay calificaciones