También podría gustarte
- ME2142E Speed or Position Control of A DC MotorDocumento10 páginasME2142E Speed or Position Control of A DC MotorCinderella021275% (4)
- Lab10b - SERVO TRAINER 2 Response Calculating and MeasurementsDocumento8 páginasLab10b - SERVO TRAINER 2 Response Calculating and MeasurementssairafiAún no hay calificaciones
- Project Report Control (DC Motor Module DCM150f) KP KDDocumento5 páginasProject Report Control (DC Motor Module DCM150f) KP KD黒い からすAún no hay calificaciones
- Mechatronics Unit III and IV Question and AnswersDocumento6 páginasMechatronics Unit III and IV Question and AnswersSaravanan MathiAún no hay calificaciones
- AutoCAD Mechanical 2015 Overview Brochure - A4Documento4 páginasAutoCAD Mechanical 2015 Overview Brochure - A4Raul ReynosoAún no hay calificaciones
- Solutions To Irodov's Problems - Volume IIDocumento442 páginasSolutions To Irodov's Problems - Volume IIZequinha de Abreu100% (2)
- Lab 05 (Servo)Documento4 páginasLab 05 (Servo)hitesh89Aún no hay calificaciones
- Me2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDocumento9 páginasMe2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDeepak RainaAún no hay calificaciones
- C2 - Error Channel Investigation and Simple Position Control SystemDocumento9 páginasC2 - Error Channel Investigation and Simple Position Control SystemizamaiyusAún no hay calificaciones
- FKE SEE 3732 Angular Position Control LabDocumento8 páginasFKE SEE 3732 Angular Position Control LabShankar ArunmozhiAún no hay calificaciones
- Linear Control TCDocumento46 páginasLinear Control TCjibranbaladiAún no hay calificaciones
- ELEC 5565 - Electric Drives and CTRL LabDocumento13 páginasELEC 5565 - Electric Drives and CTRL LabNur Azlin Mohd YusoffAún no hay calificaciones
- Control LabDocumento61 páginasControl LabIhsan AteyaAún no hay calificaciones
- lab13Documento9 páginaslab13Lûtwàmä JôëAún no hay calificaciones
- Ac Position Control Trainer ManualDocumento7 páginasAc Position Control Trainer ManualSHANKARAún no hay calificaciones
- Process - Control SimulatorDocumento7 páginasProcess - Control SimulatorSakshi RajputAún no hay calificaciones
- Control Systems Lab ManualDocumento67 páginasControl Systems Lab ManualRockstar Rich100% (1)
- Etd Lab2Documento10 páginasEtd Lab2Isaya KawanaAún no hay calificaciones
- Basic Control Systems LabDocumento10 páginasBasic Control Systems LabNut PamornAún no hay calificaciones
- Electro-Hydraulic Controller Functional DescriptionDocumento8 páginasElectro-Hydraulic Controller Functional DescriptionvesridharAún no hay calificaciones
- Control Exp 2 Student ManualDocumento5 páginasControl Exp 2 Student ManualMohammad Bony IsrailAún no hay calificaciones
- (P1) Modul DC Motor Speed Control SystemDocumento13 páginas(P1) Modul DC Motor Speed Control SystemTito Bambang Priambodo - 6726Aún no hay calificaciones
- EHTC Functional DescriptionDocumento8 páginasEHTC Functional Descriptionveer_s100% (2)
- Technical Feedback EhtcDocumento9 páginasTechnical Feedback EhtcPrashant Kumar ChoudharyAún no hay calificaciones
- 05 - Electro - Hydraulic ControllerDocumento7 páginas05 - Electro - Hydraulic Controllerwildhoney1979Aún no hay calificaciones
- Control System Lab Manual (EE-324-FDocumento52 páginasControl System Lab Manual (EE-324-FMohammad Umar RehmanAún no hay calificaciones
- Space Engineering Lab Manual MDocumento43 páginasSpace Engineering Lab Manual Mmanikandan_murugaiahAún no hay calificaciones
- EHC NewDocumento46 páginasEHC NewSam100% (6)
- Psoc Unit - 5Documento22 páginasPsoc Unit - 5kondurumahi50Aún no hay calificaciones
- Design of An Antenna Azimuth Position Control SystemDocumento12 páginasDesign of An Antenna Azimuth Position Control SystemUche PaulAún no hay calificaciones
- M.A.M College of Engineering: Department of Electrical and Electronics EnggDocumento16 páginasM.A.M College of Engineering: Department of Electrical and Electronics EnggKrishna ChaitanyaAún no hay calificaciones
- EHC1Documento30 páginasEHC1Jagadeesan SaiAún no hay calificaciones
- Mod 4 Book 3 Servo MechanismsDocumento66 páginasMod 4 Book 3 Servo Mechanismsranjit prasadAún no hay calificaciones
- Tm450 Acopos Control Concept and AdjustmentDocumento51 páginasTm450 Acopos Control Concept and Adjustmentsatish734Aún no hay calificaciones
- Unit2 MSDocumento43 páginasUnit2 MSchandramohan murugan100% (1)
- Ehtc JharliDocumento38 páginasEhtc JharliRakesh Bagri100% (2)
- KWU Electro Hydraulic Governing Final1Documento41 páginasKWU Electro Hydraulic Governing Final1Sam80% (5)
- Proportional Speed ControlDocumento2 páginasProportional Speed ControlSafira Mahdi100% (1)
- Exp 7 Familiarization With The ChopperInverter Control Unit PDFDocumento10 páginasExp 7 Familiarization With The ChopperInverter Control Unit PDFusmpowerlabAún no hay calificaciones
- Control Theory MaterialDocumento18 páginasControl Theory MaterialalwaysharshAún no hay calificaciones
- DESIGNING THE PROPORTIONAL (P) AND PROPORTIONAL-INTEGRAL (PI) CONTROLLERS Control SystemDocumento7 páginasDESIGNING THE PROPORTIONAL (P) AND PROPORTIONAL-INTEGRAL (PI) CONTROLLERS Control SystemjayxcellAún no hay calificaciones
- Characteristics and Compensation of ServomotorsDocumento46 páginasCharacteristics and Compensation of Servomotorsabixek100% (2)
- Ac Servo MotorDocumento14 páginasAc Servo MotorJeyanthAún no hay calificaciones
- QNET Exp1 Speed StudentDocumento18 páginasQNET Exp1 Speed StudentMatheus MaterazziAún no hay calificaciones
- Design Lab Report (1)Documento8 páginasDesign Lab Report (1)Himanshu BansalAún no hay calificaciones
- CONTROL LAB EXP 02 (Open-Loop and Closed-Loop Speed Control of A DC Motor) - ACSDocumento8 páginasCONTROL LAB EXP 02 (Open-Loop and Closed-Loop Speed Control of A DC Motor) - ACSSakib MahmudAún no hay calificaciones
- Servo Motor SystemDocumento8 páginasServo Motor SystemAnonymous Y7WZ3dqoXhAún no hay calificaciones
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocumento14 páginasAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARAún no hay calificaciones
- Calibration and Control of Servo TrainerDocumento14 páginasCalibration and Control of Servo Trainersyedhamdan45Aún no hay calificaciones
- LAB REPORT 1Documento28 páginasLAB REPORT 1PAULUS MAONGOAún no hay calificaciones
- Experiment No: 1 Speed Control of DC Motor: Experimental Setup Containing The Following UnitsDocumento6 páginasExperiment No: 1 Speed Control of DC Motor: Experimental Setup Containing The Following UnitsdeepakAún no hay calificaciones
- Closedloop PID Control of Universal MotorDocumento9 páginasClosedloop PID Control of Universal MotorabhywaAún no hay calificaciones
- Experiment 03Documento8 páginasExperiment 03Zeynal Abidin ŞabaşAún no hay calificaciones
- Learning Objectives: Servo ValvesDocumento21 páginasLearning Objectives: Servo ValvesAkshay AggrawalAún no hay calificaciones
- Bytronic Pendulum Control System DocumentationDocumento37 páginasBytronic Pendulum Control System DocumentationMohamed Elsayed HasanAún no hay calificaciones
- Ac ServoDocumento38 páginasAc ServoPhạm Hữu KỳAún no hay calificaciones
- SFC OperationDocumento10 páginasSFC OperationKelvin LiewAún no hay calificaciones
- Accurate Position Estimation in Switched Reluctance Motor With Prompt StartingDocumento10 páginasAccurate Position Estimation in Switched Reluctance Motor With Prompt Startingmounicapaluru_351524Aún no hay calificaciones
- Turbine Governor ModelingDocumento28 páginasTurbine Governor ModelingGuruxyz100% (1)
- Control System Lab EE-324-FDocumento45 páginasControl System Lab EE-324-FDheeraj KumarAún no hay calificaciones
- Control of DC Motor Using Different Control StrategiesDe EverandControl of DC Motor Using Different Control StrategiesAún no hay calificaciones
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetCalificación: 2 de 5 estrellas2/5 (1)
- 13 Things Newsletter - Item #4 (Case Studies)Documento3 páginas13 Things Newsletter - Item #4 (Case Studies)hishamwahidinAún no hay calificaciones
- Advertorial SSP1 EngDocumento1 páginaAdvertorial SSP1 EngJoanne Melissa WongAún no hay calificaciones
- Piof Ar EngDocumento29 páginasPiof Ar EnghishamwahidinAún no hay calificaciones
- Aalco Metals LTD Aluminium Alloy Temper Designations 93Documento3 páginasAalco Metals LTD Aluminium Alloy Temper Designations 93sureshrnalAún no hay calificaciones
- Advertorial SSP1 EngDocumento1 páginaAdvertorial SSP1 EngJoanne Melissa WongAún no hay calificaciones
- Advertorial SSP1 EngDocumento1 páginaAdvertorial SSP1 EngJoanne Melissa WongAún no hay calificaciones
- Advertorial SSP1 EngDocumento1 páginaAdvertorial SSP1 EngJoanne Melissa WongAún no hay calificaciones
- Advertorial SSP1 EngDocumento1 páginaAdvertorial SSP1 EngJoanne Melissa WongAún no hay calificaciones
- Advertorial SSP1 EngDocumento1 páginaAdvertorial SSP1 EngJoanne Melissa WongAún no hay calificaciones
- Method Statement For BJ Walltech IbeamDocumento6 páginasMethod Statement For BJ Walltech IbeamhishamwahidinAún no hay calificaciones
- Bill of Material: The Hanover CompanyDocumento17 páginasBill of Material: The Hanover CompanyLIVIAAún no hay calificaciones
- 1 05 Lab Crime Scene Sketch GADocumento2 páginas1 05 Lab Crime Scene Sketch GAthis is hardly gonna be usedAún no hay calificaciones
- Gabion Retaining Wall Design GuideDocumento30 páginasGabion Retaining Wall Design GuideThomas Hill80% (5)
- Cross Belt Magnetic Separator (CBMS)Documento2 páginasCross Belt Magnetic Separator (CBMS)mkbhat17kAún no hay calificaciones
- Unit-I-2-Marks-With-Ans3 Hydrology1 - BY Civildatas - Blogspot.in PDFDocumento4 páginasUnit-I-2-Marks-With-Ans3 Hydrology1 - BY Civildatas - Blogspot.in PDFHimanshu sharmaAún no hay calificaciones
- RMA 3000 Remote Meter Assemblies Specifications: 34-ST-03-81, July 2017Documento8 páginasRMA 3000 Remote Meter Assemblies Specifications: 34-ST-03-81, July 2017Amir LopezAún no hay calificaciones
- San Unit-Wise QuestionsDocumento6 páginasSan Unit-Wise QuestionsSushmitha KodupakaAún no hay calificaciones
- Introduction To Curve FittingDocumento10 páginasIntroduction To Curve FittingscjofyWFawlroa2r06YFVabfbajAún no hay calificaciones
- Convert MBR Disk To GPT DiskDocumento5 páginasConvert MBR Disk To GPT Diskjelenjek83Aún no hay calificaciones
- L02-EIP Module User ManualDocumento37 páginasL02-EIP Module User ManualSergio Mauricio Acuña BravoAún no hay calificaciones
- DSD - Assignment 1 2018Documento3 páginasDSD - Assignment 1 2018Naveen KumarAún no hay calificaciones
- Climate Change: The Fork at The End of NowDocumento28 páginasClimate Change: The Fork at The End of NowMomentum Press100% (1)
- Astm D5501Documento3 páginasAstm D5501mhmdgalalAún no hay calificaciones
- 997-3 CIP Safety Adapter: Single Point Lesson (SPL) - Configure CIP Safety Adapter and A-B PLCDocumento18 páginas997-3 CIP Safety Adapter: Single Point Lesson (SPL) - Configure CIP Safety Adapter and A-B PLCTensaigaAún no hay calificaciones
- Microstation V8I Accudraw Basics: Bentley Institute Course GuideDocumento80 páginasMicrostation V8I Accudraw Basics: Bentley Institute Course Guideh_eijy2743Aún no hay calificaciones
- Employee performance factors analysis electronic companyDocumento10 páginasEmployee performance factors analysis electronic companyAmrithaAún no hay calificaciones
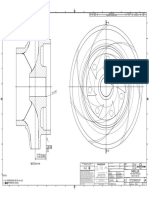
- Impeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLDocumento1 páginaImpeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLSenthilkumar RamalingamAún no hay calificaciones
- Winegard Sensar AntennasDocumento8 páginasWinegard Sensar AntennasMichael ColeAún no hay calificaciones
- Exponential & Logarithmic FunctionsDocumento13 páginasExponential & Logarithmic FunctionsRahul SankaranAún no hay calificaciones
- Practical-10: AIM: Installing Active Directory and Creating AD ObjectsDocumento4 páginasPractical-10: AIM: Installing Active Directory and Creating AD ObjectsnisuAún no hay calificaciones
- This HandoutDocumento11 páginasThis HandoutAnonymous QM0NLqZOAún no hay calificaciones
- Answers To Chemistry Homework 5.1 From Particles To Solutions P. 178 # 8,9,10Documento6 páginasAnswers To Chemistry Homework 5.1 From Particles To Solutions P. 178 # 8,9,10fantasy373Aún no hay calificaciones
- Spesifikasi Produk SL-500Documento2 páginasSpesifikasi Produk SL-500tekmed koesnadiAún no hay calificaciones
- Serial Port InterfacingDocumento5 páginasSerial Port Interfacingyampire100% (1)
- Displaymax JR 1500 SpecsDocumento1 páginaDisplaymax JR 1500 SpecsFRANCISCOAún no hay calificaciones
- Tunnel DamperDocumento8 páginasTunnel DamperIvanAún no hay calificaciones
- Hydrogen and Its Compound.1Documento10 páginasHydrogen and Its Compound.1abhishekAún no hay calificaciones
- Synology DS718 Plus Data Sheet EnuDocumento6 páginasSynology DS718 Plus Data Sheet EnuSteve AttwoodAún no hay calificaciones