También podría gustarte
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Aún no hay calificaciones
- 110 Waveform Generator Projects for the Home ConstructorDe Everand110 Waveform Generator Projects for the Home ConstructorCalificación: 4 de 5 estrellas4/5 (1)
- Electronics And Circuit Design Made EasyDe EverandElectronics And Circuit Design Made EasyCalificación: 3 de 5 estrellas3/5 (9)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Calificación: 2.5 de 5 estrellas2.5/5 (3)
- Electronics Catalog: Propulsion ControlsDocumento24 páginasElectronics Catalog: Propulsion ControlsElliot CapsonAún no hay calificaciones
- A Low Cost Automatic Curve Tracer PDFDocumento5 páginasA Low Cost Automatic Curve Tracer PDFuditagarwal1997Aún no hay calificaciones
- Analog Circuit Design Volume Three: Design Note CollectionDe EverandAnalog Circuit Design Volume Three: Design Note CollectionCalificación: 3 de 5 estrellas3/5 (2)
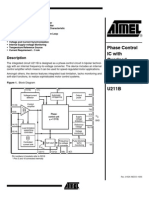
- Phase Control IC With Overload Limitation For Tacho Applications U211BDocumento29 páginasPhase Control IC With Overload Limitation For Tacho Applications U211BescalucioAún no hay calificaciones
- Phase-Control IC - Tacho Applications: DescriptionDocumento11 páginasPhase-Control IC - Tacho Applications: DescriptionAlex FierăscuAún no hay calificaciones
- Low Cost Current Feedback Phase Control Circuit: DescriptionDocumento11 páginasLow Cost Current Feedback Phase Control Circuit: Descriptiongruja57Aún no hay calificaciones
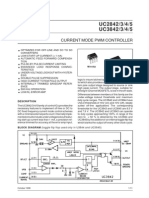
- UC3842 DesignDocumento7 páginasUC3842 DesignCui BapAún no hay calificaciones
- Low Cost Current Feedback Phase Control Circuit: DescriptionDocumento10 páginasLow Cost Current Feedback Phase Control Circuit: Descriptioncesare.alcesteAún no hay calificaciones
- Tda 1085 CDocumento12 páginasTda 1085 CKucora IstvanAún no hay calificaciones
- 220v DC Motor Speed Control Using Ic RegulatorDocumento14 páginas220v DC Motor Speed Control Using Ic RegulatorZagorchillo0% (1)
- TDA1085CDDocumento13 páginasTDA1085CDCristiano BruschiniAún no hay calificaciones
- UC2842 Philips AN1272 PDFDocumento7 páginasUC2842 Philips AN1272 PDFupali01Aún no hay calificaciones
- Data Sheet: TDA8380ADocumento21 páginasData Sheet: TDA8380Ajvazquez501Aún no hay calificaciones
- Open Loop Phase Control Circuit: DescriptionDocumento7 páginasOpen Loop Phase Control Circuit: DescriptionMuhammad NajibAún no hay calificaciones
- Tda1085c DDocumento12 páginasTda1085c DpamururamuAún no hay calificaciones
- Control Ics For Switched-Mode Power Supplies Tda 4601: Bipolar IcDocumento27 páginasControl Ics For Switched-Mode Power Supplies Tda 4601: Bipolar IcMircea PanzariuAún no hay calificaciones
- A 2918 SW Data SheetDocumento8 páginasA 2918 SW Data SheetGustavo LunaAún no hay calificaciones
- Principles Applications ICL7660Documento10 páginasPrinciples Applications ICL7660Juan F. RamosAún no hay calificaciones
- Tda 4601Documento8 páginasTda 4601Mirko AleksicAún no hay calificaciones
- SM72441 Programmable Maximum Power Point Tracking Controller For Photovoltaic Solar PanelsDocumento10 páginasSM72441 Programmable Maximum Power Point Tracking Controller For Photovoltaic Solar PanelsShahid SiddiqueAún no hay calificaciones
- NE555Documento6 páginasNE555Sebastian DavidAún no hay calificaciones
- Schema Documentatie U2008BDocumento5 páginasSchema Documentatie U2008BLaurentiu IacobAún no hay calificaciones
- TSM 101Documento15 páginasTSM 101thiemncAún no hay calificaciones
- Trailing Dimmer U2102BDocumento19 páginasTrailing Dimmer U2102BsamitinjayAún no hay calificaciones
- Mc1455u - DatasheetDocumento10 páginasMc1455u - Datasheetmark777markAún no hay calificaciones
- Mc1455-d Timer IcDocumento11 páginasMc1455-d Timer IcDecker JamesAún no hay calificaciones
- Blazer 400-800 Service ManualDocumento34 páginasBlazer 400-800 Service ManualdaossaAún no hay calificaciones
- !!!!!!!!!AC SINGLE PHASE INDUCTION MOTOR SPEED CONTROL U2008b PDFDocumento6 páginas!!!!!!!!!AC SINGLE PHASE INDUCTION MOTOR SPEED CONTROL U2008b PDFIchbinsAún no hay calificaciones
- Ses-12 TDPSDocumento31 páginasSes-12 TDPSbaljeetjatAún no hay calificaciones
- 100 VOLT 30 AMP H-Bridge PWM Motor Driver/Amplifier: M.S.Kennedy CorpDocumento7 páginas100 VOLT 30 AMP H-Bridge PWM Motor Driver/Amplifier: M.S.Kennedy CorpDaniel SanchezAún no hay calificaciones
- En CD00000085Documento16 páginasEn CD00000085amijoski6051Aún no hay calificaciones
- Dsa 265104Documento20 páginasDsa 265104foxx034Aún no hay calificaciones
- Data Sheet: IC Timers 555 and 556Documento8 páginasData Sheet: IC Timers 555 and 556Adenilson MatiasAún no hay calificaciones
- UC3879Documento9 páginasUC3879Christina Tio TrisnasariAún no hay calificaciones
- Design Guideline For Flyback Charger Using FAN302HL/ULDocumento20 páginasDesign Guideline For Flyback Charger Using FAN302HL/ULteomondoAún no hay calificaciones
- DatasheetDocumento15 páginasDatasheetUngureanu VasileAún no hay calificaciones
- Analog Drive Control Module (DSZA)Documento11 páginasAnalog Drive Control Module (DSZA)PradeepAún no hay calificaciones
- Datasheet 2Documento10 páginasDatasheet 2miguel angel jaramilloAún no hay calificaciones
- U 208 BDocumento7 páginasU 208 BPicastro ArtesaniasAún no hay calificaciones
- 3ph Ac Motor ControlerDocumento11 páginas3ph Ac Motor Controleradamkam1111Aún no hay calificaciones
- Saa1042v PDFDocumento7 páginasSaa1042v PDFVinny TukAún no hay calificaciones
- 1.5A Power Switching Regulator: DescriptionDocumento16 páginas1.5A Power Switching Regulator: DescriptionPravin MevadaAún no hay calificaciones
- LMD18201 3A, 55V H-Bridge: General DescriptionDocumento8 páginasLMD18201 3A, 55V H-Bridge: General DescriptionNairo FilhoAún no hay calificaciones
- Ec 2404 - Electronic System Design LabDocumento66 páginasEc 2404 - Electronic System Design LabjebadanielAún no hay calificaciones
- Stepper Motor Controllers: DescriptionDocumento12 páginasStepper Motor Controllers: DescriptionGigi TyireanAún no hay calificaciones
- Uc 3854Documento12 páginasUc 3854Leandro CoradiAún no hay calificaciones
- MC 1496Documento12 páginasMC 1496Alejandro GarciaAún no hay calificaciones
- VNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverDocumento26 páginasVNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverIan LuksAún no hay calificaciones
- Datasheet l298bDocumento14 páginasDatasheet l298bgioganAún no hay calificaciones
- MC1455Documento13 páginasMC1455eduardolsAún no hay calificaciones
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesDe EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesAún no hay calificaciones
- Pci-Comm Tarjeta Pci Rs422 Rs485Documento84 páginasPci-Comm Tarjeta Pci Rs422 Rs485tavobeckerAún no hay calificaciones
- 8051 SchematicDocumento37 páginas8051 SchematicShabeeb Ali OruvangaraAún no hay calificaciones
- 4N25 PDFDocumento14 páginas4N25 PDFDiana GarciaAún no hay calificaciones
- bc458 PDFDocumento7 páginasbc458 PDFKristy BarrettAún no hay calificaciones
- 78L15Documento3 páginas78L15tavobeckerAún no hay calificaciones
- PLC Melsec PDFDocumento85 páginasPLC Melsec PDFtavobeckerAún no hay calificaciones
- Data Sheet of Ic Uc 3844 Part1Documento12 páginasData Sheet of Ic Uc 3844 Part1Santosh KumarAún no hay calificaciones
- LM78XX Series Voltage Regulators: General DescriptionDocumento6 páginasLM78XX Series Voltage Regulators: General DescriptiondebabratalogonAún no hay calificaciones
- Variador Frecuencia SS2 Shihlin ElectricDocumento161 páginasVariador Frecuencia SS2 Shihlin Electrictavobecker100% (3)
- NumeroDocumento1 páginaNumerotavobeckerAún no hay calificaciones
- Taos SkiDocumento1 páginaTaos SkitavobeckerAún no hay calificaciones
- FR Configurator Instruction Manual - Ib0600242aDocumento81 páginasFR Configurator Instruction Manual - Ib0600242atavobeckerAún no hay calificaciones
- Wotantser Texto Domingo20 Abril 20008Documento1 páginaWotantser Texto Domingo20 Abril 20008tavobeckerAún no hay calificaciones
- RUN2011 - OkDocumento2 páginasRUN2011 - OktavobeckerAún no hay calificaciones
- LM124/LM224/LM324/LM2902 Low Power Quad Operational AmplifiersDocumento21 páginasLM124/LM224/LM324/LM2902 Low Power Quad Operational Amplifiersapple.scotch.fool3550Aún no hay calificaciones
- Q Amp RMX Series SpecsDocumento2 páginasQ Amp RMX Series SpecsdreeayocsmAún no hay calificaciones
- Compuware Catalog SmallDocumento50 páginasCompuware Catalog SmallDmitry PakhatovAún no hay calificaciones
- User Manual: SRV02 Rotary Servo Base UnitDocumento25 páginasUser Manual: SRV02 Rotary Servo Base UnitSeyhaSunAún no hay calificaciones
- Handheld - Hariss 5880m-Hh104 MultibandDocumento2 páginasHandheld - Hariss 5880m-Hh104 MultibandYadi Rudi100% (1)
- SSBproject PDFDocumento5 páginasSSBproject PDFCibi CristianAún no hay calificaciones
- TI - FilterPro Low-Pass Design ToolDocumento6 páginasTI - FilterPro Low-Pass Design ToolmbenhebiAún no hay calificaciones
- 12 A 8Documento9 páginas12 A 8Katherine TimpsonAún no hay calificaciones
- 1 Product Category SpecialDocumento16 páginas1 Product Category SpecialOmar SaeedAún no hay calificaciones
- Module 3Documento73 páginasModule 3Mahesh Shalinda MendisAún no hay calificaciones
- FP10000Q FP6000Q FP2400QDocumento4 páginasFP10000Q FP6000Q FP2400QaaaaaAún no hay calificaciones
- TA-FE370/FE570 Service ManualDocumento16 páginasTA-FE370/FE570 Service ManualA340_600Aún no hay calificaciones
- Tunwall Radio Manual TRC-1P 372011 DielectricDocumento32 páginasTunwall Radio Manual TRC-1P 372011 DielectricAndre Moreira GouveiaAún no hay calificaciones
- 08 Grp11 Hybrid EbcmDocumento31 páginas08 Grp11 Hybrid Ebcmeurospeed2Aún no hay calificaciones
- Strain GaugeDocumento18 páginasStrain GaugeShannon Hayden0% (1)
- Analysis and Design of A Transformer-Feedback-Based Wideband ReceiverDocumento12 páginasAnalysis and Design of A Transformer-Feedback-Based Wideband ReceiverJeong-geun KimAún no hay calificaciones
- Manual Servo Yaskawa 2 PDFDocumento88 páginasManual Servo Yaskawa 2 PDFNICOLAS AMAYA USECHEAún no hay calificaciones
- Section 4 - 8 The MOSFET High Frequency Model LectureDocumento4 páginasSection 4 - 8 The MOSFET High Frequency Model LecturePina NasaAún no hay calificaciones
- ST-09 Electronic ComponentDocumento13 páginasST-09 Electronic ComponentRanjeet SinghAún no hay calificaciones
- 74F04Documento8 páginas74F04frankkubaAún no hay calificaciones
- Small-Signal Transistor Amplifiers PDFDocumento14 páginasSmall-Signal Transistor Amplifiers PDFManoj Singh RawatAún no hay calificaciones
- SourcesDocumento23 páginasSourcesmmkattaAún no hay calificaciones
- Onkyo HTP-320 SpeakersDocumento8 páginasOnkyo HTP-320 SpeakersKetan DodhiaAún no hay calificaciones
- Op AmpDocumento22 páginasOp AmplolmanAún no hay calificaciones
- BOSE 1600VI and 1800VI Professional AmplifierDocumento60 páginasBOSE 1600VI and 1800VI Professional AmplifierbakozoltanAún no hay calificaciones
- Lesson 4 - RL RS EffectDocumento35 páginasLesson 4 - RL RS EffectditmemayAún no hay calificaciones
- Fosi BT20A - Pro - User - ManualDocumento26 páginasFosi BT20A - Pro - User - ManualWei Ming TanAún no hay calificaciones
- Phoenix Contact 2810829 enDocumento9 páginasPhoenix Contact 2810829 enSaeed ShahriarinezhadAún no hay calificaciones
- Syllabus MSPHYS 2020-2021-1Documento67 páginasSyllabus MSPHYS 2020-2021-1mithunAún no hay calificaciones