También podría gustarte
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (894)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Construction KPIs & Dashboards PDFDocumento33 páginasConstruction KPIs & Dashboards PDFHassenL100% (4)
- Substation DesignDocumento764 páginasSubstation Designprashious100% (2)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Power Factor Management Scheme Is Best Described Here.Documento42 páginasPower Factor Management Scheme Is Best Described Here.Sunil SinghAún no hay calificaciones
- E 121 ContentDocumento9 páginasE 121 ContentAnonymous KDUqWGAún no hay calificaciones
- 33kv Cont.& Rel. Panel SpecsDocumento26 páginas33kv Cont.& Rel. Panel SpecsRamesh AnanthanarayananAún no hay calificaciones
- PDH - e 139Documento26 páginasPDH - e 139HassenLAún no hay calificaciones
- Section14 0307Documento18 páginasSection14 0307HassenLAún no hay calificaciones
- Automatic Control Part IDocumento22 páginasAutomatic Control Part IDennis ArhinAún no hay calificaciones
- PDH - e 143Documento10 páginasPDH - e 143HassenLAún no hay calificaciones
- PDH - e 140Documento30 páginasPDH - e 140HassenLAún no hay calificaciones
- PDH - e 123Documento6 páginasPDH - e 123HassenLAún no hay calificaciones
- E 113Documento122 páginasE 113HassenLAún no hay calificaciones
- Section13 0307Documento3 páginasSection13 0307HassenLAún no hay calificaciones
- Section15 0307Documento2 páginasSection15 0307Flores JesusAún no hay calificaciones
- Emergency and Standby Power Systems Design and Code RequirementsDocumento14 páginasEmergency and Standby Power Systems Design and Code RequirementsSteffanie Jorj EspirituAún no hay calificaciones
- Section11 0307Documento6 páginasSection11 0307AmitabhaAún no hay calificaciones
- Power Distribution EquipmentsDocumento12 páginasPower Distribution EquipmentsAlyAún no hay calificaciones
- Section12 0307Documento8 páginasSection12 0307narcisomoroAún no hay calificaciones
- AC Motors, Motor Control and Motor ProtectionDocumento25 páginasAC Motors, Motor Control and Motor Protectionwira eka0% (1)
- Section7 0307Documento45 páginasSection7 0307apic20Aún no hay calificaciones
- Schneider Load PlanningDocumento6 páginasSchneider Load Planningshadi22Aún no hay calificaciones
- Ungrounded SystemDocumento13 páginasUngrounded SystemSaurabh Kumar SinghAún no hay calificaciones
- PDH - e 284Documento21 páginasPDH - e 284HassenLAún no hay calificaciones
- Section5 0307Documento11 páginasSection5 0307Jessica DeanAún no hay calificaciones
- Section2 0307Documento15 páginasSection2 0307M.Senthil VelavanAún no hay calificaciones
- Calculating Motor Starting Times Using Torque and Current Exponent RatiosDocumento0 páginasCalculating Motor Starting Times Using Torque and Current Exponent RatiosmicrefeeAún no hay calificaciones
- ANSI - US Voltage StandardsDocumento4 páginasANSI - US Voltage Standardslouie mabiniAún no hay calificaciones
- Section1 0307Documento3 páginasSection1 0307M.Senthil VelavanAún no hay calificaciones
- PDS in ElectricalDocumento16 páginasPDS in ElectricalPepe Garcia EstebezAún no hay calificaciones
- PDH - e 162Documento13 páginasPDH - e 162HassenLAún no hay calificaciones
- Lecture5 Chapter2 - Positive and Negative LogicDocumento11 páginasLecture5 Chapter2 - Positive and Negative LogicAyesha HussainAún no hay calificaciones
- Transformer FundamentalsDocumento6 páginasTransformer FundamentalsAditya TiwariAún no hay calificaciones
- Active Filter LabDocumento10 páginasActive Filter LabHimmawan Sabda MaulanaAún no hay calificaciones
- 5 Pen PC Technology PDFDocumento8 páginas5 Pen PC Technology PDFNikitha ReddyAún no hay calificaciones
- C&MI - Lecture 1Documento12 páginasC&MI - Lecture 1Mourougapragash Subramanian0% (1)
- Safemine Cas 2011Documento56 páginasSafemine Cas 2011DEEPAK GOYALAún no hay calificaciones
- Ficha Tecnica BateriasDocumento2 páginasFicha Tecnica Bateriasbryan arancibiaAún no hay calificaciones
- Power Link BudgetDocumento6 páginasPower Link BudgetAditya FebriawanAún no hay calificaciones
- En User Guide Dell P2417HDocumento13 páginasEn User Guide Dell P2417Hsupriyo110Aún no hay calificaciones
- SMARDT Catalogue Ta ClassDocumento18 páginasSMARDT Catalogue Ta ClassAlhgasjsghjagjsdajlsd AsdalsdlkaksdAún no hay calificaciones
- 6 16Documento2 páginas6 16Indira KarimovaAún no hay calificaciones
- Gate 2014 Syllabus For Instrumentation Engineering inDocumento6 páginasGate 2014 Syllabus For Instrumentation Engineering inrahulchangderAún no hay calificaciones
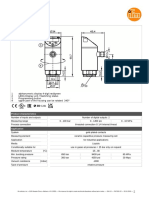
- PN7092 Pressure Sensor DisplayDocumento5 páginasPN7092 Pressure Sensor DisplayEslam YehiaAún no hay calificaciones
- TeSys K Control Relay 4 NO 24V DC Data SheetDocumento2 páginasTeSys K Control Relay 4 NO 24V DC Data Sheetsherub wangdiAún no hay calificaciones
- M268 Guide en-USDocumento6 páginasM268 Guide en-USwaynemercer000Aún no hay calificaciones
- Measurements & Electronic Instruments Laboratory Experiment ManualDocumento3 páginasMeasurements & Electronic Instruments Laboratory Experiment Manualfirst lastAún no hay calificaciones
- Technical Reference Manual: Protect Line Distance Protection Terminal REL 521 2.5Documento426 páginasTechnical Reference Manual: Protect Line Distance Protection Terminal REL 521 2.5george_cpp2Aún no hay calificaciones
- Abp - Electric Current Circuits Multiple ChoiceDocumento11 páginasAbp - Electric Current Circuits Multiple Choice羅天佑Aún no hay calificaciones
- LA210P Pro Loudspeaker CE-LVD Test ReportDocumento73 páginasLA210P Pro Loudspeaker CE-LVD Test ReportJL EN CONCIERTOAún no hay calificaciones
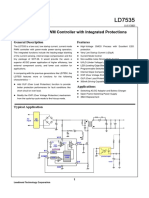
- Green-Mode PWM Controller With Integrated Protections: General Description FeaturesDocumento18 páginasGreen-Mode PWM Controller With Integrated Protections: General Description FeaturesRUSLANAún no hay calificaciones
- SI1154U Starters and AlternatorsDocumento10 páginasSI1154U Starters and AlternatorsNickAún no hay calificaciones
- Tutorial 3 VFD Motor AdvancedDocumento20 páginasTutorial 3 VFD Motor AdvancedTrần Nguyên KhảiAún no hay calificaciones
- Addis Ababa University Addis Ababa Institute of TechnologyDocumento56 páginasAddis Ababa University Addis Ababa Institute of TechnologyFìrœ Lōv MånAún no hay calificaciones
- CW Drive Test and Model Tuning ReportDocumento21 páginasCW Drive Test and Model Tuning Reportabhay100% (4)
- Casio CTK-2000 Service Manual and Parts ListDocumento27 páginasCasio CTK-2000 Service Manual and Parts ListEngkiong Go100% (3)
- LEACH (Low-Energy Adaptive Clustering Hierarchy)Documento33 páginasLEACH (Low-Energy Adaptive Clustering Hierarchy)BHAVESH G 19BCE0219Aún no hay calificaciones
- 7SK80xx Catalog SIP-2008 A3 enDocumento36 páginas7SK80xx Catalog SIP-2008 A3 enalainAún no hay calificaciones
- Double-impeller electric pumps technical data sheetDocumento9 páginasDouble-impeller electric pumps technical data sheetNahuel AlthausAún no hay calificaciones
- Computer Networks Lecture - 2-: Dr. Abbas A. AbdulazeezDocumento25 páginasComputer Networks Lecture - 2-: Dr. Abbas A. AbdulazeezDimitris TheodoropoulosAún no hay calificaciones
- Cartao Analogico PDFDocumento28 páginasCartao Analogico PDFFernandoCamargoAún no hay calificaciones