También podría gustarte
- Conservación de energía explica por qué la pelota regresa más lentaDocumento5 páginasConservación de energía explica por qué la pelota regresa más lentaJill Martínez Velásquez75% (4)
- Problema 4 P 1Documento7 páginasProblema 4 P 1Juan Pablo RequezAún no hay calificaciones
- Conclusiones 2Documento4 páginasConclusiones 2Joan GoodmanAún no hay calificaciones
- Pautas Generales de Trabajo en Este CursoDocumento2 páginasPautas Generales de Trabajo en Este CursoCarlos BlancasAún no hay calificaciones
- Grammar Appendix Answer KeyDocumento2 páginasGrammar Appendix Answer KeyFrancisco Royuela FloresAún no hay calificaciones
- Criterios Expresión OralDocumento2 páginasCriterios Expresión OralRebeca Escrig SotoAún no hay calificaciones
- Grammar Appendix 123Documento13 páginasGrammar Appendix 123Carlos BlancasAún no hay calificaciones
- Temario MEDMA 2015-2016Documento14 páginasTemario MEDMA 2015-2016Carlos BlancasAún no hay calificaciones
- Tema 1 Ej Libro m3Documento1 páginaTema 1 Ej Libro m3cheeta111Aún no hay calificaciones
- UNED Exam PracticeDocumento6 páginasUNED Exam PracticeCarlos BlancasAún no hay calificaciones
- A 1Documento9 páginasA 1Carlos BlancasAún no hay calificaciones
- Tema 1 Ej Libro m3Documento1 páginaTema 1 Ej Libro m3cheeta111Aún no hay calificaciones
- Presentación Nivel B1Documento3 páginasPresentación Nivel B1Carlos BlancasAún no hay calificaciones
- Tema 3Documento1 páginaTema 3Carlos BlancasAún no hay calificaciones
- Tema 4Documento1 páginaTema 4Carlos BlancasAún no hay calificaciones
- WuolahP-Examen Resuelto Primer Parcial 1Documento6 páginasWuolahP-Examen Resuelto Primer Parcial 1Carlos BlancasAún no hay calificaciones
- Acotacion FuncionalDocumento25 páginasAcotacion FuncionalJoan FragAún no hay calificaciones
- Preguntas Examen Materiales IIDocumento32 páginasPreguntas Examen Materiales IICarlos BlancasAún no hay calificaciones
- PreguntasDocumento6 páginasPreguntasCarlos BlancasAún no hay calificaciones
- Resist en CIA de Materiales IDocumento209 páginasResist en CIA de Materiales Ijaime100% (3)
- WuolahP-Examen Resuelto Segundo ParcialDocumento5 páginasWuolahP-Examen Resuelto Segundo ParcialCarlos BlancasAún no hay calificaciones
- Resumen Tema 2.faradayDocumento3 páginasResumen Tema 2.faradayCarlos BlancasAún no hay calificaciones
- Solucion Lmina BT II 232 Por Proyectantes y Homologia 20092010Documento6 páginasSolucion Lmina BT II 232 Por Proyectantes y Homologia 20092010Carlos BlancasAún no hay calificaciones
- IMS Capitulo4Documento10 páginasIMS Capitulo4Lucho Neciosup QuesquenAún no hay calificaciones
- Programa AsignaturaDocumento3 páginasPrograma AsignaturaCarlos BlancasAún no hay calificaciones
- Problemas Resueltos Tema1Documento14 páginasProblemas Resueltos Tema1alvaromendezpinoAún no hay calificaciones
- Presenta Tema 5 Sist ProductivosDocumento34 páginasPresenta Tema 5 Sist ProductivosCarlos BlancasAún no hay calificaciones
- 1septiembre Grados 14 15aulasDocumento16 páginas1septiembre Grados 14 15aulasCarlos BlancasAún no hay calificaciones
- Problemas CNCDocumento1 páginaProblemas CNCCarlos BlancasAún no hay calificaciones
- PII. T10 Proyectos de Instalaciones Electricas - PubDocumento28 páginasPII. T10 Proyectos de Instalaciones Electricas - PubCarlos BlancasAún no hay calificaciones
- Problemas Resueltos Tema1Documento14 páginasProblemas Resueltos Tema1alvaromendezpinoAún no hay calificaciones
- Eficiencia EnergeticaDocumento66 páginasEficiencia EnergeticaCarlos RomeroAún no hay calificaciones
- MétodoLSidentificaDocumento4 páginasMétodoLSidentificaAlexandre Baeza MorenoAún no hay calificaciones
- Gui AaaaaaDocumento226 páginasGui AaaaaaAroldo Cacildo Vicente VásquezAún no hay calificaciones
- 8° Taller 2. Quimica - Sergio M.Documento4 páginas8° Taller 2. Quimica - Sergio M.Julio LopezAún no hay calificaciones
- Trabajo Adolescente y Desercion Escolar en El PeruDocumento49 páginasTrabajo Adolescente y Desercion Escolar en El PeruCIES: Consorcio de Investigación Econimica y Social100% (1)
- Diapositivas Interes SimpleDocumento50 páginasDiapositivas Interes SimpleAldana Orellana JazminAún no hay calificaciones
- Ensayo ReguladoresDocumento9 páginasEnsayo ReguladoresEddy SabanAún no hay calificaciones
- Codigos de Errores en Una PCDocumento15 páginasCodigos de Errores en Una PCJose miguel IglesiasAún no hay calificaciones
- Simulación de perfiladora con PLC TelemecaniqueDocumento10 páginasSimulación de perfiladora con PLC TelemecaniqueRodrigo AlvarezAún no hay calificaciones
- 2.4. Resalto HidráulicoDocumento14 páginas2.4. Resalto HidráulicoErlan CorrilloAún no hay calificaciones
- Tanque de Almacenamiento (3.1)Documento141 páginasTanque de Almacenamiento (3.1)Jessica Cruz MendozaAún no hay calificaciones
- 1435-Article Text-43071-1-10-20190506Documento16 páginas1435-Article Text-43071-1-10-20190506Luis Miguel Giraldo GonzálezAún no hay calificaciones
- Cartilla ClimaticaDocumento89 páginasCartilla ClimaticaJessica Flores ChicanaAún no hay calificaciones
- Guia de Ejercicios GasesDocumento2 páginasGuia de Ejercicios GasesVeronica Yoko MoralesAún no hay calificaciones
- SGC-PRT-501.005 Procedimiento Perforación Diamantina Rev A1Documento9 páginasSGC-PRT-501.005 Procedimiento Perforación Diamantina Rev A1gonzaloAún no hay calificaciones
- 5.2.2 - 5.2.3 Control y TecnicasDocumento3 páginas5.2.2 - 5.2.3 Control y TecnicasJavier Lara FloresAún no hay calificaciones
- Planificación Matemática 5° básico, NúmerosDocumento3 páginasPlanificación Matemática 5° básico, NúmerospianancyAún no hay calificaciones
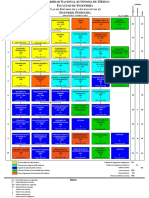
- Mapa Curricular Ing. Petrolera UNAMDocumento2 páginasMapa Curricular Ing. Petrolera UNAMGustavo Ramirez AriasAún no hay calificaciones
- Silabo de Matematica y TrigonometriaDocumento37 páginasSilabo de Matematica y TrigonometriaVILLACIS ORQUERA RENE DAVIDAún no hay calificaciones
- Diapositiva de Conservacion de La EnergiaDocumento9 páginasDiapositiva de Conservacion de La EnergiaEDINSONAún no hay calificaciones
- Documento Sin TítuloDocumento2 páginasDocumento Sin TítuloJairo Ortiz MorenoAún no hay calificaciones
- Aislopanel: Ficha técnica de panel aislante para conservación y congelaciónDocumento1 páginaAislopanel: Ficha técnica de panel aislante para conservación y congelaciónVanessa RomeroAún no hay calificaciones
- Apendice C (Graficas Dinamicas Columnas)Documento27 páginasApendice C (Graficas Dinamicas Columnas)Edd FdezAún no hay calificaciones
- Probl Cap 3 Induccion en ArmaduraDocumento9 páginasProbl Cap 3 Induccion en ArmaduranelsonAún no hay calificaciones
- Tesis Redes NeuronalesDocumento489 páginasTesis Redes NeuronalesMario Edgar Pèrez PinalAún no hay calificaciones
- Elementos Básicos y MRUDocumento6 páginasElementos Básicos y MRUDanilo Pánchez50% (2)
- Determinacion de La Vida Util de Ajo en Polvo Mediante Pruebas Aceleradas Aslt Tesis 1997Documento119 páginasDeterminacion de La Vida Util de Ajo en Polvo Mediante Pruebas Aceleradas Aslt Tesis 1997Henry E. GonzalezAún no hay calificaciones
- Prueba de EsfuerzoDocumento4 páginasPrueba de EsfuerzoMaria Alejandra Arevalo MatinezAún no hay calificaciones