También podría gustarte
- Tarea LeoDocumento1 páginaTarea LeoErick GallupeAún no hay calificaciones
- Fractales - PubliDocumento9 páginasFractales - PubliErick GallupeAún no hay calificaciones
- Cereales Legumbres PDFDocumento6 páginasCereales Legumbres PDFOscar GutierrezAún no hay calificaciones
- 2 DDocumento19 páginas2 DMoni MorenoAún no hay calificaciones
- Práctica Calificada N°02Documento1 páginaPráctica Calificada N°02Erick GallupeAún no hay calificaciones
- Norma de Codex para CEREALSDocumento125 páginasNorma de Codex para CEREALSAlfredo RojasAún no hay calificaciones
- Antenas fractales: Propiedades y aplicacionesDocumento6 páginasAntenas fractales: Propiedades y aplicacionesraul_mauAún no hay calificaciones
- Expo Tema VlanDocumento12 páginasExpo Tema VlanErick GallupeAún no hay calificaciones
- Costos JuanDocumento2 páginasCostos JuanErick GallupeAún no hay calificaciones
- Redes WirelessDocumento324 páginasRedes WirelessKristian Gonzales0% (1)
- Formato de Hoja de VidaDocumento2 páginasFormato de Hoja de VidaSebastian ObandoAún no hay calificaciones
- Tratamiento Digital de Señales 4 Ed. - John G. Proakis, Dimitris G. ManolakisDocumento996 páginasTratamiento Digital de Señales 4 Ed. - John G. Proakis, Dimitris G. ManolakisLuis Enrique Mentado OlveraAún no hay calificaciones
- Ejercicios Series de Furier - GALLUPE CALDERON ERYKDocumento1 páginaEjercicios Series de Furier - GALLUPE CALDERON ERYKErick GallupeAún no hay calificaciones
- Costos de RedesDocumento3 páginasCostos de RedesErick GallupeAún no hay calificaciones
- Motores ElectricosDocumento29 páginasMotores ElectricosErick GallupeAún no hay calificaciones
- Ejercicio de Modulacion de AmplitudDocumento2 páginasEjercicio de Modulacion de AmplitudErick GallupeAún no hay calificaciones
- 10 Transformada FourierDocumento90 páginas10 Transformada FourierEdgar Vivanco MejiaAún no hay calificaciones
- Muestreo 1230701255367094 2Documento45 páginasMuestreo 1230701255367094 2jeannteAún no hay calificaciones
- Diodo Rectificador de Media OndaDocumento11 páginasDiodo Rectificador de Media OndaErick GallupeAún no hay calificaciones
- Ejercicio de Modulacion de AmplitudDocumento2 páginasEjercicio de Modulacion de AmplitudErick GallupeAún no hay calificaciones
- FefeDocumento77 páginasFefeErick GallupeAún no hay calificaciones
- El Continente Africano África Es El Tercer Continente Del Mundo Por Extensión GeográficaDocumento3 páginasEl Continente Africano África Es El Tercer Continente Del Mundo Por Extensión GeográficaErick GallupeAún no hay calificaciones
- Teoria de Redes-Diagrama de Bode-Gallupecalderon ErykDocumento2 páginasTeoria de Redes-Diagrama de Bode-Gallupecalderon ErykErick GallupeAún no hay calificaciones
- Billetes Dolares 1Documento20 páginasBilletes Dolares 1Erick GallupeAún no hay calificaciones
- Alimentos Cáncer de Cuello UterinoDocumento3 páginasAlimentos Cáncer de Cuello UterinoErick GallupeAún no hay calificaciones
- Cano LaplaceDocumento2 páginasCano LaplaceErick GallupeAún no hay calificaciones
- Análisis LiterarioDocumento13 páginasAnálisis LiterarioErick GallupeAún no hay calificaciones
- Centro de Origen Elvis Ramirez CernaDocumento4 páginasCentro de Origen Elvis Ramirez CernaErick GallupeAún no hay calificaciones
- Monitoreo Ambiental ParticipativoDocumento17 páginasMonitoreo Ambiental ParticipativoMaria LopezAún no hay calificaciones
- Capitulo IIDocumento6 páginasCapitulo IIalexander huayllahua lomasAún no hay calificaciones
- Insumos Ficha 13Documento10 páginasInsumos Ficha 13Alexander LisjuanAún no hay calificaciones
- Español 3Documento7 páginasEspañol 3Luzma Maya MayaAún no hay calificaciones
- Laboratorio Evidencia 2Documento3 páginasLaboratorio Evidencia 2Maritza VillarrealAún no hay calificaciones
- CertificadoDocumento2 páginasCertificadoJESUS FRANCISCO SIERRA MOLINAAún no hay calificaciones
- 2023 EZVIZ Product Catalog - LowDocumento102 páginas2023 EZVIZ Product Catalog - Lowluis carlosAún no hay calificaciones
- Evaluación Del Capítulo 8 - Cybersecurity Essentials - CR - Ricardo - LópezDocumento17 páginasEvaluación Del Capítulo 8 - Cybersecurity Essentials - CR - Ricardo - LópezAndres DuarteAún no hay calificaciones
- Transformadores trifásicos secosDocumento7 páginasTransformadores trifásicos secosluis fernando enriquez cordobaAún no hay calificaciones
- Ing Soto Guia Labo Suelos 1-35-43Documento9 páginasIng Soto Guia Labo Suelos 1-35-43manuel ruizAún no hay calificaciones
- Informe Ejecutivo A1Documento3 páginasInforme Ejecutivo A1Diana MAún no hay calificaciones
- Uso de dispositivos móviles por directivosDocumento5 páginasUso de dispositivos móviles por directivosJavi PulgarinAún no hay calificaciones
- Tesis de Harry Modificada23 - 03Documento132 páginasTesis de Harry Modificada23 - 03jhunAún no hay calificaciones
- Manual Sistema RNDC 2022Documento57 páginasManual Sistema RNDC 2022trafico tcexAún no hay calificaciones
- Algoritmos y Estructuras de Datos en C++Documento177 páginasAlgoritmos y Estructuras de Datos en C++johnAún no hay calificaciones
- OPT y TOCDocumento8 páginasOPT y TOCGiovanni VitaleAún no hay calificaciones
- 04 - ASiDocumento47 páginas04 - ASiChucho Cast FAún no hay calificaciones
- CPS MT69 - ManualDocumento2 páginasCPS MT69 - ManualalfredjajAún no hay calificaciones
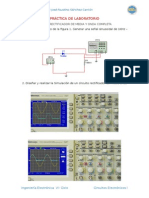
- Tarea Electronica de Potencia PDFDocumento4 páginasTarea Electronica de Potencia PDFKevin EstradaAún no hay calificaciones
- Alinear El Texto en Una CeldaDocumento4 páginasAlinear El Texto en Una CeldajAún no hay calificaciones
- Estudio Topografico CañapayDocumento15 páginasEstudio Topografico CañapaySamir Ochoa SoteloAún no hay calificaciones
- Tecnología de Punta en Hardware y TelecomunicacionesDocumento19 páginasTecnología de Punta en Hardware y TelecomunicacionesLeo CaztilloAún no hay calificaciones
- 12 FORMATO MATRIZ - Acta de Recorrido Seguridad Industrial DICIEMBRE 2021Documento4 páginas12 FORMATO MATRIZ - Acta de Recorrido Seguridad Industrial DICIEMBRE 2021Fabian Haro CamposAún no hay calificaciones
- Manual de Servicio TTR 150 Sistema de CombustibleDocumento27 páginasManual de Servicio TTR 150 Sistema de CombustibleHayler Raul Ariza MarinAún no hay calificaciones
- Diagrama de Ishikawa Todas Las Empresas Wilfrido ColliDocumento4 páginasDiagrama de Ishikawa Todas Las Empresas Wilfrido ColliJuan Elías Salazar GonzálezAún no hay calificaciones
- Evaluacion Leccion 1 Gestion de Tecnologia Unidad 2Documento8 páginasEvaluacion Leccion 1 Gestion de Tecnologia Unidad 2ale ramirez100% (2)
- TALLER UNIDAD 1 Riesgo ElectricoDocumento10 páginasTALLER UNIDAD 1 Riesgo ElectricoPaolita MinaAún no hay calificaciones
- 1II135 - Examen Semestral 2021 - Procesos de FlujoDocumento3 páginas1II135 - Examen Semestral 2021 - Procesos de FlujoTomas SuiraAún no hay calificaciones
- Operación excavadora oruga ColombiaDocumento38 páginasOperación excavadora oruga Colombianelson rinconAún no hay calificaciones
- Cortesía (Expresión Linguística)Documento18 páginasCortesía (Expresión Linguística)Laura MontónAún no hay calificaciones