Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Teoria Basica PLC
Cargado por
Kike ZCDerechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Teoria Basica PLC
Cargado por
Kike ZCCopyright:
Formatos disponibles
UNIVERSIDAD VERACRUZANA
FACULTAD DE INGENIERIA MECANICA ELECTRICA
ZONA POZA RICA -TUXPAN
TEORIA BASICA DE
LOS DISPOSITIVOS PLCs
MONOGRAFIA
PARA OBTENER EL TITULO DE
INGENIERO MECANICO ELECTRICISTA
PRESENTA
IVAN CASTAN HERNANDEZ
DIRECTOR DEL TRABAJO RECEPCIONAL
ING. GABRIEL JUREZ MORALES
POZA RICA DE HIDALGO, VERACRUZ.
2002.
Gracias Dios Padre
Por las bendiciones recibidas
Por permitirme llegar al final
Del principio de mi vida profesional
Por dar fuerza a mi espritu y alma
Por saciar mi mpetu y aoranza
Por la vida y salud otorgada
Pero principalmente gracias
Por estos grandes padres y mi hermana
Por familiares y amigos que me acompaan
A mis padres doy gracias
Por ayudarme a dar este importante paso
Por el ejemplo de vida que me han dado
Por la paciencia y tolerancia que me han brindado
Por ayudarme a levantarme cuando estoy derrumbado
Por ser el pilar principal en mi crecimiento
Gracias les doy a mis padres y mi hermana
Por estar conmigo en las buenas y en las malas
Creer y confiar siempre en la realizacin de mis metas
Gracias a mis familiares y amigos
Por su apoyo y confianza
Por una sonrisa y una palmada
Por darme nimo y descanso
Para retomar con fuerza el camino
An la noche mas obscura tiene un claro amanecer
Por encima de las nubes mas densas sigue brillando el sol
Todo ro tiene dos orillas.
Ivan
Monografa
Teora bsica de los PLC.
INTRODUCCIN.
Los controladores lgicos programables (PLC, por sus siglas en ingls) , son
dispositivos electrnicos digitales que fueron investigados en la dcada de los 60s para
reemplazar a los relevadores electromecnicos, interruptores y otros componentes
comnmente utilizados para el control de sistemas combinacional .
En los sistemas de lgica combinacional, el estado de una salida queda determinado
por el estado de cierta combinacin de entradas sin importar la historias de estas .
De este modo, los PLCs resultaron muy atractivos ya que, a diferencia de los antiguos
circuitos permiten reprogramacin, ocupan comparativamente muy poco espacio,
consumen poca potencia, poseen auto-diagnstico y tienen un costo competitivo,
adems, los PLCs pueden realizar operaciones aritmticas, manipulaciones complejas
de datos, tienen mayores capacidades de almacenamiento y pueden comunicarse ms
eficientemente con el programador y con otras computadoras en redes de rea local.
Asimismo, ahora muchos PLCs incorporan instrucciones y mdulos para manejar
seales analgicas y para realizar estrategias de control, ms sofisticados que el
simple ON OF , tales como el control PID, inclusive con mltiples procesadores .
As, dada la importancia que implica el conocimiento actual de estos dispositivos , en el
presente trabajo se pretende proporcionar al estudiante de la carrera de Ingeniera
Mecnica Elctrica y especficamente al rea de control, un material que le permita ser
de apoyo , consulta y estudio sobre la Teora Bsica
de los PLCs
en sus
fundamentos y principios de diseo dentro de su operacin bsica.
Facultad de ingeniera Mecnica Elctrica
Monografa
Teora bsica de los PLC.
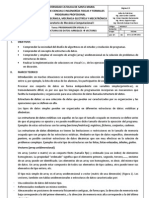
CAPITULO I
JUSTIFICACIN.
La tecnologa constantemente presenta avances y cambios, procesos que pueden
observarse en la industria, en la empresa y en el mbito profesional, por ello, el
estudiante de ingeniera siempre debe tratar de estar a la vanguardia para no quedarse
rezagado dentro del campo de estudio y trabajo.
Aqu, el Area de la Ingeniera
Mecnica Elctrica no es la excepcin, todos los
sistemas actuales de control que presentan dentro de la industria un campo fuerte de
trabajo se mueven y controlan a base de dispositivos modernos y tecnolgicos que
estn diseados a base de circuitos electrnicos y sistemas programados.
De esto se origina la necesidad de realizar un trabajo profesional que permita
proporcionar al estudiante los fundamentos bsicos para su conocimiento e integracin
profesional en est rea extensa de diseo y trabajo.
NATURALEZA, SENTIDO Y ALCANCE DEL TRABAJO.
NATURALEZA.
Un Controlador Lgico Programable (PLC) o Autmata Programable Industrial ( API ) es
una mquina electrnica diseada para trabajar en entornos industriales
controlando procesos secuenciales en tiempo real. Su velocidad de ejecucin debe
ser lo suficientemente elevada como para permitir el control de un proceso en tiempo
real; debe ser programable y su lenguaje de programacin sencillo y asequible.
SENTIDO.
Antes, los sistemas industriales de control, se basaban en sistemas lgicos de
transistores, que cumplan con todas las caractersticas que todo usuario espera:
seguridad, confiabilidad, rapidez y economa, sin embargo presentaban el
Facultad de ingeniera Mecnica Elctrica
Monografa
Teora bsica de los PLC.
inconveniente de ser difciles de modificar en su configuracin, tales cambios
son
fsicos que van de cableado, conexiones, hasta arreglo de pistas.
Por estas razones, se necesitaba otra forma para controlar procesos industriales con
ms eficiencia; es por eso que se acude a un nuevo enfoque que consiste en que la
toma de decisiones del sistema se lleva a cabo por instrucciones codificadas las cuales
estn almacenadas en un circuito de memoria y ejecutadas por un Microprocesador,
esto quiere decir, si se quiere cambiar el sistema de control basta con cambiar las
instrucciones
codificadas y esto se logra haciendo cambios con un software o
programa por medio de un teclado.
ALCANCE DEL TRABAJO.
De manera general el presente trabajo en su calidad de Monografa consiste en
presentar un trabajo de recopilacin y comprensin sobre el funcionamiento de los
PLCs, de tal modo que esto permita al
estudiante poder tener los fundamentos
tericos de diseo de todo un set de mdulos con entradas anlogas y digitales.
ENUNCIACIN DEL TEMA.
Los PLCs pueden realizar operaciones aritmticas, manipulaciones complejas de
datos, tienen mayor capacidad de almacenamiento y pueden comunicarse ms
eficientemente con el programador y con otros controladores y computadoras en red.
Adems, en la actualidad muchos PLCs incorporan instrucciones y mdulos para
manejar seales anlogas as mismo para realizar estrategias de control, ms
sofisticados que el simple ON-OFF.
EXPLICACIN DE LA ESTRUCTURA DEL TRABAJO.
El presente trabajo se estructura de la siguiente forma:
Realizar la consulta de bibliografas que complementen el tema en referencia.
Realizar el acceso a pginas de Internet que permitan contribuir a la recopilacin
de informacin.
Facultad de ingeniera Mecnica Elctrica
Monografa
Teora bsica de los PLC.
Revisar artculos y documentos que presenten informacin sobre el tema.
De la informacin recopilada, realizar una seleccin acorde a las necesidades del
tema.
La informacin seleccionada se estructura con un criterio propio de organizacin
y definicin.
La informacin seleccionada y organizada se transferir al proceso de redaccin
y diseo.
Promover los ajustes, modificaciones y/o cambios necesarios en el proceso de
revisin.
Facultad de ingeniera Mecnica Elctrica
Monografa
Teora bsica de los PLC.
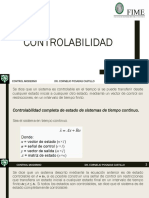
CAPITULO II
DESARROLLO DEL TEMA
MARCO CONTEXTUAL
El autmata programable (PLC) es el componente que en un cuadro elctrico nos
permite elaborar y modificar las funciones que tradicionalmente se han realizado con
rels, contactores, temporizadores, etc. En el mercado existen muchos autmatas que
se adaptan a casi todas las necesidades, con entradas/salidas digitales y/o analgicas,
pequeos y grandes. La programacin suele ser sencilla, dependiendo bsicamente de
lo que se pretenda conseguir. A pesar de poder utilizar en cada uno de los distintos
lenguajes de programacin la misma simbologa (esquema de contactos) no es fcil,
aprendiendo uno de ellos, saber manejar el de cualquier otro fabricante ya que es aqu
donde radica el gran inconveniente, cada fabricante tiene su propio lenguaje de
programacin. Lo importante es conocer las posibilidades de un PLC y saber como
llevarlas a la prctica con cualquiera de los autmatas que existen en el mercado.
Es fcil pensar en los controladores programables como en computadoras industriales
especialmente diseados para la realizacin de tareas de control de sistemas
(procesos, autmatas, etc.).
Sin embargo, actualmente los controladores lgicos programables, son dispositivos de
estado slido con la capacidad de almacenar instrucciones para implementar funciones
de control.
Razn a lo expuesto, resulta importante destacar las innovaciones actuales
tecnolgicas con microprocesadores y memorias lo que ha venido a constituirlos en
dispositivos ms verstiles, populares y confiables dentro de la industria del control.
El presente trabajo se realiza bajo un contexto temtico desarrollado de modo tcnico y
factible para cualquier estudiante, enfocando a los aspectos bsicos de diseo y
operacin de los PLCs que son de mucha utilidad dentro de la Industria de la ingeniera
Facultad de ingeniera Mecnica Elctrica
Monografa
Teora bsica de los PLC.
MARCO TEORICO
SUB-TEMA 1.-CONCEPTOS GENERALES
1.1.- Historia de los Controladores Programables.
Los Autmatas Programables Industriales, API, conocidos por PLC's se introdujeron por
primera vez en 1960 aproximadamente, la razn principal de tal hecho fue la necesidad
de eliminar el gran costo que se produca al reemplazar un complejo sistema de control
basado en rels y contactos (lgica cableada).
La Compaa
Bedford Associates propuso el primer Controlador Digital Modular
(MODICON, MOdular DIgital CONtroler) a un gran fabricante de automviles, as como
otras propusieron a la vez esquemas basados en ordenador, as el MODICON 084
result ser el primer PLC del mundo en producirse comercialmente.
El problema con los rels se present cuando por requerimientos de la produccin
cambiaban y con ello tambin se tena que realizar el sistema de control, de tal manera
que esto se torn bastante frecuente y, sobre todo, con un costo muy elevado.
Por otra parte, a veces se deban realizar conexiones entre cientos e incluso miles de
rels, lo que implicaba un enorme esfuerzo de diseo y mantenimiento, razn a esto,
los nuevos controladores deban ser fcilmente programables de tal forma que el
tiempo de vida tcnica til deba de ser largo y los cambios a realizar en el programa
tenan que realizarse de forma sencilla; aqu naci entonces el concepto de LGICA
PROGRAMADA. La solucin aportada fue el empleo de una tcnica de programacin
que result sencilla, reemplazndose as los rels mecnicos por los rels de estado
slido.
Los microprocesadores convencionales cedieron la potencia necesaria para resolver de
forma rpida y completa la lgica de los pequeos PLC's de tal modo que por cada
modelo de microprocesador haba un modelo de PLC basado en el mismo, as, las
grandes oportunidades de las comunicaciones, entre PLC's, comenzaron a presentarse
en el ao de 1973 aproximadamente.
Facultad de ingeniera Mecnica Elctrica
Monografa
Teora bsica de los PLC.
El primer sistema fue el Modbus donde el PLC poda ahora dialogar con otros PLC's y
en conjunto podan estar aislados de las mquinas que controlaban; haba nacido el
concepto de Control Distribuido, adems, podan enviar y recibir seales de tensin
variable y de corriente, entrndose as en el mundo del tratamiento de las seales
analgicas (FUE LA DCADA DE ORO PARA LOS AUTMATAS PROGRAMABLES).
En la actualidad, la tecnologa de los PLCs ha avanzado en gran medida hasta
aproximarse cada vez ms cerca al mundo autmata.
1.2.- Introduccin a los Sistemas Numricos.
Un sistema numrico es una representacin de cantidad o valor correspondiente a un
elemento de informacin discreto, aqu se tienen variados tipos de sistemas numricos,
sin embargo, todos ellos, permiten mostrar e interpretar procesos analgicos y lgicos.
Los sistemas numricos que se tratan en este trabajo son: El sistema numrico
Decimal, Binario, Octal y Hexadecimal.
1.2.1-Sistema numrico Decimal.
El sistema de nmeros decimales se dice que es de base o raz 10 debido a que usa
diez dgitos y los coeficientes se multiplican por potencias de10, normalmente este
sistema es el ms comn y por ello el ms empleado por todo usuario que maneja
datos de tipo numrico, este sistema numrico comprende los dgitos:
0,1, 2, 3, 4, 5, 6, 7, 8, 9
con estos dgitos es posible representar cantidades numricas compuestas, por
ejemplo: 128, 1040, 12340, etc., dando margen adems que con los mismos pueden
realizarse operaciones aritmticas. Ahora, cuando se habla de datos numricos de
acceso a un sistema de control manipulado por un sistema digital la informacin se
maneja en modo decimal de tal forma que estos nmeros decimales de entrada se
almacenan internamente en la computadora mediante un cdigo decimal.Es importante
destacar que los nmeros decimales se convierten en binarios cuando las operaciones
aritmticas se hacen de manera interna con nmeros representados en binario.
Facultad de ingeniera Mecnica Elctrica
Monografa
Teora bsica de los PLC.
1.2.2.- Sistema numrico Binario.
Una computadora digital manipula elementos discretos de informacin, elementos que
se representan en forma binaria. El procesamiento de datos se lleva a cabo entonces
mediante elementos lgicos binarios que utilizan estas seales de tal manera que las
cantidades se almacenan en elementos denominados celdas de almacenamiento
binario, as, el sistema binario tienen dos valores posibles: 0 y 1, donde cada
coeficiente aj se multiplica por 2j.
Por ejemplo, el equivalente decimal del nmero binario 11010.11 es 26.75, como se
muestra por la multiplicacin de los coeficientes por potencias de 2:
1x24+1x23+0x22+1x21+0x20+1x2-1+1x2-2 =26.75
1.2.3.- Sistema Hexadecimal.
El sistema numrico Hexadecimal juega una parte importante en las computadoras
digitales ya que 24=16 es decir, cada dgito hexadecimal corresponde a cuatro dgitos
binarios, la tabla siguiente presenta los equivalentes del sistema numrico decimal,
binario y hexadecimal :
Decimal
(Base 10)
00
01
02
03
04
05
06
07
08
09
10
11
12
13
14
15
Binario
(Base 2)
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
1010
1011
1100
1101
1110
1111
Hexadecimal
(Base 16)
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
Tabla 1.1.-Nmeros con bases diferentes (equivalentes)
Facultad de ingeniera Mecnica Elctrica
Monografa
Teora bsica de los PLC.
como se observa en esta tabla, los nmeros binarios son difciles de trabajar ya que
requieren tres o cuatro veces ms dgitos que su equivalente decimal, ejemplo:
El nmero binario 111111111111 es equivalente al decimal 4095.
Este sistema numrico permite que en las computadoras se reduzca l numero de
dgitos que deben considerarse, ya que emplea la relacin entre el sistema de nmeros
binarios y el hexadecimal, se piensa as en trminos de nmeros Hexadecimales y se
lleva a cabo la conversin
requerida por inspeccin, esto cuando es necesaria la
comunicacin directa con la mquina, ejemplo:
El nmero binario 111111111111 contiene doce dgitos y en Hexadecimal se expresa
como FFF (tres dgitos).
As, durante la comunicacin entre personas con respecto a los nmeros binarios en la
computadora, la representacin en el sistema numrico hexadecimal es ms deseable
debido a que puede expresarse en forma compacta con un tercio o un cuarto del
nmero de dgitos requeridos por el nmero binario equivalente.
Ahora, cuando el humano se comunica con las mquinas (a travs de interruptores en
la consola con luces indicadoras, o mediante programas escritos en lenguaje de
mquina), la conversin de hexadecimal a binario y viceversa se hace por inspeccin
por el usuario.
1.3.- Cdigos Binarios.
Los sistemas electrnicos digitales utilizan seales que tienen dos valores distintos y
elementos de circuito que tienen dos estados estables, se determina aqu que existe
una analoga directa entre las seales binarias, los elementos de circuito binario y un
dgito binario, se tiene por ejemplo que un nmero binario de n dgitos, puede
representarse por n elementos de nmeros binarios, cada uno con una seal de salida
equivalente a 0 o a 1.
Asimismo, los sistemas digitales representan y manipulan no slo nmeros binarios,
sino tambin otros muchos elementos discretos de informacin.
Cualquier elemento discreto de informacin distinto entre un grupo de cantidades puede
representarse por un cdigo binario, ejemplo:
Facultad de ingeniera Mecnica Elctrica
Monografa
Teora bsica de los PLC.
El rojo es un color definido del espectro.
La letra A es una letra distinta del alfabeto.
Un BIT, por definicin, es un dgito binario y cuando se usa junto con un cdigo binario,
es mejor considerarlo como si se denotara una cantidad binaria igual a 0 o 1.
Para representar un grupo de 2n elementos distintos en un cdigo binario, se requiere
un mnimo de n bits, esto se debe a que es posible ordenar n bits en 2 n formas
distintas.
Por ejemplo, un grupo de cuatro cantidades diferentes puede representarse mediante
un cdigo de 2 bits, con cada cantidad asignada a una de las siguientes combinaciones
de BIT: 00, 01,10, 11, as un grupo de ocho elementos requiere de un cdigo de tres
bits, con cada elemento asignado a uno y slo uno de los siguientes:
000,001,010,011,100, 101,110,111.
En los ejemplos se muestra que las distintas combinaciones de bits para un cdigo de n
bits pueden encontrarse al contar en binario desde 0 a (2n-1).
Algunas combinaciones de BIT quedan sin asignarse cuando el nmero de elementos
del grupo que va a modificarse no es un mltiplo de la potencia de 2. Los diez dgitos
decimales 0,1,2,....9 son un ejemplo de tal clase de grupo. Un cdigo binario que se
distingue entre diez elementos debe de contener cuando menos cuatro bits; tres bits
pueden distinguir un mximo de ocho elementos.
Aunque el nmero mnimo de bits necesario para codificar 2 n cantidades distintas es n,
no hay numero mximo de bits que puedan usarse para un cdigo binario. Por ejemplo,
los diez dgitos decimales pueden codificarse con diez bits y, cada dgito decimal se
asigna a una combinacin de bits de nueve nmeros 0 y un 1.
En este cdigo binario particular, al digito 6 se le asigna la combinacin de bits
0001000000.
1.4.- Operadores lgicos AND, OR, NOT.
Los circuitos digitales electrnicos tambin se denominan circuitos lgicos ya que, con
la entrada apropiada, establecen trayectorias lgicas de manipulacin de seales.
Facultad de ingeniera Mecnica Elctrica
10
Monografa
Teora bsica de los PLC.
Cualquier informacin que se dese para control puede operarse por el paso de
seales binarias a travs de diversas combinaciones de circuitos lgicos, cada seal
representa una variable y lleva un BIT de informacin.
Los circuitos de la figura 1.2 presentan esta lgica binaria:
Los circuitos Lgicos que realizan las operaciones Lgicas de AND, OR, y NOT se
muestra con sus smbolos en la figura 1.3.
Estos circuitos, llamados compuertas, son bloques de hardware que producen una
seal de salida lgica 1 o lgica 0 esto conforme a la seal de entrada lgica.
Las seales de entrada x y y en las dos compuertas de entrada en la figura anterior
pueden existir en uno de cuatro estados posibles: 00, 10, 11, 01.
Estas seales de entrada se muestran en la figura 1.4.
Los diagramas denominados de tiempo en la figura anterior ilustran la respuesta de
cada circuito a cada una de las cuatro combinaciones binarias de entrada posibles.
La razn del nombre inversor par la compuerta NOT es aparente por la comparacin
de la seal x (entrada del inversor) y la de x(salida del inversor).
Las compuertas AND y OR pueden tener ms de dos entradas como se tiene en la
figura 3, aqu la compuerta de tres entradas AND responde con una salida lgica 1 si
todas las tres seales de entrada son de lgica 1 y la salida produce una seal de
lgica 0 si cualquier entrada es lgica 0.
En el caso de las cuatro entradas en la compuerta OR responden con una lgica 1
cuando cualquier entrada es lgica 1 y su salida llega a ser lgica 0 si todas las seales
de entrada son lgica 0.
El sistema matemtico de la lgica binaria es mejor conocido como lgebra Booleana.
Esta lgebra se usa en forma conveniente para describir la operacin de redes
complejas de circuitos digitales.
Facultad de ingeniera Mecnica Elctrica
11
Monografa
Teora bsica de los PLC.
B
Fuente de
voltaje
Fuente de
voltaje
(a) Interruptores en serie-lgica AND
b) Interruptores en paralelo-lgica OR
Figura 1.2.- Circuitos a base de interruptores que demuestran la lgica binaria.
Z=x*y
Z=x+y
(a) compuerta AND de
dos entradas.
( c ) compuerta NOT
o inversora.
( b ) compuerta OR
de dos entradas
A
B
C
D
A
B
C
G=A+B+C+D
( e ) Compuerta OR de
cuatro entradas
( d ) Compuerta AND
de tres entradas.
S=ABC
Figura 1.3.-Smbolos para los circuitos digitales lgicos.
0
0
AND : x y
OR : x + y
NOT : x
Figura 1.4.- Seales de entrada-salida para las compuertas (a), (b) y (c)
Facultad de ingeniera Mecnica Elctrica
12
Monografa
Teora bsica de los PLC.
1.5.- Principios del lgebra Booleana.
El lgebra booleana, como cualquier otro sistema matemtico deductivo se define como
un conjunto de elementos, un conjunto de operadores y un nmero de axiomas no
probados o postulados.
Es importante considerar que un conjunto de elementos es cualquier coleccin de
objetos que tienen una prioridad comn, ejemplo:
Si S es un conjunto y, x y y son ciertos objetos, entonces xS denota que x es un
miembro del conjunto S y, yS denota que y no es un elemento de S.
As, un conjunto con un nmero de elementos se especifica por llaves: A =1,2,3,4
esto es, los elementos del conjunto A son los nmeros 1,2,3 y 4.
Entonces, en el caso de un operador binario definido en un conjunto S de elementos es
una regla que asigna a cada par de elementos de S un elemento nico de S, como
ejemplo, considrese:
La relacin ab = c, Se dice que es un operador binario y especifica una regla para
encontrar c mediante el par (a,b) y tambin si a,b,c S.
Sin embargo, * no es un operador binario si a, b S.Si la regla encuentra que c S.
As, los postulados de un sistema matemtico forman los supuestos bsicos mediante
los cuales es posibles deducir las reglas, teoremas y propiedades del sistema.
En 1854 George Boole introdujo un tratamiento sistemtico de la lgica y desarroll
para este propsito un sistema algebraico que ahora se conoce como lgebra booleana
sin embargo, para la definicin formal del lgebra booleana, se emplean los postulados
formulados por E. V. Huntington en 1904 los cuales son:
1. (a) Cierre con respecto al operador (+)
(b) Cierre con respecto al operador ()
2. (a) Un elemento identidad con respecto a +, designado por 0: x + 0 = 0 + x = x.
(b) Un elemento identidad con respecto a , designado por 1:x . 1 x = x.
Facultad de ingeniera Mecnica Elctrica
13
Monografa
Teora bsica de los PLC.
3. (a) Conmutativo con respecto a +: x + y = y + x.
(b) conmutativo con respecto a : x y = y x.
4. (a) es distributivo sobre +: x (y + z) = (x y)+ (xz).
(b) + es distributivo sobre : x + (y z) = (x + y) (x + z).
5. Para cada elemento x B, existe un elemento x B (denominado Complemento
de x) tal que: (a) x + x = 1 y (b) x x =0.
6. Existen cuando menos dos elementos x, y b tales que x y.
Al comparar el lgebra booleana con la aritmtica y el lgebra ordinaria ( el campo de
los nmeros reales), se observan las siguientes diferencias:
1. Los postulados de Huntington no incluyen la ley asociativa. No obstante, esta ley es
vlida para el lgebra booleana y puede derivarse (para ambos operadores)
mediante los otros postulados.
2. La ley distributiva de + sobre , esto es, x + (yz)= (x + y) (x + z), es vlida para el
lgebra booleana, pero no para el lgebra ordinaria.
3. El lgebra booleana no tiene inversas aditiva o multiplicativa; por lo tanto, no hay
operaciones de sustraccin o divisin.
4. El postulado 5 define un operador llamado complemento que no se encuentra en
el lgebra ordinaria.
5. El lgebra ordinaria trata con nmeros reales, los cuales constituyen un conjunto
infinito de elementos. El lgebra booleana trata con el conjunto todava no definido
de elementos B, pero en el lgebra booleana de dos valores que se define ms
adelante ( y de inters en el uso subsecuente de esta lgebra), B se define como un
conjunto con slo dos elementos, 0 y 1.
Estas reglas son exactamente las mismas que las operaciones AND, OR
y NOT,
respectivamente. Los teoremas bsicos del lgebra de Booleana se listan en la tabla
siguiente:
Facultad de ingeniera Mecnica Elctrica
14
Monografa
Teora bsica de los PLC.
Postulado 2
(a) x + 0 =x
(b) x 1 = x
Postulado 5
(a) x + x= 1
(b) x x=0
Teorema 1
(a) x + x = x
(b) x x = x
Teorema 2
(a) x + 1 = 1
(b) x 0 =0
Teorema 3
involucin
(x)= x
Postulado3, conmutativo (a) x + y = y + x
Teorema 4,
(b) x y = y x
asociativo (a) x + (y + z) = (x + y) (b) x (y z) = (x y) z
+z
Postulado4, distributivo (a) x (y + z) = x y + x z
(b) x + y z = (x + y) (x
+ z)
Teorema
5, de De (a) (x + y) = x y
(b) (x y)= x + y
absorcin (a) x + x y = x
(b) x (x +y)= x
Morgan
Teorema 6,
Tabla 1.5.-Postulados y teoremas del lgebra booleana.
Los teoremas y postulados que se listan son las relaciones ms bsicas en el lgebra
booleana, asimismo, los teoremas, al igual que los postulados, se listan en pares;
donde cada relacin es el dual de su pareja.
1.6.- Anlisis de Compuertas lgicas.
Considerando que las funciones booleanas se expresan en trminos de operaciones
AND, OR y NOT, es fcil implantar una funcin booleana con estos tipos de
compuertas. Aqu, los factores que deben considerarse en la construccin de otros
tipos de compuertas lgicas son:
La factibilidad y economa de producir compuertas con componentes fsicos.
Facultad de ingeniera Mecnica Elctrica
15
Monografa
Teora bsica de los PLC.
La posibilidad de extender la compuerta a ms de dos entradas.
Las propiedades bsicas del operador binario como conmutabilidad y asociatividad y
La habilidad para implantar compuertas booleanas solas o con otras compuertas.
En la tabla siguiente se presentan 16 funciones posibles en el diseo de Circuitos
lgicos empleando compuertas digitales:
Funciones
Booleanas
F0 = 0
Smbolo del
Operador
F1 =
F2 =
F3 =
F4 =
F5 =
F6 =
xy
x/y
xy
x y
x
xy
y
x y + xy
F7 = x + y
F8 =(x + y)
F9 = x y + xy
F10 =y
F11 =x + y
F12 =x
F13 =x + y
F14 =(x y )
F15 =1
y/x
Xy
X+y
x y
xy
y
xy
x
xy
x y
Nombre
Comentarios
Nulo
Constante Binaria
0
xyy
x pero no y
X
y pero no x
Y
X o y pero no
ambas
Xoy
NOT-OR
x igual a y
No y
Si y, entonces x
No x
Si x, entonces y
NOT-AND
Constante binaria
1
AND
Inhibicin
Transferencia
Inhibicin
Transferencia
Excluyente-OR
OR
NOR
equivalencia
Complemento
Implicacin
Complemento
Implicacin
NAND
identidad
La equivalencia tambin se conoce como igualdad, coincidencia y excluyente NOR.
Tabla 1.6.- Expresiones booleanas para las 16 funciones de dos variables.
Los smbolos grficos y las tablas de verdad de las ocho compuertas se muestran en la
figura 1.7:
Facultad de ingeniera Mecnica Elctrica
16
Monografa
Teora bsica de los PLC.
Nombre
Smbolo grfico
X
y
AND
OR
A
B
inversor
Funcin grfica
F=xy
X
0
0
1
1
Y
0
1
0
1
F
0
0
0
1
F=x+y
X
0
0
1
1
Y
0
1
0
1
F
0
1
1
1
F = X
F=x
Buffer
NAND
NOR
Excluyente OR
(XOR)
Excluyente NOR
O Equivalente
X
y
X
y
X
y
F = (x y )
F = (x + y)
F = x y + x y = x y
X
y
Tabla de verdad
F = x y + x+ y = x y
X
0
1
F
1
0
X
0
1
F
0
1
X
0
0
1
1
Y
0
1
0
1
F
1
1
1
0
X
0
0
1
1
Y
0
1
0
1
F
1
0
0
0
X
0
0
1
1
Y
0
1
0
1
F
0
1
1
0
X
0
0
1
1
Y
0
1
0
1
F
1
0
0
1
Tabla 1.7.- Compuertas lgicas digitales.
Facultad de ingeniera Mecnica Elctrica
17
Monografa
Teora bsica de los PLC.
Como se observa, cada compuerta tiene una o dos variables binarias de entrada
designadas por x y y y una variable binaria de salida designada por F. El circuito
inversor invierte el sentido lgico de una variable binaria, es decir produce la funcin
NOR o complemento. La funcin NAND es el complemento de la funcin AND como se
indica por un smbolo grfico, que consta de un smbolo grfico AND seguido de un
crculo pequeo. La funcin NOR es el complemento de la funcin OR y se usa un
smbolo grfico OR seguido de un crculo pequeo. Es importante destacar que las
compuertas NAND y NOR se utilizan en forma extensa como compuertas lgicas
estndar y de hecho se emplean ms que las compuertas AND y OR, esto se debe a
dos puntos importantes :
Las compuertas NAND y NOR se construyen fcilmente como circuitos de
transistores
Las funciones booleanas pueden implementarse con sencillez con dichas
compuertas.
La compuerta excluyente-OR tiene un smbolo grfico similar al de la compuerta OR
excepto por la lnea adicional curva en el lado de entrada, ahora , las compuertas que
se muestran en la figura 4, excepto por el inversor y el buffer, pueden extenderse para
tener ms de dos entradas. Las operaciones AND y OR, definidas en el lgebra
booleana, poseen esas dos propiedades. Para la funcin OR se tiene:
X+y=y+x
conmutativa
(x + y) + z = x + (y + z)= x + y + z
asociativa
Esto indica que las entradas de compuerta pueden intercambiarse y que la funcin OR
puede extenderse a tres o ms variables. Las funciones NAND y NOR son
conmutativas y sus compuertas pueden extenderse para tener ms de dos entradas
siempre que se modifique ligeramente la definicin de la operacin.
La dificultad es que los operadores NAND y NOR no son asociativos, esto es, (x y)z
x(y z), como se muestra a continuacin:
(x y)z = [ (x + y)] = (x + y)z = xz+ yz
x(yz) = [ x+ (y + z)]= x(y + z)= xy + xz
Facultad de ingeniera Mecnica Elctrica
18
Monografa
Teora bsica de los PLC.
Esto puede apreciarse adems en la figura 1.8.
Para superar esta dificultad, se define la compuerta mltiple NOR (o NAND) como una
compuerta complementaria OR ( o AND). As por definicin, se tiene:
x y z = (x + y + z)
x y z = (x y z)
Los smbolos grficos para las compuertas de tres entradas se muestran en la figura
1.9.
Cuando se indica por escrito operaciones NOR y NAND en cascada, deben utilizarse
los parntesis correctos para indicar la secuencia apropiada de las compuertas.
Ejemplo, considerando el circuito de la figura anterior (c).
La funcin booleana para este circuito debe escribirse como:
F = [ (A B C) (DE) ]= ABC + DE
Donde se tiene tambin que una expresin en suma de productos puede implantarse
con compuertas NAND. As, las compuertas excluyente OR y de equivalencia son
conmutativas y asociativas y pueden extenderse a ms de dos entradas.
Adems, la definicin de esas funciones debe modificarse cuando se extienden a ms
de dos variables. La excluyente-OR es una funcin impar, esto es, es igual a 1 si las
variables de entrada tienen un nmero impar de 1. La funcin de equivalencia es una
funcin par, es decir, es igual a 1 si las variables de entrada tienen un nmero par de 0.
La construccin de una funcin excluyente-OR de tres entradas se muestra en la figura
1.10.
As, en forma normal se implementa con compuertas de dos entradas en cascada,
como se muestra en (a). De manera grfica, puede representarse con una sola
compuerta de tres entradas como se muestra en (b). La tabla de verdad en ( c ) indica
con claridad que la salida F es igual a 1 si slo una entrada es igual a 1 o si todas las
tres entradas son iguales a 1, esto es, cuando el numero total de 1 en las variables de
entrada es impar.
Facultad de ingeniera Mecnica Elctrica
19
Monografa
Teora bsica de los PLC.
x
y
( x y) z = (x + y) z
X (y z) = x(y + z)
y
z
Figura 1.8.- Demostracin de la no asociabilidad del operador NOR: (x y) z x( y z)
X
y
z
X
y
z
(x + y + z )
(x y z)
(b) Compuertas NAND de tres
entradas
( a ) Compuerta NOR de tres
entradas
A
B
C
F = [ ( ABC) (DE)] = ABC + DE
D
E
( c ) compuertas NAND en cascada
Figura 1.9.- Compuertas de entradas mltiples NOR y NAND puestas en cascada.
x
y
F=xyz
( a) Uso de compuertas con dos entradas
x
y
z
F=x y z
(b) Uso de compuertas con 3 entradas
Figura 1.10.- Compuerta excluyente OR de tres entradas.
Facultad de ingeniera Mecnica Elctrica
20
Monografa
Teora bsica de los PLC.
SUB-TEMA 2.-INTRODUCCION A LOS PLCs.
2.1.- Descripcin de los PLCs.
Los controladores lgicos programables (PLC, por sus siglas en ingls), son dispositivos
electrnicos digitales que fueron investigados en 1969 para reemplazar a los circuitos
de
relevadores
(rels)
electromecnicos,
interruptores
otros
componentes
comnmente utilizados para el control de los sistemas de lgica combinacional. Es
importante destacar que en los sistemas de lgica combinacional, el estado de una
salida queda determinado por el estado de una cierta combinacin de entradas sin
importar la historia de stas.
As, de este modo un Controlador Lgico Programable (PLC) o Autmata Programable
Industrial (API) es una mquina electrnica diseada para trabajar en entornos
industriales controlando procesos secuenciales en tiempo real.
La descripcin general bsica de cualquier PLC autmata lo constituyen :
La Fuente de alimentacin
El CPU
El Mdulo de entrada
El Mdulo de salida
La Terminal de programacin
La Programacin.
Respecto a su disposicin externa, los autmatas pueden contener varias de estas
secciones en un mismo mdulo o cada una de ellas separadas por diferentes mdulos,
y de este modo se pueden distinguir autmatas Compactos y Modulares.
2.1.1.- La Fuente de alimentacin.
Es la encargada de convertir la tensin de la red, 220 volts C.A., a baja tensin de
C.C, normalmente 24 volts, siendo esta la tensin de trabajo en los circuitos
electrnicos que forma el autmata.
Facultad de ingeniera Mecnica Elctrica
21
Monografa
Teora bsica de los PLC.
2.1.2.-Unidad Central de Proceso (CPU).
La Unidad Central de Proceso se le conoce como el cerebro del sistema ya que se
encarga de recibir las ordenes del operario por medio de la consola de programacin y
el modulo de entradas. Posteriormente las procesa para enviar respuestas al mdulo de
salidas. En su memoria se encuentra residente el programa destinado a controlar el
proceso.
2.1.3.-Modulo de entradas.
A este mdulo se unen elctricamente los captadores (interruptores, finales de carrera,
pulsadores, etc.;).
La informacin recibida en l, es enviada a la CPU para ser procesada de acuerdo la
programacin residente.
Captadores
*Interruptores
*Finales de carrera
*Pulsadores
Informacin
recibida
Informacin que se
procesa por la
programacin residente.
Informacin
transferida
modulo de
entrada
C.P.U.
Informacin
procesada
Esquema 2.1.-Transferencia de informacin-entrada
2.1.4 .-Modulo de salidas.
El modulo de salidas del autmata es el encargado de activar y desactivar los
actuadores (bobinas de contactores, lmparas, motores pequeos, etc).
Informacin
Procesada por
el C.P.U.
modulo
de
salida
Informacin ON
Transferida
Bo
bi
na
s
captadores
OF
M
ot
or
es
Esquema 2.2.-Transferencia de informacin-salida
Facultad de ingeniera Mecnica Elctrica
22
Re
ls
L
m
Monografa
Teora bsica de los PLC.
2.1.5.-Terminal de programacin.
El terminal o consola de programacin es el que permite comunicar al operario con el
sistema., aqu se pueden tener teclados, consolas de control u otras terminales que
permiten realizar la comunicacin entre el usuario y el sistema.
2.1.6.-La Programacin.
Uno de los aspectos importantes en la descripcin de los PLCs es su programacin.
El primer lenguaje de programacin para PLC's, considerado de bajo nivel fu el
"Lenguaje de Escalera", el cual an se utiliza todava, as tambin el "lenguaje
Booleano" que se basa en los mismos principios del lgebra booleana, ste ltimo
utiliza nemnicos como (AND, OR, NOT, NAND, etc.) que representan equivalencia con
el lenguaje de escalera.
Cuando se comprendi el gran potencial de los PLC's , como poderosas computadoras
que son y se dio la evolucin de capacidades que ahora tienen, que no posean los
antiguos circuitos, aparecieron los lenguajes de alto nivel como el "lenguaje de
escalera" pero, con la adicin de funciones especiales complejas.
Posteriormente se desarrollaron los lenguajes especiales de computadora, tambin de
alto nivel, que son muy similares a los lenguajes de programacin de computadoras
como el Fortran, Pascal y otros que actualmente permiten la programacin.
La programacin con un LLRE requiere el uso de soluciones de casos especiales
eliminando
la
posibilidad
de
una
programacin
limpia,
directa
elegante,
adicionalmente, muy a menudo los programas resultantes son difciles de modificar por
no tener una estructura modular.
Cada proceso en un sistema real, atraviesa una secuencia de estados y cada mquina
o proceso es una coleccin de dispositivos o componentes fsicos, adems la operacin
de cualquiera de estos dispositivos, puede describirse como una secuencia de pasos
con respecto al tiempo. Inclusive los procesos continuos pasan por estados, por
ejemplo, fases de arranque, eventos manuales (o automticos), operaciones normales y
estados de parada.
Facultad de ingeniera Mecnica Elctrica
23
Monografa
Teora bsica de los PLC.
2.2.-Partes de un Controlador Lgico programable.
Un PLC de modo bsico est compuesto por tres partes, la seccin entrada salida E/S,
el procesador y el dispositivo de programacin terminal.
Esto se muestra en el esquema siguiente:
Seccin
entrada salida
Dispositivo de
programacin
terminal
Procesador
Esquema 2.3.- Representacin grfica de las partes de un PLC bsico.
2.2.1 Seccin entrada salida (E/S).
Esta seccin del PLC se encarga del trabajo de intercomunicacin entre los dispositivos
industriales y los circuitos electrnicos de baja potencia que se almacenan y asimismo
ejecutan el programa de control que es operado por el usuario.
La seccin E/S contiene mdulos de entrada y salida, aqu las condiciones de entrada
se almacenan en una parte de la memoria del procesador denominada archivo de
imgenes de entrada, esto es, que cada terminal del mdulo de entrada tiene su lugar
dentro del archivo de imgenes de entrada y este lugar solo sirve para guardar el ltimo
registro de estado de una terminal de entrada (1 lgico o HI, 0 Lgico o LO)
Las condiciones de salida se almacenan de manera similar en el archivo de imgenes
de salida, y aunque la funcin es idntica al archivo de imgenes de entrada, existe
una diferencia en el flujo de la informacin, mientras que en la salida, el flujo es del
archivo de imgenes de salida al mdulo de salida; en la entrada el flujo es del mdulo
de entrada al archivo de imgenes de entrada.
Esto se muestra en los esquemas siguientes:
Imgenes
de entrada
Modulo de
entrada
Flujo de
Informacin
Archivo de
imgenes de
entrada
Esquema 2.4.- Representacin del flujo de informacin en la entrada.
Facultad de ingeniera Mecnica Elctrica
24
Monografa
Teora bsica de los PLC.
Archivo de
imgenes
de salida
Flujo de
Informacin
Modulo de salida
Esquema 2.5.- Representacin del flujo de informacin en la salida.
As entonces, cada terminal de entrada o salida, tiene su lugar en el archivo de
imgenes
correspondiente
que
se
ubican
en
localidades
identificados
respectivamente por direcciones, el sistema de direcciones para cada terminal de salida
y entrada vara segn el fabricante del PLC.
2.2.2.- El procesador.
Es el que se encarga de la ejecucin del programa y se denomina unidad de
procesamiento central o simplemente CPU.
Cuando el CPU ejecuta un programa de control, el archivo de imgenes de salida se
actualiza continuamente y de inmediato, esto se hace necesario ya que las condiciones
de salida afectan instrucciones posteriores del programa.
As, el archivo de imgenes de salida tiene doble funcin, la primera es la recepcin
inmediata de informacin del CPU, para despus pasarla a los mdulos E/S; por otra
parte tambin tiene que ser capaz de pasar informacin de salida de regreso al CPU.
El archivo de imgenes de entrada no es de naturaleza doble pues su nica misin es
adquirir informacin de los terminales de entrada y pasar esta informacin al CPU.
Otra parte importante del procesador es el que se usa para el almacenamiento de
instrucciones del programa de control, denominado memoria del programa de usuario,
ya que el programa de control puede modificarse y operarse por el usuario.
Esta funcin de crear y/o modificar el programa de control, es el procedimiento para
programar el PLC donde, a medida que el usuario ingresa instrucciones,
automticamente stas se guardan en localidades secuenciales en la memoria del
programa de usuario, que es autocontrolado por el PLC; la cantidad de instrucciones
vara segn cuan complicado sea el proceso a controlar.
Facultad de ingeniera Mecnica Elctrica
25
Monografa
Teora bsica de los PLC.
Cuando el proceso de programacin se completa,
se pasa entonces al modo de
ejecucin, lo que permite entonces que el CPU ejecute el programa de principio a fin
repetidamente como se muestra en el diagrama siguiente:
Instrucciones
del usuario
MEMORIA DEL PROGRAMA
DEL USUARIO
USUARIO
P
L
C
MODO DE
EJECUCIN
Esquema 2.6.- Representacin del proceso en memoria de usuario
Ahora, cuando se dice que el CPU ejecuta un programa, lo hace en una serie repetitiva
de eventos de forma cclica y por esta razn se le conoce como ciclo de barrido
completo; comenzando con la primera operacin que es el barrido de entrada, donde,
durante este estado, el estado actual de cada terminal de entrada se almacena en el
archivo de imgenes de entrada actualizndolo, el tiempo en el que el PLC realiza est
operacin depende de:
La cantidad de mdulos,
Las terminales en la seccin E/S,
La velocidad del CPU y otras caractersticas tcnicas.
Ejemplo: Un sistema de 16 terminales tendr un tiempo de barrido de unos cuantos
cientos de microsegundos de tal modo que despus del barrido de entrada, el
procesador ejecuta el programa de control, que consiste empezando desde la primera
instruccin, llevando a cabo su secuencia de ejecucin para despus pasar a la
siguiente instruccin, y as hasta la ltima (a este proceso se le llama barrido de
programa) y cuyo tiempo de lectura est en el orden de los milisegundos.
Cuando se ejecuta el programa de control, el procesador mantiene actualizado el
archivo de imgenes de salida, pero no las terminales de salida, entonces el proceso en
que el archivo de imgenes de salida se transfiere a las terminales de salida se
denomina as barrido de salida.
Facultad de ingeniera Mecnica Elctrica
26
Monografa
Teora bsica de los PLC.
Esto se debe a que en algunas ocasiones durante la ejecucin de un programa de
control se hace necesario actualizar de inmediato una terminal de salida.
Afortunadamente algunos PLC tienen el mecanismo para hacer esto, su conjunto de
instrucciones tiene una opcin, que obedece a la instruccin de salida inmediata, la cual
a su vez temporalmente suspende la operacin normal del programa de actualizar la
terminal de salida y as regresar al programa.
2.2.3.- Dispositivo de programacin.
Una parte esencial de un PLC es el dispositivo de programacin, o terminal de
programacin, en este aspecto, algunos PLC estn equipados con su propio dispositivo
de programacin construido por el fabricante del PLC, pero sin embargo en muchas
instalaciones el dispositivo de programacin es una computadora porttil o de escritorio
que viene equipada con una tarjeta de interfaz de comunicacin con el procesador del
PLC unidos mediante un cable serial.
La computadora adems tiene que tener instalado un software de operacin en su
disco duro, que es proporcionado por el mismo fabricante del PLC.
Los dispositivos de programacin terminal son aquellos equipos que permiten que uno
o ms materias primas como recursos puedan transformarse o procesarse. Ejemplo:
motores, bombas, sistemas neumticos, sistemas elctricos, etc.
2.2.4.- Principios de operacin.
En el proceso de operacin, cada Controlador Lgico Programable se compone de dos
partes bsicas:
La Seccin operativa (SO) .
La Seccin de comando (SC) .
2.2.4.1.- La Seccin Operativa (SO).
Es la que opera la materia prima y el producto en general, se compone de:
Los medios y herramientas necesarias para transformar la materia prima, por
ejemplo: bombas, utensilios, taladros, etc.
Facultad de ingeniera Mecnica Elctrica
27
Monografa
Teora bsica de los PLC.
Los accionadores destinados a mover y poner en funcionamiento estos medios,
ejemplo:
Los motores elctricos para accionar una bomba.
Los gatos hidrulicos para cerrar una vlvula.
Los gatos neumticos para taladrar un cabezal de perforacin.
2.2.4.2.- Seccin de Comando (SC).
Es la que emite las ordenes hacia la seccin operativa (SO) y recoge las seales de
retorno para sus acciones. Esta seccin la seccin de comando (SC) se basa en
tcnicas de lgica programada. Como parte central de la seccin de comando (SC) est
el tratamiento, que se compone por la unin de tres dilogos:
El dialogo con la mquina: Consiste en el comando de los accionadores, (motores,
gatos) a travs de los pre-accionadores (contadores, distribuidores, variadores) y de la
adquisicin de las seales de la retroalimentacin provenientes de los sensores que
dependen de la evolucin del proceso.
El dialogo hombre-mquina: Permite manejar, regular, calibrar la mquina, aqu el
personal introduce mensajes y comandos y recoge informaciones del autmata.
El dialogo con otras mquinas: Este permite que varias mquinas puedan operar en
una misma produccin y su coordinacin est asegurada por el dilogo entre las
secciones de comando.
2.5 .-Tcnicas de Automatizacin
Bsicamente existen dos tecnologas que se emplean en la fabricacin de automatismo;
estas son: la lgica cableada y la lgica programada.
2.5.1.- La Lgica Cableada:
Se denomina conexin cableada lgica a todos los controladores cuya funcin se
determina mediante la conexin (cableado) de sus elementos individuales de conexin.
Facultad de ingeniera Mecnica Elctrica
28
Monografa
Teora bsica de los PLC.
As, por ejemplo, se determina la funcin de control mediante la seleccin de los
elementos de conexin (abrir o cerrar) y por las caractersticas de su conexin,
(conexin en serie o conexin en paralelo).
La estructura mecnica as como el cableado en el armario de distribucin depende de
la funcin del controlador. El montaje y cableado de un controlador programable puede
efectuarse recin despus de que se conozca su programa es decir, sus
documentaciones de conexin.
Cada cambio posterior de las funciones del controlador requieren un cambio de la
estructura y del cableado, es importante destacar que estos cambios son muchas veces
costosos y exigen mucho tiempo.
2.5.2.-Lgica Programada:
Aqu, la estructura y el cableado son ampliamente independientes de la funcin
deseada del controlador. Al equipo de automatizacin se conectan todos los contactos
emisores requeridos para la funcin del controlador (interruptores, pulsadores, barras
de luz, etc.) y todos los aparatos activadores sujetos al controlador (contactores,
vlvulas, etc.). En este caso el autmata se basa en la programacin de sus
constituyentes de tal forma que el funcionamiento obtenido resulta de la programacin
efectuada. En este modo la labor efectuada puede cambiar alternando el programa y
con ello la flexibilidad es mayor.
2.6 .- Ventajas de los PLCs.
Los PLC's resultaron muy atractivos ya que, a diferencia de los antiguos circuitos se uso
permite obtener las siguientes ventajas con respecto a otros:
Reprogramacin
Ocupan comparativamente muy poco espacio
Consumen poca potencia
Poseen auto-diagnstico y
Tienen un costo competitivo.
Facultad de ingeniera Mecnica Elctrica
29
Monografa
Teora bsica de los PLC.
As tambin, las innovaciones tecnolgicas en microprocesadores y memorias los ha
hecho ms verstiles y populares. Esta tecnologa a permitido que los PLCs presenten
ventajas sobre otras tecnologas electro-mecnicas como son:
Pueden realizar operaciones aritmticas
Manipulaciones complejas de datos
Mayor capacidad de almacenamiento
Comunicacin ms eficiente con el programador
Comunicacin ms eficiente con otros controladores
Comunicacin con otras computadoras en redes de rea local.
Entre otras caractersticas se tiene que muchos PLC's incorporan instrucciones y
mdulos para manejar seales anlogas como para realizar estrategias de control ms
sofisticados que el simple ON-OFF, tales como el control PID, inclusive con mltiples
procesadores.
Tambin por su presencia en el campo de trabajo y aplicacin, destacan las ventajas
siguientes:
Fiabilidad: Aqu, la distribucin de las tareas de control entre los diversos elementos o
subsistemas disminuye el riesgo de cada global del sistema completo.
Facilidad de ampliacin: Por su propia concepcin dividida en subsistemas permite
una fcil ampliacin de la aplicacin, al ser fundamentalmente modular.
Esto es, la incorporacin de una nueva unidad puede hacerse sobre el mismo sistema,
aadiendo al mismo bastidor las tarjetas adicionales necesarias, as se permite su fcil
adecuacin a las crecientes o variables necesidades del proceso.
Integracin: Esta se concibe en una doble vertiente:
La integracin vertical: Esta permite la incorporacin en una sola estructura de los
diversos niveles jerrquicos de control, nivel bsico o regulatorio, nivel de proceso, nivel
de planta y nivel de negocio corporativo.
La Integracin horizontal: Esta permite la incorporacin en una sola estructura de
control de los aspectos de control regulatorio, elctricos, de mantenimiento y de
proceso (clculos, balances, optimizacin).
Facultad de ingeniera Mecnica Elctrica
30
Monografa
Teora bsica de los PLC.
En resumen sobre las ventajas de los PLCs actuales, es que estos
incorporan
facilidades de comunicacin que permiten intercambiar datos con otros PLC's o con
ordenadores, proporcionando as una manera sencilla de desarrollar interfaces
hombre-mquina.
2.7.- Areas de aplicacin de los PLCs.
Un autmata programable suele emplearse en procesos industriales que tengan una o
varias de las siguientes necesidades:
Espacio reducido.
Procesos de produccin peridicamente cambiantes.
Procesos secuenciales.
Maquinaria de procesos variables.
Instalaciones de procesos complejos y amplios.
Chequeo de programacin centralizada de las partes del proceso.
Aplicaciones generales:
Maniobra de mquinas.
Maniobra de instalaciones.
Sealizacin y control.
Es importante destacar que la informacin aqu indicada es con referencia a los
autmatas programables industriales, dejando de lado los pequeos autmatas para
uso ms personal (que se pueden emplear, incluso, para automatizar procesos en el
hogar, como la puerta de una cochera o las luces de la casa).
2.8.-Componentes del CPU.
La unidad central de proceso (CPU) se encarga de procesar el programa de usuario
que se le introduce, para ello se dispone de diversas zonas de memoria, registros e
instrucciones de programa. Adicionalmente, en determinados modelos ms avanzados,
se puede disponer de funciones ya integradas en la CPU; como reguladores PID,
control de posicin, etc.El esquema siguiente muestra un modelo de CPU bsico:
Facultad de ingeniera Mecnica Elctrica
31
Monografa
Teora bsica de los PLC.
TOMA DE
TIERRA
ALIMENTACIN
SALIDAS
PILA
COMUNICACIN
CON TERMINAL
EXTENSIN
CARTUCHO
EEPROM
SALIDA 24
v.c.c
PANEL DE LEDS
ENTRADAS
Figura 2.7.-CPU Bsico
Tanto las entradas como las salidas estn aisladas de la CPU segn el tipo de
autmata que se utilice. Normalmente se suelen emplear opto-acopladores en las
entradas y rels / opto-acopladores en las salidas.
Dentro de la CPU se dispone de un rea de memoria, la cual se emplea para diversas
funciones, estas memorias son:
Memoria del programa de usuario: aqu se introduce el programa que el autmata va
a ejecutar cclicamente.
Memoria de la tabla de datos: se suele subdividir en zonas segn el tipo de datos
(como marcas de memoria, temporizadores, contadores, etc.).
Memoria del sistema: aqu se encuentra el programa en cdigo mquina que
monitoriza el sistema (programa del sistema o firmware). Este programa se ejecuta
directamente por el microprocesador / microcontrolador que posea el autmata.
Memoria de almacenamiento: se trata de una memoria externa que se emplea para
almacenar el programa de usuario y en ciertos casos parte de la memoria de la tabla
de datos, suele ser uno de los siguientes tipos: EPROM, EEPROM, o FLASH.
Por ultimo se tiene que cada autmata divide su memoria de esta forma genrica,
haciendo subdivisiones especficas segn el modelo y fabricante.
Facultad de ingeniera Mecnica Elctrica
32
Monografa
Teora bsica de los PLC.
2.8.1.- El Procesador.
El CPU se determina as que es el corazn del autmata programable ya que este es el
encargado de ejecutar el programa de usuario mediante el programa del sistema (es
decir, el programa de usuario es interpretado por el programa del sistema), aqu, sus
funciones son:
Vigilar que el tiempo de ejecucin del programa de usuario no exceda un
determinado tiempo mximo (tiempo de ciclo mximo). A esta funcin se le
denomina Watchdog (perro guardin).
Ejecutar el programa de usuario.
Crear una imagen de las entradas, ya que el programa de usuario no debe acceder
directamente a dichas entradas.
Renovar el estado de las salidas en funcin de la imagen de las mismas obtenida al
final del ciclo de ejecucin del programa de usuario.
Chequeo del sistema.
Para ello el autmata va a poseer un ciclo de trabajo, que ejecutar de forma continua,
el esquema siguiente muestra este aspecto:
ENTRADAS
IMAGEN DE
LAS
ENTRADAS
SALIDAS
EJECUCIN
DEL
PROGRAMA
DE USUARIO
IMAGEN DE
LAS
SALIDAS
WATCHDOG
Esquema 2.8.- Ciclo de trabajo del Autmata.
2.8.2.- La Memoria.
La memoria es un componente fundamental de las computadoras digitales y est
presente en gran parte de los sistemas digitales. Los chips LSI como hardware de
memoria pueden programarse para realizar funciones especficas, as un dispositivo
lgico programable (PLD) es un chip LSI que contiene una estructura de circuito
regular, pero que permite al diseador adecuarlo para una aplicacin especfica.
Facultad de ingeniera Mecnica Elctrica
33
Monografa
Teora bsica de los PLC.
Cuando un PLD tpico deja la fbrica de IC, an no est listo para una funcin
especfica, sino que debe ser programado por el usuario para que realice la funcin
requerida en una aplicacin particular.
Los chips con la mayor funcionalidad por unidad de rea han sido los chips de memoria,
que contienen arreglos rectangulares de celdas de memoria y uno de los PLD es el chip
de memoria de slo lectura. Es importante destacar que las computadoras y otros
tipos de sistemas requieren el almacenamiento permanente o semi-permanente de un
gran nmero de datos binarios de tal forma que los sistemas basados en
microprocesadores necesitan de la memoria para almacenar los programas y datos
generados durante el procesamiento y as disponer de ellos cuando sea necesario.
2.8.3 .-Tipos de Memoria.
La tecnologa fundamental que se utiliza para la memoria principal se basa en los
circuitos integrados semiconductores donde gran parte de la memoria principal en una
computadora de propsito general est formada de circuitos integrados de RAM, pero
una parte de la memoria est formada por la ROM.
Se utilizan dos tipos de memoria en las diferentes partes del computador :
Memorias de acceso aleatorio (RAM) y
Memorias de slo lectura (ROM).
La RAM acepta informacin nueva y la almacena para usarla despus, aqu el proceso
de almacenamiento de informacin nueva en la memoria se conoce como operacin de
escritura de memoria.
El proceso de transmisin de la informacin almacenada en la memoria se conoce
como operacin de lectura de este modo, la RAM puede llevar a cabo tanto
operaciones de escritura como de lectura.
La ROM es un dispositivo lgico programable (PLD, programmable logic device) donde
la informacin binaria que se almacena en este dispositivo debe especificarse de
alguna manera y luego insertarse en el hardware de la computadora.
Facultad de ingeniera Mecnica Elctrica
34
Monografa
Teora bsica de los PLC.
Este proceso se conoce como programacin de un dispositivo (la palabra
programacin se refiere al procedimiento de hardware que especifica los bits
insertados en la configuracin de hardware del dispositivo), a diferencia de la RAM la
ROM slo puede llevar a cabo la operacin de lectura de memoria.
Esto significa que la informacin pertinente se almacena dentro de la memoria y puede
recuperarse o leerse en cualquier momento; sin embargo, no puede alterarse de
ninguna manera, est memoria es slo un ejemplo de PLD.
2.8.4.- Caractersticas ms significativas de las memorias.
En los sistemas utilizados para el almacenamiento de informacin digital se ha querido
obtener dispositivos con una velocidad alta de acceso a los distintos registros que los
componen, con una gran capacidad de almacenamiento de datos, con bajo consumo y
bajo precio.
Las caractersticas ms importantes de las memorias son las siguientes:
Tiempo de escritura / lectura.
Cadencia de transferencia.
Densidad de informacin.
Volatilidad.
Capacidad.
El tiempo de escritura es el que el dispositivo emplea para registrar la informacin
desde el momento en que se presenta en su entrada. El de lectura es el que transcurre
desde la aplicacin de la orden de lectura hasta que la informacin aparece en la
salida. La cadencia est relacionada con los tiempos anteriores, ya que se define como
la velocidad a la cual la memoria emite o recibe informacin de lectura o escritura.
La densidad de informacin est relacionada con la escala de integracin y la cual se
define como el nmero de datos que puede almacenar por unidad de espacio fsico.
La volatilidad de una memoria consiste en la prdida de los datos almacenados ya sea
por las caractersticas de los elementos que la constituyen o por la falta de alimentacin
elctrica. En lo que respecta a la capacidad, es importante distinguir entre capacidad
Facultad de ingeniera Mecnica Elctrica
35
Monografa
Teora bsica de los PLC.
total de una memoria y el nmero total de posiciones disponibles. Se llama capacidad
total al nmero de bits que una memoria puede almacenar y por consiguiente, siempre
ser mayor la capacidad total que el nmero de posiciones, salvo en el caso de que el
nmero de bits por posicin sea uno. Esto se muestra en el esquema siguiente:
Capacidad Total de
Memoria.
Posiciones de Memoria.
4 Mega bits de
Memoria.
0011001
Esquema 2.9.-Capacidad y posiciones de memoria.
La operacin de seleccin de una determinada posicin de memoria se denomina
direccionamiento.
2.8.5.- Principios generales de la jerarqua de memoria.
Una jerarqua de memoria normalmente consta de muchos niveles, pero en cada
momento se gestiona entre dos niveles adyacentes.
El nivel superior (el ms cercano al procesador) es ms pequeo y ms rpido que el
nivel inferior. La mnima unidad de informacin que puede estar presente o no presente
en la jerarqua de dos niveles se denomina bloque.
El tamao de un bloque puede ser fijo o variable y si es fijo, el tamao de memoria es
un mltiplo de ese tamao de bloque.
El xito o fracaso de un acceso a un nivel superior se designa como acierto o fallo: un
acierto (hit) es un acceso a memoria que se encuentra en nivel superior, mientras que
un fallo (miss) significa que no se encuentra en ese nivel.
Facultad de ingeniera Mecnica Elctrica
36
Monografa
Teora bsica de los PLC.
La frecuencia de aciertos es la fraccin de accesos a memoria encontrados en el nivel
superior, y la frecuencia de fallos es la fraccin de accesos a memoria no encontrados
en el nivel superior.
Como el rendimiento es la principal razn para tener una jerarqua de memoria, la
velocidad de aciertos y fallos es importante, aqu el tiempo de acierto es el tiempo para
acceder al nivel superior de la jerarqua de memoria, que incluye el tiempo para
determinar si el acceso es un acierto o un fallo.
Penalizacin de fallo es otro concepto importante ya que es el tiempo para sustituir un
bloque a nivel superior por el bloque correspondiente al nivel ms bajo, ms el tiempo
que se tarda en proporcionar este bloque al dispositivo que lo ha pedido. La
penalizacin de fallos se divide adems en dos componentes: tiempo acceso (el tiempo
para acceder a la primera palabra de un bloque en un fallo) y el tiempo de transferencia
(el tiempo adicional para transferir las restantes palabras del bloque).
El tiempo de acceso est relacionado con la latencia del nivel ms bajo de memoria,
mientras que el tiempo de transferencia est relacionado con el ancho de banda entre
las memorias del nivel superior y nivel inferior.
La direccin de memoria est dividida en piezas que acceden a cada parte de la
jerarqua.
La eleccin de la estructura del bloque es la parte de orden superior de la direccin,
que identifica un bloque en ese nivel de la jerarqua.
La direccin del desplazamiento del bloque es la parte de orden inferior de la direccin
e identifica un elemento en un bloque. El tamao de la direccin del desplazamiento del
bloque es log2(tamao del bloque); el tamao de la direccin de la estructura del bloque
es entonces el tamao de la direccin completa en este nivel menos el tamao de la
direccin de desplazamiento de bloque, ecuaciones que se muestran a continuacin:
T ddb = log 10 ( tb )
T deb = T dc T ddb
Facultad de ingeniera Mecnica Elctrica
37
Monografa
Teora bsica de los PLC.
Donde:
Tddb = tamao de la direccin del desplazamiento del bloque.
Tb = tamao del bloque
Tdeb = tamao de la direccin de la estructura del bloque
Tdc = tamao de la direccin completa.
2.8.6.- Memoria cach.
El anlisis de una gran cantidad de programas tpicos ha mostrado que las referencias
a memoria en cierto intervalo de tiempo, tienen a confinarse dentro de unas cuantas
reas localizadas en la memoria, a este fenmeno se le conoce como la propiedad de
localidad de referencia.
Cuando se ejecuta un ciclo del programa, la CPU hace referencia repetidamente al
conjunto de instrucciones en memoria que constituyen el ciclo, de tal modo que las
subrutinas tienden a localizar la referencia en memoria para recuperar instrucciones.
Es importante destacar que si las partes activas del programa y datos se colocan en
una memoria pequea y rpida se puede reducir el tiempo de acceso a memoria y, por
lo tanto, se reduce el tiempo de ejecucin del programa a esta memoria se le denomina
memoria cach.
La cach es el componente ms rpido de la jerarqua de memoria y se aproxima a la
velocidad de los componentes de la CPU, su actividad de organizacin es el de
conservar las instrucciones y datos que se accesan con mayor frecuencia y aunque es
slo una pequea parte del tamao de la memoria principal, una gran parte de las
solicitudes de memoria se encontrarn aqu por la propiedad que presentan en la
localidad de referencia de los programas.
Su operacin bsica es la siguiente: Cuando la CPU necesita acceder memoria, se
revisa la cach de tal forma que si se encuentra la palabra aqu, entonces se lee de
esta memoria de un modo ms rpido.
Ahora, si la palabra direccionada de la CPU no se encuentra en cach, se accesa la
memoria principal para leer la palabra, despus, se transfiere un bloque de palabras
que contiene la que se acaba de acceder, de la memoria principal a la memoria cach.
Facultad de ingeniera Mecnica Elctrica
38
Monografa
Teora bsica de los PLC.
La escritura en esta memoria se relaciona con las solicitudes de escritura en memoria,
cuando la CPU encuentra una palabra mediante una operacin de lectura, la memoria
principal no participa en la operacin de transferencia, sin embargo, si la operacin es
de escritura, hay dos maneras en las que puede proceder el sistema:
El procedimiento ms sencillo y de uso ms comn es actualizar la memoria
principal con cada operacin de escritura de memoria, la memoria cach se
actualiza en paralelo si contiene la palabra en la direccin especificada, esto se
denomina el mtodo de escritura simultnea, este mtodo tiene la ventaja de que la
memoria principal siempre contiene los mismos datos que el cach. Esta
caracterstica es importante en sistemas con transferencias de acceso directo a
memoria.
El segundo procedimiento se denomina mtodo de escritura al retorno. En este
mtodo slo se actualiza la operacin de cach mediante una operacin de
escritura. La localidad se marca despus mediante una bandera para que, ms
tarde, cuando la palabra se quite de cach se copie a la memoria principal. La razn
de este mtodo de escritura al retorno es que durante el tiempo que una palabra
reside en la cach, puede actualizarse varias veces.
2.8.7.- Memoria virtual.
La memoria virtual es un concepto que se usa en algunos sistemas de computadoras
grandes y que permite al usuario construir programas como si estuviera disponible un
gran espacio de memoria, igual a la totalidad de la memoria auxiliar.
Esta memoria utiliza una parte de almacenamiento secundario de la computadora
(disco duro) como si fuera memoria, en esta cada direccin a la que hace referencia la
CPU recorre un mapeo de direccin de la supuesta direccin virtual a una direccin
fsica en la memoria principal.
La memoria virtual se emplea para dar a los programadores la ilusin de que tienen a
su disposicin una memoria muy grande, aunque la computadora tenga en realidad una
memoria relativamente pequea, sin embargo el sistema de memoria virtual
proporciona un mecanismo para trasladar direcciones generadas por programas a
Facultad de ingeniera Mecnica Elctrica
39
Monografa
Teora bsica de los PLC.
localidades correctas en la memoria principal, esto se hace en forma dinmica, mientras
la CPU ejecuta programas.
2.8.8.- Memoria de Acceso Aleatorio Esttica (SRAM) .
La RAM esttica (SRAM) consiste en latches internos que almacenan la informacin
binaria, aqu la informacin almacenada es vlida mientras se aplique energa a la RAM
de tal forma que una vez que se escribe una palabra en una localidad, sta permanece
almacenada todo el tiempo que se siga aplicando energa al chip, a menos que se
escriba de nuevo en la misma localidad.
2.8.9.-Memoria de Acceso Aleatorio Dinmica (DRAM) .
La RAM dinmica (DRAM) almacena la informacin binaria en forma de carga elctrica
en capacitores, aqu, la carga que se almacena tiende a perderse con el tiempo, por lo
que deben recargarse peridicamente refrescando la DRAM.
Este requerimiento significa que el sistema de memoria ocasionalmente no est
disponible porque est enviando una seal para refrescar cada chip.
2.8.10.-Memoria de Solo Lectura Programable y Memoria de Solo Lectura Borrable
y Programable ( PROM y EPROM).
Las PROMs son bsicamente iguales que las ROM de mscara, una vez que han sido
programadas. La diferencia consiste en que las PROMs salen de fbrica sin estar
programadas y las programa el usuario a medida y de acuerdo a sus necesidades.
Normalmente una PROM se programa insertndola en un dispositivo especial
denominado programador de PROMs, que es controlado por software.
2.8.11.- Memorias de Solo Lectura Borrable y Programable (EPROM).
Una EPROM es una PROM borrable. A diferencia de una PROM ordinaria, una EPROM
puede ser reprogramada si antes se borra el programa existente en la matriz de
memoria.Los dos tipos fundamentales de EPROMs son las PROM borrables por rayos
ultravioletas (UV EPROM) y las PROMs borrables elctricamente (EEPROM).
Facultad de ingeniera Mecnica Elctrica
40
Monografa
Teora bsica de los PLC.
2.8.12 Memoria de Solo Lectura Borrable Electrnicamente (EEPROM).
Las PROMs borrables elctricamente se pueden borrar y programar mediante impulsos
elctricos, a estas se les conoce EEPROM.
La ventaja de las EEPROMs es que se pueden reprogramar dentro del propio circuito
final, sin tener que sacarlo del mismo, esto permite reconfigurar cualquier sistema fcil
y rpidamente.
2.8.13.- Memoria flash.
Las memorias flash son memorias de lectura/escitura de alta densidad (gran capacidad
de almacenamiento de bits) que son no voltiles.
En este tipo de memoria entra un concepto muy importante que es la Alta densidad que
significa que se puede empaquetar en una pequea superficie del chip, gran cantidad
de celdas, lo que implica que cuanto mayor sea la densidad, ms bits se pueden
almacenar en un chip de tamao determinado.
La memoria flash es la memoria ideal porque posee una capacidad de almacenamiento
alta, es no voltil, tiene capacidad de lectura / escritura, rapidez de operacin
comparativamente alta, y buena relacin calidad / precio.
Las tecnologas tradicionales de memoria como la ROM, RAM, EPROM, EEPROM,
SRAM, DRAM, poseen una o ms caractersticas pero ninguna de ellas tiene todas,
excepto las memorias flash.
Actualmente estas memorias se utilizan en la fabricacin de BIOS para computadoras,
generalmente conocidos como FLASH-BIOS. La ventaja de esta tecnologa es que
permite actualizar el bios con un software proporcionado por el fabricante, sin
necesidad de desmontar el chip del circuito final, ni usar aparatos especiales.
2.9.- Dispositivos de Programacin.
Un parte esencial de un PLC es el dispositivo de programacin, o terminal de
programacin. Algunos PLC estn equipados con su propio dispositivo de programacin
construido por el fabricante del PLC, pero en muchas instalaciones el dispositivo de
programacin es una computadora porttil o de escritorio que viene equipada con una
Facultad de ingeniera Mecnica Elctrica
41
Monografa
Teora bsica de los PLC.
tarjeta de interfaz de comunicacin con el procesador del PLC unidos mediante un
cable serial.
La computadora adems tiene un software especial instalado en el disco duro, que es
proporcionado por el fabricante del PLC.
As, los PLC tambin estn equipados con instrucciones que proporcionan capacidades
como :
Puede producir un retardo de tiempo en un sistema de control, porque est
equipado con temporizadores internos.
Pueden contar eventos, como cierres de interruptores, porque est equipado con
contadores internos, de tipo incrementales y decrementales.
Un PLC puede ejecutar operaciones aritmticas (+ , - , * , / ), con los datos
residentes en su memoria.
Puede ejecutar comparaciones numricas (mayor que, menor que, igual, diferente),
y lgicas(y, o)
Estas 4 operaciones quieren decir que un PLC puede trabajar con nmeros y
almacenarlos, estos nmeros cambian en un ciclo de barrido, es por eso que estos
datos numricos son almacenados en la memoria de datos variables para mantener la
cuenta pues intervienen en el programa de control.
Cuando el procesador a terminado de ejecutar un escaln pasa al siguiente y repite de
nuevo toda la secuencia, hasta terminar el programa.
Los PLC tambin trabajan con entradas analgicas, cuyo uso es necesario cuando las
entradas digitales son intiles para determinados procesos como por ejemplo cuando
se quiere que el PLC tome decisiones lgicas basndose en un valor medido de alguna
variable externa, que puede ser la temperatura.
Entonces para que el PLC trabaje con este tipo de entradas, el modulo E/S deber
estar equipado con un convertidor analgico digital A/D, para que reciba datos en
formato analgica, y proporcione como respuesta en las salidas un formato digital.
A veces se requiere que las salidas tambin trabajen en modo analgico, para esto el
modulo E/S de salida, deber tener instalado un convertidor A/D.
Facultad de ingeniera Mecnica Elctrica
42
Monografa
Teora bsica de los PLC.
SUB-TEMA 3.-DISPOSITIVOS DE ENTRADA / SALIDA.
3.1.-Introduccin.
Cuando se lleva a cabo la implementacin de un sistema de control utilizando PLCs
(Controladores Lgicos Programables), intervienen 4 elementos en la estructura.
Estos elementos son los siguientes:
El Chasis.
La fuente de alimentacin del PLC y la fuente de alimentacin de instrumentos.
Los mdulos de tarjetas electrnicas de entrada / salida.
El procesador o CPU.
De esto se tiene entonces.
3.2.-El Chasis.
A este elemento se le conoce tambin como bastidor y depende de :
El nmero de tarjetas electrnicas que se vayan a alojar.
La carga mxima en amperes.
Los tipos de mdulos de entradas y salidas que son aceptadas.
En la figura siguiente se sealan la ubicacin y sus respectivos nombres de las partes
principales que forman a un chasis.
CHASIS DE 12 RANURAS
Puente
B A CKP L A N E
Ranura
para el
CPU
O PISTA
DE DATOS
10
11
12
SW-1
Figura 3.1-Componentes del chasis.
Facultad de ingeniera Mecnica Elctrica
43
Monografa
Teora bsica de los PLC.
En esta figura se tiene que la ranura en donde se inserta el CPU no se toma en cuenta
para contabilizar el chasis, se considera como la ranura cero. La placa que se
encuentra hasta el fondo del chasis se conoce como BACKPLANE, pista o bus de datos
y sirve para distribuir la alimentacin a todas las tarjetas electrnicas, tambin funciona
como medio de comunicacin entre las tarjetas electrnicas de entrada y salida con el
procesador o CPU.
Cada ranura segn se muestra en la figura cuenta con 2 conectores uno superior y otro
inferior, el conector superior es utilizado por todos los mdulos, debido a que ah se
encuentran las conexiones de distribucin de energa del BLACKPLANE, el conector
inferior no todas las tarjetas lo utilizan, esto depende del tipo de tarjetas que se este
utilizando.
El interruptor SW-1 sirve para la configuracin del chasis.
3.3.- La Fuente de Alimentacin del PLC.
Un sistema de control (PLC) utiliza dos fuentes de alimentacin para que el sistema
opere :
La fuente de alimentacin del PLC o de control,
La fuente de energa de alimentacin de instrumentos o de fuerza.
La Fuente de Alimentacin del PLC, conocida tambin como fuente de control, se
emplea para alimentar al procesador y las tarjetas electrnicas de entradas y salidas,
existen dos formas de lograrlo:
1).-La primera es con una fuente interna que va colocada en las ranuras del mismo
chasis.
2).-La otra alternativa es utilizar fuentes externas al chasis, esta conexin se realiza
mediante una conexin por medio de un cable especial de la fuente a un conector
especial del chasis. Se requieren 5 Vcd para una carga mxima de 24 amperes,
independientemente del tipo de fuente que se utilice ( interna o externa).
Facultad de ingeniera Mecnica Elctrica
44
Monografa
Teora bsica de los PLC.
3.3.1. Fuente de alimentacin del PLC interna.
Como esta fuente utiliza las mismas ranuras del chasis que son utilizadas
principalmente por las tarjetas electrnicas (mdulos) de entradas o salidas, al colocar
la fuente en este lugar se perder disponibilidad del sistema para insertar o utilizar uno
o varios mdulos adicionales. La fotografa siguiente presenta un modelo de fuente de
alimentacin interna:
Luz de operacin
Conexin para enparalelar
Interruptor de encendido
Fusible
Puntos de
Alimentacin de la
fuente a 110 Vac
1 RANURA
Fotografa 3.2.- Fuente de alimentacin
3.3.2.- Fuente de Alimentacin del PLC Externa.
Esta fuente brinda un mayor espacio para el sistema de control, pues no utilizan las
ranuras del chasis para alimentarlo, la fotografa siguiente muestra una de las fuentes
externas, haciendo referencia a sus partes principales que las forman:
Luz de operacin
Conexin para enparalelar
Interruptor de encendido
Puntos de
Fusible
alimentacin de la
fuente a 24 Vac
2 RANURAS
2 RANURAS
Fotografa 3.3.- Fuente de alimentacin externa.
Facultad de ingeniera Mecnica Elctrica
45
Monografa
Teora bsica de los PLC.
3.3.3-Fuente de alimentacin a instrumentos.
Esta fuente de alimentacin se le conoce tambin como fuente de alimentacin de
fuerza. Esta fuente alimenta todos los instrumentos para que operen, por lo tanto las
caractersticas de la fuente dependen de las necesidades de la instrumentacin misma,
as que esto puede ser tan variable que si se utilizan instrumentos con diferentes
rangos de alimentacin se tienen que usar varias fuentes para cubrir todas las
necesidades.
3.4.-Mdulos de tarjetas electrnicas de entrada.
A este mdulo se unen elctricamente los captadores (interruptores, finales de carrera,
pulsadores,...).
La informacin recibida en l, es enviada a la CPU para ser procesada de acuerdo la
programacin residente.
Se pueden diferenciar dos tipos de captadores conectables al mdulo de entradas: los
Pasivos y los Activos.
Los Captadores Pasivos son aquellos que cambian su estado lgico, activado - no
activado, por medio de una accin mecnica. Estos son los Interruptores, pulsadores,
finales de carrera, etc., como se muestra en la figura siguiente :
Figura 3.4.-Captadores pasivos
Los Captadores Activos son dispositivos electrnicos que necesitan ser alimentados
por una tensin para que varen su estado lgico. Este es el caso de los diferentes
tipos de detectores (Inductivos, Capacitivos, Fotoelctricos). Muchos de estos aparatos
pueden ser alimentados por la propia fuente de alimentacin del autmata.
La figura siguiente muestra este tipo de captadores :
Facultad de ingeniera Mecnica Elctrica
46
Monografa
Teora bsica de los PLC.
Figura 3.5.-Captadores Activos
Sin embargo en circuitos automatizados, los captadores son generalmente abiertos, el
mismo arrancador paro/marcha realizado con un autmata es el de la figura siguiente,
en l se ve que ambos pulsadores y el rel trmico auxiliar son abiertos.
KM1
F1
F2
L
NC 0
C
2 4CJ 3
4 5
LYS
AUTOMATA
S1
KM1
S2
KM1 A1
S1.- PULSADOR DE PARADA
S2.-PULSADOR DE MARCHA
F1.-FUSIBLE
F2.-RELE TERMICO
KM1.-CONTACTOR DE LINEA
P. PARADA
S1
P. MARCHA
S2
24V 0 1 2
5 6
8 9 10 11
F2
A2
Figura 3.6.-Analoga entre un sistema Elctrico y un sistema autmata
3.5.-Mdulos de tarjetas electrnicas de salida.
Facultad de ingeniera Mecnica Elctrica
47
Monografa
Teora bsica de los PLC.
El modulo de salidas del autmata es el encargado de activar y desactivar los
actuadores (bobinas de contactores, lmparas, motores pequeos, etc).
La informacin enviada por las entradas a la CPU, una vez procesada, se enva al
mdulo de salidas para que estas sean activadas y a la vez los actuadores que en ellas
estn conectados.
Segn el tipo de proceso a controlar por el autmata, podemos utilizar diferentes
mdulos de salidas.
Existen tres tipo bien diferenciados:
A rels.
A triac.
A transistores.
3.5.1.-Mdulos de salidas a rels.
Son usados en circuitos de corriente continua y alterna. Estn basados en la
conmutacin mecnica, por la bobina del rel, de un contacto elctrico normalmente
abierto.La figura siguiente presente este tipo de mdulos:
Figura 3.7.-Mdulo de salidas con rels
3.5.2.-Mdulos de salidas a Triacs.
Se utilizan en circuitos de corriente continua y corriente alterna que necesiten
maniobras de conmutacin muy rpidas.
A continuacin se presenta un mdulo de salidas a Triacs:
Facultad de ingeniera Mecnica Elctrica
48
Monografa
Teora bsica de los PLC.
Figura 3.8.-Mdulo de salidas a triacs
3.5.3.-Mdulos de salidas a Transistores a colector abierto.
El uso del este tipo de mdulos es exclusivo de los circuitos de c.c. igualmente que en
los
de
Triacs,
es
utilizado
en
circuitos
que
necesiten
maniobras
de
conexin/desconexin muy rpidas, esto se muestra a continuacin :
Figura 3.9.-Mdulo de salidas a transistores a colector abierto.
La forma de conectar los actuadores a los mdulos de salidas, depender del tipo de
mdulo utilizado.
3.5.4.-Modulo de Salida Discretas.
Facultad de ingeniera Mecnica Elctrica
49
Monografa
Teora bsica de los PLC.
Este es un dispositivo capaz de convertir una seal (on-off) como seales de fuerza, se
tienen seales de rango de 5 a 250 volts de corriente directa, as como de 12 a 250
Volts de corriente alterna. La seal de control siempre es la misma y solo maneja dos
valores, el primero de ellos es el cero lgico, (0 que equivale a valores entre rango de 0
a 2 Vcd aprox.) este valor indica el estado de apagado, abierto, o estado off del
instrumento conectado al mdulo, el otro valor corresponde al uno lgico ( 1 que
equivale a valores entre el rango de 3.5 a 5 Vcd Aprox.) este valor nos indica el estado
de encendido, cerrado o estado on del instrumento conectado al mdulo.
La fuente de alimentacin del PLC es la que suministra la energa al mdulo de salidas
discretas para que los circuitos electrnicos que estn en su interior puedan operar. La
fuente de alimentacin a instrumentos es la que proporciona la seal de fuerza hacia el
mdulo de salidas discretas para que este pueda alimentar al instrumento conectado al
canal 1. A travs del circuito electrnico optoacoplado. El funcionamiento del circuito
electrnico optoacoplado se muestra en la figura siguiente:
CIRCUITO ELECTRNICO OPTOACOPLADO
Alimentacin al Mdulo
Canal uno
SOLENOIDE 1
A
CIRCUITO
RECEPTOR
DE LUZ
B
CIRCUITO
EMISOR DE
LUZ
+
5 vcd FUENTE DE
- ALIMENTACIN
DEL PLC
Rangos de :
12 a 250 Vac
5 a 250 Vcd
Puntos de conexin a
travs de los cuales se
reciben los datos del
FUENTE DE
ALIMENTACIN A
PROCESADOR hacia el
INSTRUMENTOS
mdulo de SALIDAS
DISCRETAS, utilizando
como medio el
Figura 3.10.-Representacin de un circuito electrnico optoComn
acoplado
En el caso de un mdulo de salidas discretas el flujo de informacin nace en la memoria
del programa de control situado en el procesador o CPU.
Facultad de ingeniera Mecnica Elctrica
50
Monografa
Teora bsica de los PLC.
Cuando el procesador enva una seal para activar una solenoide como se muestra en
la figura, primeramente enva una seal de control ( 1 lgico ) que sale del mismo
procesador y viaja a travs del blackplane ( pista de datos ) del chasis, luego esta seal
de control es transferida a los peines de conexin del mdulo de salidas discretas,
inmediatamente es activado el circuito emisor de Luz, generando un haz luminoso el
cual incidir en el circuito receptor de luz, en un interruptor electrnico que unir a los
puntos A y B, provocando as un puente para energizar la solenoide 1 indicada en la
figura, en este ejemplo expuesto se considera que la fuente de alimentacin
instrumentos es de 24 Volts de corriente directa.
Los mdulos de Salida discretas o digitales se clasifican de acuerdo a las fuentes de
instrumentos mismo que se vaya a utilizar, y se clasifican como sigue:
3.5.5.-Mdulos de Salidas Discretas de Corriente Directa.
Existen varios tipos de mdulos dentro de esta clasificacin, como son, el nmero de
catalogo del mdulo, el nmero de instrumentos o salidas que pueden ser conectados a
cada mdulo, as como el nivel de energa o voltaje de operacin del mdulo, la mxima
demanda de corriente que soporta el mdulo por cada salida y por el mdulo completo
para alimentar los instrumentos conectados, y por ltimo el consumo de corriente en el
backplane del chasis por el mdulo.
3.5.6.-Modulo de Salidas Discretas de Corriente Alterna.
Existen varios tipos de mdulos dentro de esta clasificacin, como son el nmero de
catalogo del mdulo, el nmero de instrumentos o salidas que pueden ser conectados a
cada mdulo, as
como el nivel de energa o voltaje de operacin del mdulo, la
mxima demanda de corriente que soporta el mdulo por cada salida y por el mdulo
completo para alimentar los instrumentos conectados, y por ltimo el consumo de
corriente en el backplane del chasis por el mdulo.
3.6- Modulo de Entrada / Salida.
En la tabla siguiente se muestran algunos mdulos de entradas analgicas de varios
Facultad de ingeniera Mecnica Elctrica
51
Monografa
Teora bsica de los PLC.
tipos.
Tipo
Ent.
Analgicas
Ent.
Analgicas
Ent.
Analgicas
Aisladas
Ent.
Analgicas
Termopar
Ent.
Analgicas
RTD
Numero de
puntos
Rango de
Rango de
voltaje (Volt) corriente (mA)
8
0 a 5, 1 a 5 4 a 20, 0 a 20
Diferenciales
-10 a +10
-20 a +20
16 sencillas
8
0 a 50
Diferenciales
8
0 a 5, 1 a 5 4 a 20, 0 a 20
Diferenciales
-10 a +10
-20 a +20
1000 V
aislam.
8 diferenciales Tipo E, J, K,
R, S, T
6
3 hilos por
canal
Ent.
Analgicas
SERIE N
8
1000 V
aislam.
Sal.
Analgicas
Sal.
Analgicas
Sal.
Analgicas
Sal.
Analgicas
SERIE N
4
Aisladas
4
Aisladas
4
Aisladas
8
100 Ohms.
4 a 20
1 a 5 0 a 10
-10 a 10
Corriente
(mA)
backplane
750
No.
Catalogo
Resolucin
1771-IFE
12 Bits
750
1771-IFM
12 Bits
1300
1771-IL
12 Bits
750
1771-IXE
/B
15 Bits
800
1771-IR /
B
16 Bits
2400
1771-NIS
0.34
uA / Bit
1500
4 a 20
0 a 50
0 a 25
1771OFE1
1500
1771OFE2
1500
1771OFE3
2800 @
177120mA 3200 NOC
@ 25mA
12 Bits
12 Bits
12 bits
3.2
uA / Bit
Tabla 3.11.-Mdulos de Entradas
analgicas
3.7.-Mdulos de Comunicacin.
La mayora de las aplicaciones hoy en da ya no pueden considerarse aplicaciones
aisladas en el proceso global, ms an, es necesario supervisar y monitorear
las
distintas variables que intervienen en el proceso.
Generalmente para la visualizacin o monitoreo de variables en un PLC se puede optar
por una Pantalla de Dialogo Hombre-Mquina o por la comunicacin hacia un
Facultad de ingeniera Mecnica Elctrica
52
Monografa
Teora bsica de los PLC.
computador personal con software dedicado de desarrollo local o software de
supervisin grfica comercial.
Cualquiera de las alternativa elegidas, cada una de ellas requiere de interfaces de
comunicaciones apropiadas para el establecimiento de la comunicacin.
Una de las alternativas para esto, es la incorporacin de mdulos de comunicaciones
individuales para comunicacin punto a punto, multipunto o para la integracin a una
Red de Computadores. Los ms comunes son:
3.7.1.-Mdulos de Comunicacin Asncrona:
Estos mdulos estn destinados a la comunicacin del PLC con dispositivos perifricos
que puedan soportar un enlace de comunicaciones de tipo serial. Podemos distinguir en
esta categora dos tipos de interfaces:
Modulo de Comunicacin Asncrona Punto a Punto RS-232: con la cual podemos
comunicarnos con cualquier dispositivo que soporte la norma RS-232, tales como:
Computadores personales, pantallas de dialogo, otros PLC, impresoras seriales, etc.
Este tipo de comunicacin se caracteriza por estar diseado para enlaces de tipo punto
a punto y a distancias relativamente pequeas, generalmente para un mximo de 18
mts., los parmetros que caracterizan este tipo de comunicaciones son:
Velocidad
Paridad
Bits de datos
Bits de Parada
Distancia
Control de Flujo
Cuando se requieren velocidades mayores, es posible aumentar la distancia mediante
dispositivos
especiales
denominados
LAN-DRIVERS.
Estos
permiten
alcanzar
distancias de varios Kilmetros a razones de transferencia mxima de 9600 bps.
Mdulos de comunicacin Multipunto: Estos se caracterizan por soportar la conexin
de varias estaciones trabajando en un esquema Maestro-Esclavo. Las velocidades de
Facultad de ingeniera Mecnica Elctrica
53
Monografa
Teora bsica de los PLC.
transferencia son muy elevadas, 1 Mbps, y las distancia abarcadas son cercanas a 1
kilmetro. Se distinguen dos tipos:
RS-422
RS-485
La RS-422 es una interfaz multipunto que puede soportar hasta 32 estaciones con una
velocidad de transferencia de 1 Mbps, hasta una distancia de aprox. 1 kilmetro en 2 o
4 hilos ( half-duplex, full-duplex ). La RS-485 es una mejora de la RS-422 en una
versin Half-duplex ( 2 hilos ) que tiene un mejor performance en sus caracterstica
elctricas.
Mdulos de Red Propietarias: Los mdulos de Red propietarias son mdulos de
comunicaciones destinados a la comunicacin de PLC de una marca en particular, no
estn regidos por ninguna norma internacional y son diseados por el fabricante para
sus propios dispositivos.
Modulo de Red Comerciales: Los mdulos de Red comerciales, son mdulos de
comunicaciones con normas internacionales que incorporan los fabricantes de PLC
para la integracin de sus propios sistemas como tambin para la integracin con
sistemas de redes comerciales y de otros fabricantes.
3.8.-Terminal de programacin.
El terminal o consola de programacin es el que permite comunicar al operario
con el sistema.
Las funciones bsicas de ste son las siguientes:
Transferencia y modificacin de programas.
Verificacin de la programacin.
Informacin del funcionamiento de los procesos.
Como
consolas
de
programacin
pueden
ser
utilizadas
las
construidas
especficamente para el autmata, tipo calculadora o bien un ordenador personal,
Facultad de ingeniera Mecnica Elctrica
54
Monografa
Teora bsica de los PLC.
PC, que soporte un software especialmente diseado para resolver los problemas
de programacin y control. Los modelos siguientes muestran algunos ejemplos de
terminales de programacin.:
Terminal de programacin porttil Terminal de programacin compatible PC
Fotografa y Dibujo 3.12.-Ejemplos de Terminales de programacin
3.9.-Perifricos.
Los perifricos no intervienen directamente en el funcionamiento del autmata, pero
sin embargo facilitan la labor del operario.
Los ms utilizados son:
Grabadoras a cassettes.
Impresoras.
Cartuchos de memoria EEPROM.
Visualizadores y paneles de operacin OP.
3.10.-Lenguaje de programacin.
Cuando surgieron los autmatas programables, lo hicieron con la necesidad de sustituir
a los enormes cuadros de maniobra construidos con contactores y rels. Por lo tanto, la
comunicacin hombre-maquina debera ser similar a la utilizada hasta ese momento. El
lenguaje usado, debera ser interpretado, con facilidad, por los mismos tcnicos
Facultad de ingeniera Mecnica Elctrica
55
Monografa
Teora bsica de los PLC.
electricistas que anteriormente estaban en contacto con la instalacin. Estos lenguajes
han evolucionado en los ltimos tiempos, de tal forma que algunos de ellos ya no tienen
nada que ver con el tpico plano elctrico a rels.
Los lenguajes ms significativos son:
3.10.1.-Lenguaje a contactos. (LD)
Es el que ms similitudes tiene con el utilizado por un electricista al elaborar cuadros de
automatismos. Muchos autmatas incluyen mdulos especiales de software para poder
programar grficamente de esta forma.
%X1
% Q 0.1
( )
%X2
% Q 0.2
( )
% Q 0.3
%X3
% M1
( )
% 10.2
% 10.7
Diagrama 3.13.-Modelo de lenguaje a contactos
3.10.2.-Lenguaje por Lista de Instrucciones. (IL)
En los autmatas de gama baja, es el nico modo de programacin. Consiste en
elaborar una lista de instrucciones o nemnicos que se asocian a los smbolos y su
combinacin en un circuito elctrico a contactos. Tambin decir, que este tipo de
lenguaje es, en algunos los casos, la forma ms rpida de programacin e incluso la
ms potente.
000
L D %10.1 Bp. Inicio ciclo
AND %10.0 Dp presencia vehculo
AND %M3 Bit. Autorizacin reloj calendario
Facultad de ingeniera Mecnica Elctrica
56
Monografa
Teora bsica de los PLC.
AND
AND
005
S
LD
AND
OR
R
0 1 0 LD
St
%10.5 Fc. Alto rodillo
%10.4 Fc. Detrs prtico.
%M0 Memo inicio ciclo
%M2
%10.5
%10.2 Bp. Parada ciclo.
%M0
%M0
%Q0.0 Piloto ciclo
Modelo de un Programa
3.14.-Descripcin por lista de instrucciones.
3.10.3.-Grafcet. (Sfc)
Es el llamado Grfico de Orden Etapa Transicin. Ha sido especialmente diseado
para resolver problemas de automatismos secuenciales. Las acciones son asociadas a
las etapas y las condiciones a cumplir a las transiciones. Este lenguaje resulta
enormemente sencillo de interpretar por operarios sin conocimientos de automatismos
elctricos.Muchos de los autmatas que existen en el mercado permiten la
programacin en GRAFCET, tanto en modo grfico o como por lista de instrucciones.
Tambin podemos utilizarlo para resolver problemas de automatizacin de forma terica
y posteriormente convertirlo a plano de contactos.
1
%10.2. %10.3
%10.3.
%10.2
3
%10.4
%10.5
Diagrama 3.15.-Modelo Grafcet.
3.10.4.-Plano De Funciones. (Fbd)
Facultad de ingeniera Mecnica Elctrica
57
Monografa
Teora bsica de los PLC.
El plano de funciones lgicas, resulta especialmente cmodo de utilizar, a tcnicos
habituados a trabajar con circuitos de puertas lgicas, ya que la simbologa usada en
ambos es equivalente.
Figura 3.16.-Plano de funciones
3.11.-Software de supervisin grfica.
La necesidad de Controlar en forma ms precisa y ptima los distintos procesos, junto
con la necesidad de incorporar elementos de supervisin e interaccin con los
diferentes elementos de control que intervienen en un proceso productivo, han hecho
nacer una serie de programas de supervisin grfica que permiten, mediante un PC o
una Red de Computadores ms compleja, monitorear y supervisar elementos tales
como PLCs, Adquisidores de Datos, Controladores, Convertidores de Frecuencia, etc.,
etc.. Estos programas de Supervisin Grfica permiten, mediante la generacin de
mmicos del proceso, Monitorear el estado de variables, trazar curvas de Tendencias en
tiempo real, generar archivos Histricos, generacin de Alarmas, generacin de
Reportes, etc. En general proporcionan los elementos bsicos de Control, Monitoreo y
Supervisin ms herramientas de desarrollo que permiten crear elementos adicionales
para la adaptacin del Software a los diferentes procesos productivos.
Facultad de ingeniera Mecnica Elctrica
58
Monografa
Teora bsica de los PLC.
Estos Software de Supervisin Grfica se comunican con nuestros elementos de control
mediante una lnea de comunicaciones de tipo estandarizada o mediante interfaces de
comunicaciones propietarias(diseadas por el fabricante).
3.12.-plataformas de implementacin.
Los Software de Supervisin inicialmente fueron concebidos en grandes sistemas de
control de tipo distribuido, montados sobre plataformas de hardware y de software
propietarias, esto es, en configuraciones de hardware, tanto de la arquitectura de los
controladores como de la red de comunicaciones, diseadas por el fabricante. As
tambin los Sistemas
Operativos soportantes eran Sistemas Operativos diseados
especialmente para el sistema y pocas veces se utilizaban Sistemas Operativos de tipo
comercial. Esta situacin ha cambiado en nuestros das, especialmente para
aplicaciones medianas a chicas, en el sentido de utilizar computadores personales y
redes de comunicaciones estndar para el monitoreo y supervisin de sistemas de
control.El Sistema Operativo soportante debe ser robusto, en el sentido de tener la
menor cantidad de fallas o Cadas con el fin de evitar la perdida de informacin del
sistema y la perdida de monitoreo y supervisin. El Sistema Operativo que presentaba,
tiempo atrs, la mejor performance en este aspecto era OS/2 de IBM y fue uno de los
Sistemas Operativos por excelencia para los software de supervisin, un ejemplo de
ello son:
Onspec
Monitor 77
Factory Link
La creciente popularidad de Windows, y sus mejoras con respecto a la robustez,
permiti que estos programas se implementaran en Sistemas Operativos ms
populares, es as como hoy en da las plataformas ms preferidas por los usuarios ( No
necesariamente la plataforma optima ) son en orden de popularidad.
Windows 3.11
Windows 95
Facultad de ingeniera Mecnica Elctrica
59
Monografa
WindowsNT
Unix
Dos
OS/2
Teora bsica de los PLC.
Y los sistemas ms populares para aplicaciones medianas a chicas, al menos en forma
local son:
Factory Link
Wonderware
Pcim
Paragon
Fix
Onspec
Genesis
3.13.-licencias en un software de supervisin .
La Mayora de los Software de Supervisin se componen de Mdulos que identifican las
diferentes funcionalidades de estos. A su vez cada mdulo se puede adquirir para dos
formas de trabajo, estas son:
Licencia RunTime
Licencia para Desarrollo
Licencia RunTime: Este modo corresponde al modulo destinado solamente para le
ejecucin final de la aplicacin, solo permite que la aplicacin sea ejecutada sin permitir
modificaciones o cambios en la aplicacin desarrollada.
Licencia para Desarrollo: Este modo de licencia permite la creacin de la aplicacin,
es decir en la fase de desarrollo y construccin de nuestra aplicacin debemos disponer
de este modo para los distintos mdulos que utilizaremos. Generalmente las fases de
desarrollo de una aplicacin se dividen en el desarrollo propiamente tal y la fase de
Facultad de ingeniera Mecnica Elctrica
60
Monografa
Teora bsica de los PLC.
ejecucin. Para la primera fase se necesita al menos una Licencia de Desarrollo para la
construccin de la aplicacin y tantas licencias RunTime como estaciones de trabajo se
requieran instalar.
3.14.-Mdulos en un software de supervisin.
La mayora de los Software de Supervisin Grfica se componen en mdulos que
proporcionan las diferentes herramientas para el desarrollo de aplicaciones, entre estas,
las ms importantes son:
Mdulo de Configuracin
Mdulo de Animacin Grfica
Mdulo de Tendencias en Tiempo Real
Mdulos de Generacin de Histricos
Mdulos de Gestin de Alarmas
Mdulos de Generacin de Reportes
Mdulo de Configuracin de Drivers
3.15.-Drivers en un Software de Supervisin.
Una de las misiones adicionales de un Software de Supervisin es la integracin y la
interaccin con dispositivos de control de distintos fabricantes, es as como estos
programas proporcionan compatibilidad con la mayora de los elementos de control que
existen en el mercado. La compatibilidad de realiza mediante la creacin de Mdulos de
Interface ( Drivers ) que ese encargan de la comunicacin del Software con el, o los
elementos de Control finales. Cada uno de estos Drivers se adquiere por separado y de
acuerdo a la marca y modelo del PLC o elemento final de control. La forma en
direccionar en el Software cada una de las variables vara con respecto al software,
aunque la mayora adopta el sistema de Tags Internos ( variables Internas en el
Software ) y tablas de relacin con las variables del PLC que se configuran en los
Drivers correspondientes.
Facultad de ingeniera Mecnica Elctrica
61
Monografa
Teora bsica de los PLC.
3.16.-El Procesador o CPU.
La unidad central de proceso o CPU (siglas que corresponden a las iniciales en ingls
de Central Processing Unit) es el componente principal de un PLC. La CPU se encarga
de realizar las operaciones de clculo y tambin de controlar el flujo de datos entre los
diversos elementos que forman un PLC. En un smil biolgico la unidad central de
proceso puede considerarse el corazn y el cerebro del ordenador.
Este se muestra en la composicin siguiente:
Figura 3.17.-Analoga entre un procesador y el cerebro
humano
Una unidad central de proceso bsica est constituida por un nico procesador que se
encarga de realizar las operaciones de clculo y de controlar el resto de dispositivos
que forman el PLC. La tecnologa actual permite integrar todos los elementos de un
procesador a escala reducida
en un slo componente que se denomina
microprocesador.
3.16.1.-Modo de operacin de un microprocesador.
En el microprocesador reside el poder ejecutivo del ordenador, pero slo puede
almacenar en su interior pequeas cantidades de datos. Cuando la cantidad de datos a
procesar es elevada se necesitar de un sistema de almacenamiento asociado al
microprocesador, que se denomina memoria principal.
El procesador en trminos funcionales es una caja negra que recibe como entrada
instrucciones y datos, produciendo como salida nuevos datos.
Facultad de ingeniera Mecnica Elctrica
62
Monografa
Teora bsica de los PLC.
Los datos son elaborados en su interior de acuerdo a un algoritmo expresado mediante
las instrucciones. El procesador ejecutando las instrucciones secuencialmente genera
como resultado los nuevos datos de salida.
Los datos de salida pueden ser ligeras modificaciones de los de entrada o incluso
copias de los mismos, aunque normalmente a la salida sern datos nuevos creados a
partir de la entrada y modificados de acuerdo a complejos algoritmos.
Nada impide que
los datos de salida puedan ser la codificacin de nuevas
instrucciones para el procesador.
Finalmente, los datos de salida producidos por el procesador se almacenan en el
sistema de memoria o se envan a los dispositivos perifricos que los necesiten y as lo
requieran. En un microprocesador de propsito general, la tarea a realizar se especifica
en un programa.
Un programa consiste en una secuencia de instrucciones, codificadas (cdigo mquina)
de acuerdo a un formato interpretable por el procesador.
El procesador slo ser capaz de ejecutar un conjunto bsico de instrucciones, cada
una de las cuales realiza una operacin elemental muy simple. El programa por tanto
ser la secuenciacin de las instrucciones elementales de tal manera que lleven a cabo
el algoritmo que describe la tarea que se desea realizar.
El proceso que deber realizar una microprocesador para ejecutar estos programas
puede subdividirse en los siguientes pasos:
Obtener el cdigo del programa a ejecutar y los datos desde algn lugar de
almacenamiento.
Realizar la elaboracin de los datos de entrada de acuerdo a las instrucciones
elementales que se encuentren codificadas en el programa. Estas instrucciones se
ejecutan una a una de manera secuencial.
Guardar el resultado de la manipulacin de los dados en algn medio de
almacenamiento o enviarlo a los dispositivos perifricos.
El esquema siguiente muestra como se compone un procesador de manera bsica:
Facultad de ingeniera Mecnica Elctrica
63
Monografa
Teora bsica de los PLC.
Esquema 3.18.- Partes de un procesador.
De este esquema se tiene lo siguiente:
La Unidad de Control es la encargada de realizar el control del proceso, es decir de
generar las seales necesarias para activar los componentes de la unidad de
tratamiento que actuarn sobre los datos en el instante de tiempo que corresponda.
Para su funcionamiento suele disponer de los siguientes elementos:
Decodificador de Instrucciones.
Registro Contador de Programa (PC) .
Registro de Instrucciones(IR).
Unidad Aritmtico Lgica (ALU).
Registro Acumulador (ACC).
Registros de propsito general.
Estos componentes aparecen en todos los procesadores de propsito general.
El Decodificador de Instrucciones es la unidad que interpreta el contenido del registro
de instrucciones y permite generar las seales adecuadas para ejecutar la instruccin.
Facultad de ingeniera Mecnica Elctrica
64
Monografa
Teora bsica de los PLC.
El Decodificador de Direcciones es la unidad que interpreta la direccin en el registro de
direcciones de Memoria MAR y selecciona la posicin de memoria a ser accedida.
Los registros son elementos de almacenamiento, donde se almacenan temporalmente
valores durante la ejecucin de un programa. En la unidad de control se dispone
generalmente de los siguientes registros:
Contador de Programa: Guarda la direccin de la siguiente instruccin a ser
ejecutada.
Registro de Instrucciones: Guarda la instruccin en curso de ejecucin.
Registro de Estado: Mantiene informacin "bits de estado" o " flags" con informacin
sobre lo que ha pasado en la operacin realizada por la ALU.
Registro de Direcciones de Memoria (MAR): Guarda la direccin del dato que va a
ser accedido en la memoria.
La Unidad Aritmtico Lgica es la unidad encargada de realizar las operaciones
matemticas, operaciones lgicas y comparaciones.
Internamente est formada por circuitos lgicos elementales para realizar estas
operaciones: sumas, incrementos, operaciones lgicas, desplazamientos, rotaciones,
comparaciones, etc.
3.16.2.-Tipos de procesadores
En los ltimos aos se distinguen dos grandes tendencias en la construccin de
procesadores. Se diferencan esencialmente en las caractersticas de su repertorio de
instrucciones.
1. Los procesadores CISC (Complex Instruction Set Computer) tienen un repertorio
con un nmero de instrucciones alto (200-300); estas instrucciones adems son ms
complejas que las de RISC, con lo que la circuitera necesaria para decodificacin y
secuenciacin tambin aumenta, y la velocidad del proceso disminuye. Como
ventaja, tenemos que se necesitan menos instrucciones para ejecutar una tarea
Facultad de ingeniera Mecnica Elctrica
65
Monografa
Teora bsica de los PLC.
Adems, el formato de las instrucciones es bastante variable (es decir, hay
bastantes formatos). Adems, el diseo hace que el procesador tenga que realizar
constantes accesos a memoria.
2. Los
procesadores
RISC
(Reduced
Instruction
Set
Computer)
tienen
caractersticas opuestas a los CISC. Su juego de instrucciones es ms reducido
(menos de 128), y las instrucciones son ms sencillas (con lo que se necesitarn
ms instrucciones para ejecutar una tarea). El formato de instrucciones es fijo (o
sern pocos formatos), con lo que el control del hardware es ms sencillo y se
facilita la colocacin de las instrucciones en la memoria, lo que implica que los
accesos a la memoria se aceleren. Por otra parte, estos accesos a memoria son
menos frecuentes ya que el procesador posee un mayor nmero de registros. Estos
procesadores son los que estn presentes en las estaciones de trabajo. Como
ejemplos podemos citar los procesadores ALPHA de Digital Equipment, y los
SuperSPARC y MicroSPARC de Sun Microsystems y Texas Instruments.
Relacionada con los conceptos RISC y CISC est la tcnica de segmentacin
("pipeline"); esta tcnica consiste en dividir la ejecucin de la instruccin en bloques
independientes que se ejecutan en paralelo. Es ms eficiente para los procesadores
RISC, aunque tambin se implementa en CISC. Para incrementar el rendimiento del
procesador se debe buscar instrucciones ejecutables en paralelo.
El sistema de carga de instrucciones debe analizar la secuencia de instrucciones que
entran al procesador y buscar instrucciones ejecutables en paralelo as como disear
un control que tenga en cuenta posibles dependencias de datos entre las instrucciones
a ejecutar en paralelo. Esto hace que el hardware se complique ms.
En resumen el CPU es la tarjeta electrnica ms importante de todas y va insertado en
una de las ranuras del chasis.
Como sistema se considera como la parte medular en el control del PLC ya que es el
que procesa toda la informacin que recibe de los mdulos de entradas y de acuerdo a
una lgica previamente determinada por el usuario ejecuta un programa de control,
Facultad de ingeniera Mecnica Elctrica
66
Monografa
Teora bsica de los PLC.
cuando termina de ejecutar este programa enva un resumen de seales de control de
salida para activar los mdulos de salida discretas.
Obviamente en el interior de la memoria del procesador reside toda la programacin
del sistema, para esto el CPU cuenta con mas de 80 instrucciones de alto nivel, cuenta
con
una
serie
de
rutinas
de
autoverificacin
para
diagnosticar
su
ptimo
funcionamiento, adicionalmente tiene una serie de puertos de comunicacin hacia el
exterior para poder enviar o recibir informacin de o hacia unidades remotas
dependientes del PLC.
3.16.3.-Clasificacin de la familia de los PLCs.
Por ltimo, la clasificacin de los PLC se identifican de la siguiente forma:
La familia de los PLCs pequeos conocidos comnmente como la familia
Micrologix 1000 proporciona controladores lgicos programables ms compactos y
econmicos. Estn disponibles en 16 E / S ( entradas y salidas) o 32 E / S en 5
diferentes configuraciones elctricas. Las opciones de E / S y las configuraciones
elctricas los hacen ideales para casi cualquier aplicacin.
La familia de los PLCs medianos conocidos comnmente como la familia SLC 500
ofrece una amplia gama de selecciones en capacidad de memoria, capacidad de E /
S, conjunto de instrucciones y puertos de comunicacin que permiten adecuar un
sistema de control a los requisitos especficos de las aplicaciones.
La familia de los PLCs grandes conocidos tambin la familia de controladores PLC5, estos controladores tienen los ms avanzados procesadores de una sola ranura,
cuentan con opciones de comunicacin incorporadas, que les permiten desarrollar
una arquitectura de control ms completa, de acuerdo a la aplicacin requerida.
La familia de los PLCs muy grandes conocidos tambin como la familia de los
controladores PLC-5/250, el procesador PLC-5/250 es el miembro ms grande de la
familia PLC-5 de controladores lgicos programables. Como miembro del sistema
Pyramid Integrator de Allen-Bradley, este procesador avanzado es ideal para
Facultad de ingeniera Mecnica Elctrica
67
Monografa
Teora bsica de los PLC.
aplicaciones de control integrado y procesamiento de base de datos muy grandes de
informacin.
3.16.-Ejemplo de un sistema de control a base de PLC.
En la figura siguiente se ilustra un circuito muy sencillo que consiste en un interruptor
como instrumento de campo de entrada, y se tiene como elemento de salida de campo
una lmpara de 110 Vac. Para conectar estos dos elementos se utiliza un sistema de
control (PLC) con los elementos que conforman.
Fuente de
Alimentacin
del PLC
5 Vcd
SW-1
MED
MSD
CPU
Entrada 1
PLC
L
Salida 1
+
-
24 Vcd
fuente de
Instrumentos
LAMPARA
110 Vac
60 Hz
Fuente de
instrumentos
Programa de control del PLC
*Si SW-1 se cierra entonces enciende LAMPARA
*Si SW-1 se abre entonces apaga LAMPARA.
Figura 3.19.-Ejemplo de un modelo de control.
Este ejemplo cubre los conceptos ms importantes hasta aqu descritos, tenindose de
cmo resumen que el elemento central y ms importante corresponde al procesador o
CPU, el cual es en esta tarjeta electrnica donde est alojado el programa de control
que puede ser modificado por el usuario en caso de requerirse otra lgica de control.
Resumiendo y siguiendo el flujo indicado por las flechas, cuando se cierra el interruptor
SW-1 se est enviando la seal al MED ( Modulo de entradas discretas) el cual
convierte esta seal de fuerza a una seal de control siendo enviada al procesador o
Facultad de ingeniera Mecnica Elctrica
68
Monografa
Teora bsica de los PLC.
CPU, para esto el procesador ya tiene dentro de su memoria un programa de control
que contempla a el interruptor SW-1 y a la LAMPARA.
En el mismo programa se ejecutaran las ordenes que ya tienen previamente
programadas, obedeciendo que cuando el interruptor SW-1 se cierre el programa tiene
la orden de enviar una seal de control hacia el MSD ( Mdulo de Salidas Discretas)
para que este la convierta en una seal de fuerza terminando por encender la lmpara
como se indica en la figura de arriba.
Facultad de ingeniera Mecnica Elctrica
69
Monografa
Teora bsica de los PLC.
TRATAMIENTO DEL TEMA.
El desarrollo del presente trabajo en su calidad de monografa se realiz como una
Investigacin fundamentada en documentacin escrita, recopilada y seleccionada de:
Bibliografa existentes encontradas en diferentes bibliotecas de la regin, algunas
en el idioma Ingls, realizndose las traducciones respectivas de algunos textos que
sirvieron de apoyo para complementar la informacin aqu escrita.
Se realiz de manera fundamental el uso y acceso de la red de comunicaciones mas
grande del mundo, el Internet y el cual permite estar a la vanguardia en los
conocimientos mas actualizados dentro de la ingeniera y la industria de control
moderna
As tambin se revisaron artculos y documentos que presentaron informacin sobre
el tema de tal modo que pudo extraerse aquella que de una u otra forma tena
relacin con los contenidos aqu tratados.
La informacin que se fue encontrando, se seleccion empleando una estructura con un
criterio propio de organizacin y definicin, pero literalmente factible de comprender por
el lector o usuario del texto.
Los sub-temas estn organizados de manera secuencial, es decir cada tema
desarrollado vincula el siguiente, salvo en aquellos casos en los cuales se acepta y
considera que el lector tiene conocimientos previos y bsicos de algunos conceptos que
permiten comprender los aqu tratados.
As tambin se anexaron fotografas, dibujos, esquemas, algoritmos y algunos modelos
grficos que permiten proporcionar al lector un panorama ms amplio y objetivo con
respecto a aquellos temas donde se requera ahondar en explicaciones mas detalladas
en aspectos tcnicos, manuales e informativos.
Tambien se trabaj con el uso y diseo de tablas que permiten mostrar algunas
referencias sobre datos importantes que determinan en su momento parmetros y
valores de operacin de algunos elementos importantes dentro de la operacin de los
PLCs.
Facultad de ingeniera Mecnica Elctrica
70
Monografa
Teora bsica de los PLC.
Es importante destacar que dentro del campo de la informacin con respecto a estos
dispositivos de control es muy amplia y como tal, no es fcil recuperarlo todo y mucho
menos expanderse a la misma, razn a esto, en el presente trabajo solamente se
realiz una extraccin de informacin que por su calidad de complemento presentan un
amplio panorama de lo es la tecnologa de los Dispositivos PLCs.
Esperando en el bien uso de este trabajo por aquellos estudiantes y toda aquella
persona con el deseo de conocer ms sobre estos dispositivos, dejo el mismo como un
paso ms en el proceso de enseanza-aprendizaje dentro de las aulas de la
Universidad, haciendo hincapi en que el conocimiento de cada uno de los lectores se
centra en su inters real dentro de la ingeniera de control.
Facultad de ingeniera Mecnica Elctrica
71
Monografa
Teora bsica de los PLC.
CAPITULO III
CONSIDERACIONES FINALES
El tema de los PLC es un tema actualmente muy amplio en lo que respecta a tecnologa
avanzada y de punta dentro del diseo de equipos enfocados a la Ingeniera del
Control, ya que cada da presentan mayor demanda y se piensa que en un futuro
lejano todos nuestras operaciones tcnicas y manuales van a estar sincronizadas,
ordenadas y determinadas por el uso de la tecnologa de los autmatas.
El presente trabajo solo es un compendio de la mucha informacin que puede
encontrarse tanto en manuales, libros, revistas tcnicas de ingeniera y sobre todo en la
gran va de la comunicacin que es nuestra red de Internet, informacin que ha sido
totalmente seleccionada, estructurada y presentada de manera eficiente para que toda
aquella persona interesada en este tema pueda consultar de modo rpido algn
concepto u otro aspecto de su inters.
Asimismo, es importante destacar que aqu, que en el estudiante que guste de conocer
ms acerca de estos dispositivos, persista el inters y el deseo por acercarse a este
mundo del automatismo y control que dentro de la Ingeniera actualmente est
causando una gran revolucin de conocimientos tanto tericos como prcticos y por lo
cual se recomienda al estudiante no desistir y si en cambio persistir por tomar ms
documentos y consultar mayor informacin que le permita adentrarse an ms a este
mundo de la Ingeniera del Control.
Facultad de ingeniera Mecnica Elctrica
72
Monografa
Teora bsica de los PLC.
BIBLIOGRAFA
1.- Ttulo : Nociones sobre la Aplicacin de PLCs al Control de Procesos Industriales.
Ramn Ferreiro Garca
Editorial F.D. Catalua, Espaa., 1999.
2.- Ttulo : Tcnicas de Automacin Industrial.
Jos Horta Santos.
Editorial CECSA, 1997.
3.- Ttulo : Introduccin a la Teora de autmatas lenguaje y computacin.
John E. Hopcroft
Jeffrey D. Ullman.
Editorial CECSA, 1993.
4.- Ttulo : Sistemas de Control.
Gene H. Hostetter
Clement J. Savant.
Editorial McGrawHill., 1995
5.- Ttulo : Sistemas Automticos de Control.
Benjamn C. Kuo.
Editorial CECSA, 1998.
6.- Ttulo : Ingeniera de Control Moderna.
Katsuhiko Ogata.
Editorial PRENTICE HALL INTERNATIONAL, 1982.
7.- Ttulo : Los Procesadores Programables. (Microprocesador).
Enrique Mandado
Editorial JFK, Catalua Espaa, 1997.
8.- Ttulo : Sistemas de Control en Tiempo Discreto.
Katsuhiko Ogata
Editorial PRENTICE HALL COMPANY, 1996.
Pginas Electrnicas de consulta :
9.- www.clas-sa.com
10.- www.directindustry.com
11.- www.fenz.es
12.- www.powerconv.alstom.com
Facultad de ingeniera Mecnica Elctrica
73
Monografa
Teora bsica de los PLC.
13.- www.ad.siemens
14.- www.adt.fr
15.- www.audiogil.es
16.- www.lanzadera.com
17.- www.plaquetodo.com
18.- www.metalunivers.com
19.- www.automatas.org
20.- www.bitmakers.com
21.- www.zabalnet.com
22.- www.diesia.uhu.es
23.- www.sasistel.es
24.- www.grupojar.com
25.- http://users.servicios.retecal.es
26.- http://scmstore.com
Facultad de ingeniera Mecnica Elctrica
74
Monografa
Teora Bsica de los PLC
ANEXOS
A continuacin se anexan algunos ejemplos de modelos que son posible encontrar en
el mercado de los PLCs, se hace referencia a algunas de sus caractersticas y
aplicaciones posibles.
GLOFA GM7
Hardware tipo bloque/ Capacidad de programa: 68Kb/ Puntos de E/S: modelos con
12E/8S, 18E/12S, 24E/16S, 36E/24S. Unidades de expansin de 6E/4.
2 canales RS-232C incorporados para interface con herramienta de programacin,
interface operario mquina, protocolo maestro-esclavo Modbus, UDP (Protocolo
definido por el usuario) para otros dispositivos como controladores de temperatura y
protocolos dedicados de LG.
Tres lenguajes de programacin: Lista de instrucciones (IL), diagrama de escalera
(LD) y diagrama de funciones secuenciales (SFC.)
Funciones de simulacin en el computador sin conexin al PLC.
Alta velocidad de procesamiento (0.5 s/paso)
Alto performance en tamao compacto.
Facultad de Ingeniera Mecnica Elctrica
Monografa
Teora Bsica de los PLC
Forma de operacin: ejecucin cclica de programas almacenados (hasta 100
programas en 1 CPU) e interrupcin para ejecucin de programas controlados por
eventos internos o externos.
Mltiples funciones especiales incorporadas: Contador de alta velocidad (1fase16Kpps, 2fases-8Kpps), salida de pulso (2Kpps max.) para aplicaciones de control
de posicionamiento simple y motores de paso, control PID con autotuning y sin
lmites de lazos, 8 entradas capta-pulsos de ancho pequeo (0.2ms), entradas para
interrupcin externa, reloj de tiempo real.
Unidades opcionales con funciones especiales: E/S analgicas (2canales/1canal),
potencimetro analgico para ajuste externo de valores de variables en el PLC,
unidad CNET para interfaces RS-232C RS-422/485, modo de comunicacin
maestro/esclavo MODBUS y comunicacin larga distancia de MODEM RS-232C.
Modelo CPM2C
El micro-PLC CPM2C de OMRON redefine la categora tradicional de los microPLCs pus se coloc la velocidad y funciones de comunicacin de un PLC grande
en esta unidad ultra compacta a un mnimo precio.
Los 33mm de ancho de los CPM2C le permite encajar en los espacios ms
pequeos, ofrece 119 instrucciones, mltiples opciones de comunicacin y
caractersticas de control de movimiento avanzadas.
Facultad de Ingeniera Mecnica Elctrica
Monografa
Teora Bsica de los PLC
Posee capacidad para manejar hasta 140 puntos de E/S, entradas de contador de
alta velocidad, salidas de pulso de 10 KHz e incorpora un puerto RS-232C.
Modelo SRM1
Increblemente pequeo, ideal para instalacin en lugares confinados.
El SRM1 es un PLC de E/S en red y distribuidas, es decir los terminales de E/S
pueden estar en forma remota en distintas partes de la mquina (extensin total:
100 mts) y la comunicacin se realiza por par trenzado lo cual reduce en gran
proporcin el cableado.
Tiene capacidad para manejar hasta 256 puntos E/S (128 entradas/128 salidas), la
velocidad de comunicacin puede ser de hasta 750 kbps, posee 4000 words de
memoria y 137 instrucciones.
La ingeniera de este PLC incluye los componentes necesarios para la solucin
completa de un grueso de aplicaciones comunes.
Tiene incorporado un puerto RS232-C para interconexin con un Computador,
Interface Operario-Mquina u otro SRM1.
Facultad de Ingeniera Mecnica Elctrica
Monografa
Teora Bsica de los PLC
PLC TSX
Es un PLC modular compacto, que responde de manera econmica en automatizacin
de mquinas con
requerimiento de hasta 250 E/S y que necesitan funciones
especficas de altas prestaciones, tales como E/S analgicas, contaje, regulacin,
posicionamiento, "dilogo" hombre-mquina y comunicaciones.
90-micro GE Fanuc
Designado como un miembro poderoso sucesivo de la familia de controladores de la
serie 90-30.
Facultad de Ingeniera Mecnica Elctrica
Monografa
Teora Bsica de los PLC
La serie 90 Micro PLC es un ideal camino para reemplazar relays y automatizar
pequeos procesos.
Hitachi H-200 Controlador Programable
El nuevo H-200 es el menor de la serie H (H-300/700/2000) para media o larga escala.
El H-200 tiene las caractersticas de la serie H, como:
Alta velocidad de procesamiento.
Fcil de usar.
Expandibilidad.
Exacto. Incorpora un reloj de tiempo real.
Fiable. Varias funciones de la serie H son incorporadas.
Poderoso. 2 lenguajes de programacin estn incorporados.
Modicon 984
Facultad de Ingeniera Mecnica Elctrica
Monografa
Teora Bsica de los PLC
Cada sistema de control 984 consiste de un PLC conectado a mdulos de E/S en las
plantas. Las E/S estn
cableadas a dispositivos sensores o switches conectados
directamente con su aplicacin. El 984 controla su aplicacin basado en datos
recibidos de las E/S de los mdulos donde se conectan los dispositivos.
Los mdulos de Entrada aceptan seales de dispositivos de campo y los convierten a
voltaje, que acepta el CPU del
PLC para que los procese. Los mdulos de salida
reciben seales del CPU y los convierten a voltajes o corrientes necesarios para activar
switches en la planta.
Autmata programable PCI-52B
Caractersticas :
Programable en Basic
Interface serie RS-232
6 salidas a rel de 10A con led indicador
8 entradas digitales optoacopladas con led indicador
display de 2 dgitos numricos
memoria ram esttica de 32k
capacidad de grabacin de memorias eprom
ampliable mediante Remote Expander
entrada de interrupcin tratable desde basic
Facultad de Ingeniera Mecnica Elctrica
Monografa
Teora Bsica de los PLC
salida de impresora serie
salida de seal pwm (audio o regulacin)
bus de ampliacin
posibilidad de programacin en ensamblador
posibilidad de compilar los programas basic
REMOTE EXPANDER
Caractersticas de todos los modelos:
4
entradas
analgicas
8bits
configurables
independientemente en 5V,10V,20mA,40mA
Salida analgica 8bits
Comunicacin serie I2C a 4 hilos a mas de 200 mts
Configuracin de 8 posibles direcciones.
Controlable desde PCI52B y desde PC con interface
PC I2C
Modelo 8 Out: 8 salidas digitales a rel de 10A con
led indicador
Modelo 8 In: 8 entradas digitales optoacopladas con
led indicador
Modelo 4Out/4In: 4 salidas y cuatro entradas iguales
a los anteriores
Facultad de Ingeniera Mecnica Elctrica
También podría gustarte
- Puesta en marcha de sistemas de automatización industrial. ELEM0311De EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Calificación: 3 de 5 estrellas3/5 (1)
- La mística ciudad de DiosDocumento461 páginasLa mística ciudad de DiosAlexandra JaramilloAún no hay calificaciones
- Tipos y Caracteristicas de TransformadoresDocumento40 páginasTipos y Caracteristicas de Transformadoresjony herreraAún no hay calificaciones
- Historia y aplicaciones de los PLCDocumento43 páginasHistoria y aplicaciones de los PLCKaren AriasAún no hay calificaciones
- Caso Construccion de La Derivacion de Una Linea de Tuberia para Transporte de PetroleoDocumento4 páginasCaso Construccion de La Derivacion de Una Linea de Tuberia para Transporte de PetroleoHugo Ferro Cuellar50% (2)
- Grafcet 1Documento42 páginasGrafcet 1Tatiana Ximena ParraAún no hay calificaciones
- BadenesDocumento56 páginasBadenesPaulo Cesar Atencia PopolizioAún no hay calificaciones
- Principios de La AutomatizaciónDocumento18 páginasPrincipios de La AutomatizaciónFabian PobletAún no hay calificaciones
- Practica # 7 Temporizador Con Retardo en El Apagado (LOGO) PDFDocumento8 páginasPractica # 7 Temporizador Con Retardo en El Apagado (LOGO) PDFDarwin EspinozaAún no hay calificaciones
- Acondicionadores de Señal PDFDocumento58 páginasAcondicionadores de Señal PDFSthefaniia Garzon OliiverosAún no hay calificaciones
- Unidad III - Estandar Iec 61131-3Documento37 páginasUnidad III - Estandar Iec 61131-3fadatamo2Aún no hay calificaciones
- Controladores Lógicos Programables (PLC)Documento12 páginasControladores Lógicos Programables (PLC)Jose Antonio Gonzalez VelasquezAún no hay calificaciones
- Estabilidad y Error en Estado EstacionarioDocumento12 páginasEstabilidad y Error en Estado EstacionarioCarlos OswaldoAún no hay calificaciones
- Unidad 3 Arduino - InddDocumento47 páginasUnidad 3 Arduino - InddBrian Marin100% (1)
- PLCDocumento14 páginasPLCManoloAún no hay calificaciones
- Diagramas eléctricos: alambrado y controlDocumento2 páginasDiagramas eléctricos: alambrado y controlKleber PintoAún no hay calificaciones
- PLANEACIÓN PRODUCCIÓN FRIDOSADocumento38 páginasPLANEACIÓN PRODUCCIÓN FRIDOSAKimberly Kamala89% (9)
- Sistemas neumáticos básicosDocumento76 páginasSistemas neumáticos básicosJirusCodinAún no hay calificaciones
- Tesis CortadoraDocumento46 páginasTesis CortadoraListudent60% (5)
- Clase 15Documento4 páginasClase 15Divar CamposAún no hay calificaciones
- Manual Arien Serie-187 (Spanish) (A3310-A3305)Documento75 páginasManual Arien Serie-187 (Spanish) (A3310-A3305)Jose SoMar100% (1)
- Fundamentals of industrial communications in automationDe EverandFundamentals of industrial communications in automationAún no hay calificaciones
- Automatismo de Control para El Acceso A Un GarajeDocumento16 páginasAutomatismo de Control para El Acceso A Un GarajeCesar Alfonso Saldivar MontoyaAún no hay calificaciones
- Circuitos hidráulicos y neumáticos: Reporte de práctica 3Documento13 páginasCircuitos hidráulicos y neumáticos: Reporte de práctica 3Edwin LeonAún no hay calificaciones
- Sensores EléctricosDocumento12 páginasSensores EléctricosSebastian Riquelme RodriguezAún no hay calificaciones
- Marco TeóricoDocumento4 páginasMarco TeóricoKevin Chavez ChavezAún no hay calificaciones
- Automatización Industrial, beneficios y desafíos de la Industria 4.0Documento3 páginasAutomatización Industrial, beneficios y desafíos de la Industria 4.0ERICKA ALEXANDRA CALIX FERNANDEZAún no hay calificaciones
- Números Utilizados en Electrónica DigitalDocumento21 páginasNúmeros Utilizados en Electrónica DigitalRogelio Lozano RamosAún no hay calificaciones
- Construcción y materiales de calibres Pasa y No Pasa para control dimensionalDocumento10 páginasConstrucción y materiales de calibres Pasa y No Pasa para control dimensionalRamiro Di PintoAún no hay calificaciones
- ,,,Documento37 páginas,,,Erick Romucho SánchezAún no hay calificaciones
- TM - Funciones Auxiliares de Automatismo - Cursos - Zelio Logic - Manual Zelio C6 ZelioSoft Bloques de F PDFDocumento13 páginasTM - Funciones Auxiliares de Automatismo - Cursos - Zelio Logic - Manual Zelio C6 ZelioSoft Bloques de F PDFArturo FuentesAún no hay calificaciones
- PLC - ZelioDocumento19 páginasPLC - ZelioDavid Cez OchoaAún no hay calificaciones
- Manual de Prácticas Maquinas Electricas y Disp Electronicos - Ver - 2017Documento36 páginasManual de Prácticas Maquinas Electricas y Disp Electronicos - Ver - 2017MARIO ANDRES REYES GONZALEZAún no hay calificaciones
- 12 Controladores Logicos FESTO - Puesta A Punto - Comunicación PLCDocumento14 páginas12 Controladores Logicos FESTO - Puesta A Punto - Comunicación PLCcarlos.otiniano9811Aún no hay calificaciones
- Puertas LogicasDocumento33 páginasPuertas Logicaspunkrocker521Aún no hay calificaciones
- C02.00-Materiales y Sus PropiedadesDocumento40 páginasC02.00-Materiales y Sus Propiedadesorigen_17Aún no hay calificaciones
- Tempo Riz AdoresDocumento8 páginasTempo Riz AdoresjoseAún no hay calificaciones
- Mecanizado de cuadros eléctricos CFP Nuestra Señora de las MercedesDocumento16 páginasMecanizado de cuadros eléctricos CFP Nuestra Señora de las MercedesChester Noel Brenes AguirreAún no hay calificaciones
- Maquinas Mov RectoDocumento12 páginasMaquinas Mov RectoPablitoAún no hay calificaciones
- 06 - Error en Estado Estable o Estacionario ELT PDFDocumento11 páginas06 - Error en Estado Estable o Estacionario ELT PDFeveiroAún no hay calificaciones
- Rectificación de media onda no controlada con carga resistiva: análisis y cálculo de parámetrosDocumento8 páginasRectificación de media onda no controlada con carga resistiva: análisis y cálculo de parámetrosYeser HidalgoAún no hay calificaciones
- Tarea GRAFCETDocumento5 páginasTarea GRAFCETJessica LeivaAún no hay calificaciones
- Guía circuitos electroneumáticos sensores proximidadDocumento7 páginasGuía circuitos electroneumáticos sensores proximidadErick CollazosAún no hay calificaciones
- Diseño de Manual de Prácticas Con Estación de Control 762cnaDocumento69 páginasDiseño de Manual de Prácticas Con Estación de Control 762cnaLuisAlbertoRendón100% (1)
- Prácticas Automatizacion Industrial PDFDocumento42 páginasPrácticas Automatizacion Industrial PDFTomas LosadaAún no hay calificaciones
- Símbolos de Transformadores EléctricosDocumento2 páginasSímbolos de Transformadores EléctricosBrain Magdaleno DazaAún no hay calificaciones
- Programación I PLC - Carlos Gustavo Pérez ZuñigaDocumento45 páginasProgramación I PLC - Carlos Gustavo Pérez ZuñigaCarlos Gustavo PérezAún no hay calificaciones
- Informe de RebobinadoDocumento22 páginasInforme de RebobinadoMario SandovalAún no hay calificaciones
- Sistema de Control de Posicion Motor C.D.Documento8 páginasSistema de Control de Posicion Motor C.D.Yoleiba Nava100% (1)
- Historia de La AutomatizacionDocumento12 páginasHistoria de La AutomatizacionLuis Eduardo Barbosa TorresAún no hay calificaciones
- Sistema de ControlDocumento6 páginasSistema de ControlEimer SalgueroAún no hay calificaciones
- Sistemas de Unidades, MetrologiaDocumento48 páginasSistemas de Unidades, MetrologialuisAún no hay calificaciones
- Sistemas neumáticos e hidráulicosDocumento55 páginasSistemas neumáticos e hidráulicosSantiago LealAún no hay calificaciones
- Tecnología neumática automatizaciónDocumento21 páginasTecnología neumática automatizaciónferni_niAún no hay calificaciones
- Guía Enlace Codesys V2.3 FestofluidsimDocumento19 páginasGuía Enlace Codesys V2.3 FestofluidsimRicardo Ricce VictorioAún no hay calificaciones
- 1 Curso de PLC SDocumento6 páginas1 Curso de PLC Scesarmaterano_uftAún no hay calificaciones
- 6 - Controlabilidad PDFDocumento23 páginas6 - Controlabilidad PDFBrayanAún no hay calificaciones
- Automatizacion IndustrialDocumento22 páginasAutomatizacion IndustrialCarlos Roberto HentscholekAún no hay calificaciones
- Reporte de CodigoDocumento13 páginasReporte de CodigoDavid Alc CAún no hay calificaciones
- Automatizacion de Un Semaforo PDFDocumento16 páginasAutomatizacion de Un Semaforo PDFAlex Eduardo moya MartínezAún no hay calificaciones
- APLICACIONES de Los TransformadoresDocumento5 páginasAPLICACIONES de Los TransformadoresEsteban RiosAún no hay calificaciones
- Amplificadores Operacionales ECUACIONESDocumento3 páginasAmplificadores Operacionales ECUACIONESChristian Flores RAún no hay calificaciones
- Nuevo Sistema de Control Calderas PDFDocumento28 páginasNuevo Sistema de Control Calderas PDFLuis AxlAún no hay calificaciones
- ElectroneumáticaDocumento19 páginasElectroneumáticaBenavides NestorAún no hay calificaciones
- 6.circuitos de Corriente Alterna - V2 PDFDocumento47 páginas6.circuitos de Corriente Alterna - V2 PDFluisaAún no hay calificaciones
- Controll Electr8nicoDocumento3 páginasControll Electr8nicoKike ZCAún no hay calificaciones
- Tarea de Potencia WT Sad DWDocumento7 páginasTarea de Potencia WT Sad DWKike ZCAún no hay calificaciones
- Tipo de Conexion de Los TransformadoreSs en El Lado de Generacion y de RecepcionDocumento3 páginasTipo de Conexion de Los TransformadoreSs en El Lado de Generacion y de RecepcionKike ZCAún no hay calificaciones
- Qué Le Sucederá A Los Que Nunca Oyeron de JesúsDocumento7 páginasQué Le Sucederá A Los Que Nunca Oyeron de JesúsKike ZCAún no hay calificaciones
- InsrlaicoensDocumento3 páginasInsrlaicoensKike ZCAún no hay calificaciones
- Leccion 1.9.2Documento27 páginasLeccion 1.9.2Kike ZCAún no hay calificaciones
- Tema - A II Fase ElectronicosDocumento1 páginaTema - A II Fase ElectronicosKike ZCAún no hay calificaciones
- Definicion de Una SucesionDocumento19 páginasDefinicion de Una SucesionKike ZCAún no hay calificaciones
- CAP 1 IntroduccDocumento40 páginasCAP 1 IntroduccJesus Alvarez BravoAún no hay calificaciones
- Contaminacion Por PlomoDocumento10 páginasContaminacion Por PlomoKike ZCAún no hay calificaciones
- Instalación Eléctricas en ViviendasDocumento32 páginasInstalación Eléctricas en ViviendasFrancisco GarcíaAún no hay calificaciones
- 10Documento20 páginas10Kike ZCAún no hay calificaciones
- Cir Elctro II FaseDocumento30 páginasCir Elctro II FaseKike ZCAún no hay calificaciones
- Lab N - 6 - Programaci+ N Visual C++ - Arreglos Vectores - 2011-IDocumento5 páginasLab N - 6 - Programaci+ N Visual C++ - Arreglos Vectores - 2011-IKike ZCAún no hay calificaciones
- Examen 1Documento2 páginasExamen 1Jonathan LoayzaAún no hay calificaciones
- Definicion de Una SucesionDocumento19 páginasDefinicion de Una SucesionKike ZCAún no hay calificaciones
- L2205Documento2 páginasL2205Kike ZCAún no hay calificaciones
- Informe PrevioDocumento10 páginasInforme PrevioKike ZCAún no hay calificaciones
- Ejercicios de Mecanica ComputacionalDocumento15 páginasEjercicios de Mecanica ComputacionalKike ZCAún no hay calificaciones
- Guia Medidas N7Documento4 páginasGuia Medidas N7Kike ZCAún no hay calificaciones
- Informe 9 FISICAIIDocumento11 páginasInforme 9 FISICAIIKike ZCAún no hay calificaciones
- Tema - A II Fase ElectronicosDocumento1 páginaTema - A II Fase ElectronicosKike ZCAún no hay calificaciones
- Tema - A II Fase ElectronicosDocumento1 páginaTema - A II Fase ElectronicosKike ZCAún no hay calificaciones
- Informe PrevioDocumento10 páginasInforme PrevioKike ZCAún no hay calificaciones
- Cobertura de MercadoDocumento2 páginasCobertura de MercadoRuth Carolina SatzAún no hay calificaciones
- Estructura Del Trabajo Final ComprasDocumento2 páginasEstructura Del Trabajo Final ComprasNelva SilviaAún no hay calificaciones
- Provincia de Carlos Fermin FitzcarraldDocumento6 páginasProvincia de Carlos Fermin FitzcarraldBryan A. Rosario PintoAún no hay calificaciones
- 04 204 FLSmidth Krebs GMAX Hydrocyclones 4-19-17 SPANISH WebDocumento4 páginas04 204 FLSmidth Krebs GMAX Hydrocyclones 4-19-17 SPANISH WebJonathan Atamari ViAún no hay calificaciones
- Venta de propiedad y ofertas de pago con interesesDocumento2 páginasVenta de propiedad y ofertas de pago con interesesÁngel Gabriel Rubio SalazarAún no hay calificaciones
- Qué Son Los LogaritmosDocumento2 páginasQué Son Los LogaritmosmayocaseraAún no hay calificaciones
- 4 Diagrama MorfolgicoDocumento7 páginas4 Diagrama MorfolgicoaxelAún no hay calificaciones
- Conceptos Históricos y Teorías Del DolorDocumento7 páginasConceptos Históricos y Teorías Del DolorGraciela AcuñaAún no hay calificaciones
- Excel para Contadores y Administradores.Documento4 páginasExcel para Contadores y Administradores.danielaAún no hay calificaciones
- Artrosis de Rodilla - Universidad CentralDocumento27 páginasArtrosis de Rodilla - Universidad CentralMiguel Angel Luna cusiAún no hay calificaciones
- Modelo matemático pago salarial unidades producidasDocumento5 páginasModelo matemático pago salarial unidades producidasCrismel27Aún no hay calificaciones
- Resumen Clasificación de Los Argumentos JurídicosDocumento2 páginasResumen Clasificación de Los Argumentos JurídicoscarlosAún no hay calificaciones
- Los Giros Lingüísticos y Vicios Del LenguajeDocumento10 páginasLos Giros Lingüísticos y Vicios Del LenguajearielAún no hay calificaciones
- Rigidez Ejercicios Resueltos Parte 1 128140 Downloable 936980Documento16 páginasRigidez Ejercicios Resueltos Parte 1 128140 Downloable 936980JAIME JOSE CHIPANA SORIAAún no hay calificaciones
- TEMARIO Excel FinancieroDocumento2 páginasTEMARIO Excel Financieroluis cabrera100% (1)
- Ayurveda - El Arte de Vivir ArgentinaDocumento2 páginasAyurveda - El Arte de Vivir ArgentinamarungodoyAún no hay calificaciones
- Ejemplo de Presentacion de ProyectoDocumento30 páginasEjemplo de Presentacion de ProyectomilagrosAún no hay calificaciones
- Matriz DhiDocumento5 páginasMatriz DhiDiego MolinaAún no hay calificaciones
- Técnica y Arte - El Desafío de La Investigación SocialDocumento7 páginasTécnica y Arte - El Desafío de La Investigación SocialPEPE CASADOAún no hay calificaciones
- Taller. Combustibles y Lubricantes.Documento8 páginasTaller. Combustibles y Lubricantes.Mariangel GaleaAún no hay calificaciones
- Adhesion en OdontologiaDocumento5 páginasAdhesion en OdontologiaCristian PazAún no hay calificaciones
- Resistencia de Materiales: Practica Final sobre Esfuerzos Cortantes y Momentos FlectoresDocumento6 páginasResistencia de Materiales: Practica Final sobre Esfuerzos Cortantes y Momentos FlectoresMicael RDAún no hay calificaciones
- Breve Historia - Introducción A JavaScript - LibrosWeb - EsDocumento1 páginaBreve Historia - Introducción A JavaScript - LibrosWeb - EsBell ZHAún no hay calificaciones
- S3 DiafragmasDocumento11 páginasS3 Diafragmasbrlscr -Aún no hay calificaciones
- Manual de Transmision Datos Comunes WEBDocumento18 páginasManual de Transmision Datos Comunes WEBMax ReinerAún no hay calificaciones
- FP092 CP CO Plantilla Esp - v1r1Documento2 páginasFP092 CP CO Plantilla Esp - v1r1Pamela Polanco0% (1)