También podría gustarte
- MathsBookPart1 PDFDocumento195 páginasMathsBookPart1 PDFSarahAún no hay calificaciones
- Multilinear Algebra - MITDocumento141 páginasMultilinear Algebra - MITasdAún no hay calificaciones
- WEEK 5 - Vector Space, SubspaceDocumento28 páginasWEEK 5 - Vector Space, Subspacemira_stargirlsAún no hay calificaciones
- Notes Mich14 PDFDocumento97 páginasNotes Mich14 PDFCristianaAún no hay calificaciones
- Vectors and TensorsDocumento13 páginasVectors and TensorsNithinAún no hay calificaciones
- Numerical Methods in Sci and EngDocumento109 páginasNumerical Methods in Sci and EngAshokan KelothAún no hay calificaciones
- Introduction To Continuum Mechanics Lecture Notes: Jagan M. PadbidriDocumento33 páginasIntroduction To Continuum Mechanics Lecture Notes: Jagan M. Padbidrivishnu rajuAún no hay calificaciones
- Introduction To Continuum Mechanics Lecture Notes: Jagan M. PadbidriDocumento33 páginasIntroduction To Continuum Mechanics Lecture Notes: Jagan M. PadbidriManoj RajAún no hay calificaciones
- Applied 2Documento10 páginasApplied 2said2050Aún no hay calificaciones
- Orthogonal Functions: 3.1 VectorsDocumento10 páginasOrthogonal Functions: 3.1 VectorsbbteenagerAún no hay calificaciones
- Vector SpacesDocumento16 páginasVector SpacesRaulAún no hay calificaciones
- 1 Scalars and Vectors: 1.1 What Is A Vector?Documento9 páginas1 Scalars and Vectors: 1.1 What Is A Vector?Rishi ScifreakAún no hay calificaciones
- Continuum Mechanics - TensorsDocumento12 páginasContinuum Mechanics - TensorsBrian WoodAún no hay calificaciones
- Cross ProductDocumento6 páginasCross ProductEthan CostaAún no hay calificaciones
- 0 Short Review of Some Mathematics, Nomenclature and NotationDocumento14 páginas0 Short Review of Some Mathematics, Nomenclature and NotationWong Zam MingYinAún no hay calificaciones
- Vectors - 3.1, 3.2, 3.3, 3.4, 3.5Documento70 páginasVectors - 3.1, 3.2, 3.3, 3.4, 3.5Bryan PenfoundAún no hay calificaciones
- Chapter 7 - Geometry of Lines and Planes: 7.1 - IntroductionDocumento4 páginasChapter 7 - Geometry of Lines and Planes: 7.1 - IntroductionLexAún no hay calificaciones
- First Test Answers Math 130 Linear AlgebraDocumento3 páginasFirst Test Answers Math 130 Linear AlgebraCody SageAún no hay calificaciones
- Notas de Algebrita PDFDocumento69 páginasNotas de Algebrita PDFFidelHuamanAlarconAún no hay calificaciones
- L9 Vectors in SpaceDocumento4 páginasL9 Vectors in SpaceKhmer ChamAún no hay calificaciones
- ReportDocumento8 páginasReportJunrel J Lasib DabiAún no hay calificaciones
- Lecture 1 - NewDocumento8 páginasLecture 1 - NewFares FathyAún no hay calificaciones
- Multivariable Calculus Math 21a: Harvard University Spring 2004 Oliver KnillDocumento64 páginasMultivariable Calculus Math 21a: Harvard University Spring 2004 Oliver KnillTshegofatso Shroedinger TshipmaticAún no hay calificaciones
- Chapter5 (5 1 5 3)Documento68 páginasChapter5 (5 1 5 3)Rezif SugandiAún no hay calificaciones
- Feeg2003 L12Documento7 páginasFeeg2003 L12jiales225Aún no hay calificaciones
- MA1513 Chapter 2 Lecture NoteDocumento40 páginasMA1513 Chapter 2 Lecture NoteJustin NgAún no hay calificaciones
- LinAlg Part2ADocumento27 páginasLinAlg Part2AscribddownloadedAún no hay calificaciones
- Linear Algebra Assignment HelpDocumento14 páginasLinear Algebra Assignment Helpmathsassignmenthelp100% (1)
- KKP Mte 3110 - 3Documento56 páginasKKP Mte 3110 - 3Siti Khirnie KasbolahAún no hay calificaciones
- Geometry in Space and Vectors: The Cross ProductDocumento11 páginasGeometry in Space and Vectors: The Cross ProductAgus Ahmad RizqiAún no hay calificaciones
- 1 Scalars and Vectors: 1.1 What Is A Vector?Documento11 páginas1 Scalars and Vectors: 1.1 What Is A Vector?anupam10311Aún no hay calificaciones
- Appendix 1Documento4 páginasAppendix 1Priyatham GangapatnamAún no hay calificaciones
- ProjectionsDocumento9 páginasProjectionsDuaa Al-HasanAún no hay calificaciones
- Chapter 2Documento35 páginasChapter 2Jihan KwonAún no hay calificaciones
- Special Relativity in The Affine SpacetimeDocumento8 páginasSpecial Relativity in The Affine SpacetimeMichael YuAún no hay calificaciones
- 6 Gram-Schmidt Procedure, QR-factorization, Orthog-Onal Projections, Least SquareDocumento13 páginas6 Gram-Schmidt Procedure, QR-factorization, Orthog-Onal Projections, Least SquareAna Paula RomeiraAún no hay calificaciones
- Matrices & Linear Algebra: Vector SpacesDocumento20 páginasMatrices & Linear Algebra: Vector SpacesFelipe López GarduzaAún no hay calificaciones
- Cal133 Multiplication of Vectors The Scalar or Dot ProductDocumento7 páginasCal133 Multiplication of Vectors The Scalar or Dot Productmarchelo_cheloAún no hay calificaciones
- LA Notes CompleteDocumento36 páginasLA Notes CompleteShiyeng CharmaineAún no hay calificaciones
- 1 Schaums Outline of L PDFDocumento45 páginas1 Schaums Outline of L PDFAnonymous SA1rs3KWAún no hay calificaciones
- Lecture13 AuroraDocumento9 páginasLecture13 Auroramartin701107Aún no hay calificaciones
- Topic 5 Linear Combination Linear Dependence Spanning, Orthogonal-WordDocumento12 páginasTopic 5 Linear Combination Linear Dependence Spanning, Orthogonal-Wordwendykuria3Aún no hay calificaciones
- Unit 2: 1. Mathematical Foundations and Learning MechanismsDocumento26 páginasUnit 2: 1. Mathematical Foundations and Learning Mechanismsjai geraAún no hay calificaciones
- 3-D Geometry NotesDocumento7 páginas3-D Geometry NotesJohn KimaniAún no hay calificaciones
- Linear AlgebraDocumento18 páginasLinear AlgebraT BlackAún no hay calificaciones
- The Vector Product: 6.1 Parallel VectorsDocumento6 páginasThe Vector Product: 6.1 Parallel VectorsParveen SharmaAún no hay calificaciones
- Conditional ExpectationDocumento33 páginasConditional ExpectationOsama HassanAún no hay calificaciones
- The Dot ProductDocumento4 páginasThe Dot ProductKate NaybeAún no hay calificaciones
- ContinuumMechanicsV1 7Documento89 páginasContinuumMechanicsV1 7Umair IsmailAún no hay calificaciones
- LADE11 General Vector SpacesDocumento21 páginasLADE11 General Vector SpacesRoumen GuhaAún no hay calificaciones
- Linear Algebra NotesDocumento36 páginasLinear Algebra Notesdeletia666Aún no hay calificaciones
- 3195 Study VsDocumento6 páginas3195 Study VsBrik ZivkovichAún no hay calificaciones
- Hand Out FiveDocumento9 páginasHand Out FivePradeep RajasekeranAún no hay calificaciones
- Chapter 8: VectorsDocumento5 páginasChapter 8: Vectorsrohitrgt4uAún no hay calificaciones
- Mathematical Methods of PhysicsDocumento70 páginasMathematical Methods of Physicsaxva1663Aún no hay calificaciones
- 2 - Mathematical PreliminariesDocumento27 páginas2 - Mathematical PreliminariesBhavana BollarapuAún no hay calificaciones
- M Tech NotesDocumento32 páginasM Tech NotesNikhil SinghAún no hay calificaciones
- Linear Algebra and Matrix Analysis: Vector SpacesDocumento19 páginasLinear Algebra and Matrix Analysis: Vector SpacesShweta SridharAún no hay calificaciones
- 10.4 The Cross ProductDocumento8 páginas10.4 The Cross ProductNadine BadawiyehAún no hay calificaciones
- MAT125 FinalDocumento36 páginasMAT125 FinalLionel AsifAún no hay calificaciones
- 2 StatesDocumento10 páginas2 StatesVinayak DuttaAún no hay calificaciones
- Master the Fundamentals of Electromagnetism and EM-InductionDe EverandMaster the Fundamentals of Electromagnetism and EM-InductionAún no hay calificaciones
- An Efficient Determination of PiDocumento7 páginasAn Efficient Determination of PijeamichelAún no hay calificaciones
- Important Notes of 10th Class Math Exercise 1.3Documento7 páginasImportant Notes of 10th Class Math Exercise 1.3Tayyabah Shah100% (1)
- 2023 Paper 34Documento19 páginas2023 Paper 34creatorb2003Aún no hay calificaciones
- Maths 3Documento2 páginasMaths 3api-296698256Aún no hay calificaciones
- Eco 415Documento163 páginasEco 415OLUWAGBOTEMI SANUSIAún no hay calificaciones
- Sova and BCJRDocumento18 páginasSova and BCJRsinne4Aún no hay calificaciones
- Ch-3 RD MathsDocumento112 páginasCh-3 RD MathsThe VRAJ GAMESAún no hay calificaciones
- X13 PermutationsDocumento20 páginasX13 PermutationsIvan kayle BatistinAún no hay calificaciones
- 2012SCIMAGArith GeoDocumento137 páginas2012SCIMAGArith Geowill bAún no hay calificaciones
- Reservoir Sizing & Storage Yield Reservoir Sizing: Mass Diagram MethodDocumento3 páginasReservoir Sizing & Storage Yield Reservoir Sizing: Mass Diagram MethodkatoAún no hay calificaciones
- SMA 1117 - Lec 1Documento37 páginasSMA 1117 - Lec 1LucasAún no hay calificaciones
- Lecture 2 & 3 Unit Commitment and ELDDocumento42 páginasLecture 2 & 3 Unit Commitment and ELDSantosh ThapaAún no hay calificaciones
- Axiomatic SystemsDocumento22 páginasAxiomatic SystemsNarain K ReddyAún no hay calificaciones
- MCV4U Homework GuideDocumento8 páginasMCV4U Homework GuideChristian KapsalesAún no hay calificaciones
- Specific Objectives: Age ProblemsDocumento6 páginasSpecific Objectives: Age ProblemsJoams artsAún no hay calificaciones
- F2 2016 MayDocumento17 páginasF2 2016 Maydawnlau73Aún no hay calificaciones
- GATE - CS - Engineering MathematicsDocumento33 páginasGATE - CS - Engineering Mathematicsvipi143Aún no hay calificaciones
- Os Process Scheduling AlgorithmsDocumento4 páginasOs Process Scheduling AlgorithmstossAún no hay calificaciones
- Mathtest 2020 BDocumento7 páginasMathtest 2020 Byanikwendu1Aún no hay calificaciones
- STL2Documento13 páginasSTL2Romee PanchalAún no hay calificaciones
- NDA Previous Year Questions BINOMIAL THEOREMDocumento46 páginasNDA Previous Year Questions BINOMIAL THEOREMRaman ChoubayAún no hay calificaciones
- 3 - Vector SpacesDocumento143 páginas3 - Vector SpacesnhưAún no hay calificaciones
- Fortran Sub Programs Elliptic IntegralDocumento24 páginasFortran Sub Programs Elliptic Integralbefana63Aún no hay calificaciones
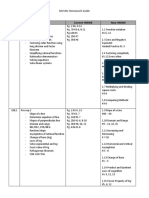
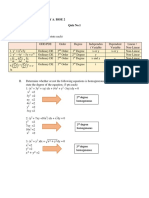
- Ruizo, Charlene Joy A. Bsse 2 Math 121 (Quiz No.1)Documento5 páginasRuizo, Charlene Joy A. Bsse 2 Math 121 (Quiz No.1)Charlene Joy RuizoAún no hay calificaciones
- Chapter1 ALA-handoutDocumento88 páginasChapter1 ALA-handouthong thaoAún no hay calificaciones
- Inverse FunctionsDocumento1 páginaInverse FunctionsDerren Nierras Gaylo100% (1)