También podría gustarte
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- ABB Hard To Find Information On Distribution Systems Part IIDocumento27 páginasABB Hard To Find Information On Distribution Systems Part IIRafat ThongAún no hay calificaciones
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- Analysis and Damping Control of Power System Low-Frequency OscillationsDocumento403 páginasAnalysis and Damping Control of Power System Low-Frequency OscillationsJose PocomuchaAún no hay calificaciones
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Power electronics notes: introduction to power semiconductor devicesDocumento263 páginasPower electronics notes: introduction to power semiconductor devicesjay bAún no hay calificaciones
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (894)
- Power Electronic Converter Topologies UsDocumento79 páginasPower Electronic Converter Topologies UsEko Nurcahyo100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- 16 T-IndexDocumento5 páginas16 T-Indexmkdir911Aún no hay calificaciones
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Single Phase AC To AC Conversion Without Frequency RestrictionsDocumento4 páginasSingle Phase AC To AC Conversion Without Frequency RestrictionsTaniyaAún no hay calificaciones
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- LCD - Backlight - Inverter - IC SOLUTIONS PDFDocumento44 páginasLCD - Backlight - Inverter - IC SOLUTIONS PDFVictor Avendaño GrilloAún no hay calificaciones
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Full Wave Bridge RectifierDocumento8 páginasFull Wave Bridge RectifierPurabi DasAún no hay calificaciones
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- A Bidirectional DC-DC Converter For An Energy Storage System With Galvanic IsolationDocumento8 páginasA Bidirectional DC-DC Converter For An Energy Storage System With Galvanic IsolationKrishnaChaitanyaAún no hay calificaciones
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- Electrical Machines and DrivesDocumento43 páginasElectrical Machines and DrivesPijaya ChartpolrakAún no hay calificaciones
- Dronacharya College of Engineering, Greater Noida: S.NO. Author Title SubjectDocumento36 páginasDronacharya College of Engineering, Greater Noida: S.NO. Author Title Subjectidrd852733% (3)
- Diode Electronic ComponentDocumento10 páginasDiode Electronic ComponentEphraem RobinAún no hay calificaciones
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Modeling Flyback TransformerDocumento8 páginasModeling Flyback TransformerHrishikesh KadamAún no hay calificaciones
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- ET1006 Chapter 19 Part 3 Voltage RegulatorDocumento16 páginasET1006 Chapter 19 Part 3 Voltage RegulatorfastAún no hay calificaciones
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Digital PowerDocumento20 páginasDigital PowerPacebok PacebokAún no hay calificaciones
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Dual ConvertersDocumento13 páginasDual ConvertersGabriel SanthoshkumarAún no hay calificaciones
- Infineon XDPS2201 DataSheet v01 - 10 ENDocumento75 páginasInfineon XDPS2201 DataSheet v01 - 10 EN偉誠曾Aún no hay calificaciones
- 01-Introduction To VSCDocumento30 páginas01-Introduction To VSCeng7senAún no hay calificaciones
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
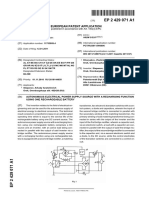
- Autonomous Power Supply with Increased Operation Time Using a Single BatteryDocumento6 páginasAutonomous Power Supply with Increased Operation Time Using a Single BatteryPopescu George BogdanAún no hay calificaciones
- Revised - Syllabus - Final - Year - For - 2021-21 DR BatuDocumento16 páginasRevised - Syllabus - Final - Year - For - 2021-21 DR BatuSubhash MurkuteAún no hay calificaciones
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- A4954 DatasheetDocumento9 páginasA4954 DatasheetAngly1959Aún no hay calificaciones
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- Tutorial of Non-Isolated DC-DC Converter in Continuous Mode (Benny Yeung)Documento3 páginasTutorial of Non-Isolated DC-DC Converter in Continuous Mode (Benny Yeung)Farhan Malik100% (1)
- EVAL - 2kW - ZVS - FB - CFD7: 2 KW ZVS Phase-Shift Full-Bridge Evaluation BoardDocumento16 páginasEVAL - 2kW - ZVS - FB - CFD7: 2 KW ZVS Phase-Shift Full-Bridge Evaluation BoardshwetasapateAún no hay calificaciones
- Handbook of Power Management Circuits: Haruo Kobayashi Takashi NabeshimaDocumento22 páginasHandbook of Power Management Circuits: Haruo Kobayashi Takashi NabeshimaPedroPesantez0% (2)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Boost and Buck converter design formulasDocumento4 páginasBoost and Buck converter design formulasEng Mohamed OsmanAún no hay calificaciones
- As The Name Suggests, Permit Tap Changing and Hence Voltage Regulation With The Transformer During On-LoadDocumento41 páginasAs The Name Suggests, Permit Tap Changing and Hence Voltage Regulation With The Transformer During On-LoadDaniel Galabo RangcapanAún no hay calificaciones
- Lecture On Power SupplyDocumento81 páginasLecture On Power SupplyMATE0100% (2)
- Infineon IRFB3077 DataSheet v01 - 01 ENDocumento9 páginasInfineon IRFB3077 DataSheet v01 - 01 ENimran tahirAún no hay calificaciones
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- Ece 310Documento10 páginasEce 310Arlyn AzzamAún no hay calificaciones
- Block Diagram Rdenca412Wjqz: PowerDocumento3 páginasBlock Diagram Rdenca412Wjqz: PowerMohamed ElbanadiAún no hay calificaciones
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)