También podría gustarte
- UF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposDe EverandUF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposCalificación: 5 de 5 estrellas5/5 (1)
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalCalificación: 5 de 5 estrellas5/5 (4)
- UF2015 - Manejo de máquinas agrícolas de accionamiento y tracciónDe EverandUF2015 - Manejo de máquinas agrícolas de accionamiento y tracciónAún no hay calificaciones
- UF0009 - Mantenimiento, preparación y manejo de tractoresDe EverandUF0009 - Mantenimiento, preparación y manejo de tractoresAún no hay calificaciones
- La Creación de Los Océanos AzulesDocumento20 páginasLa Creación de Los Océanos AzuleserikaAún no hay calificaciones
- UF1252 - Elementos amovibles y fijos no estructuralesDe EverandUF1252 - Elementos amovibles y fijos no estructuralesAún no hay calificaciones
- Posicionado y control de la estructura en bancada. TMVL0309De EverandPosicionado y control de la estructura en bancada. TMVL0309Aún no hay calificaciones
- Mantenimiento, preparación y manejo de tractores. AGAH0108De EverandMantenimiento, preparación y manejo de tractores. AGAH0108Aún no hay calificaciones
- Robot cilíndrico: características, usos y especificacionesDocumento3 páginasRobot cilíndrico: características, usos y especificacionesJenny GutiérrezAún no hay calificaciones
- La Curaduria en Las Artes Visuales - Meta-Autoria y PosproduccionDocumento18 páginasLa Curaduria en Las Artes Visuales - Meta-Autoria y PosproduccionjonfeldAún no hay calificaciones
- Transmisiones y ReductoresDocumento8 páginasTransmisiones y Reductoresartiesk100% (1)
- 7) Servomotor PDFDocumento8 páginas7) Servomotor PDFdavid delgadoAún no hay calificaciones
- Modelo InstructivoDocumento8 páginasModelo Instructivopergarcia25Aún no hay calificaciones
- Distribución Normal EstándarDocumento29 páginasDistribución Normal Estándaralfredo lopezAún no hay calificaciones
- Calculo de CalefaccionDocumento22 páginasCalculo de CalefaccionMario Bisconti100% (1)
- K 300 PDFDocumento103 páginasK 300 PDFreof1922100% (2)
- Cinemática de Robots MóvilesDocumento67 páginasCinemática de Robots MóvilesRodrigo Cruces50% (2)
- Apuntes de Robótica UD1 Punto 5Documento13 páginasApuntes de Robótica UD1 Punto 5Francisco Alfonso Hernandez BravoAún no hay calificaciones
- Arquitectura Robots Sensores y ActuadoresDocumento27 páginasArquitectura Robots Sensores y Actuadoreswigido100% (1)
- Robots MóvilesDocumento30 páginasRobots MóvilesximenazeballosvAún no hay calificaciones
- Cinetica de RobotsDocumento6 páginasCinetica de RobotsCristian Salazar EspinozaAún no hay calificaciones
- Morfologia de Robots PDFDocumento51 páginasMorfologia de Robots PDFDiego LykaiosAún no hay calificaciones
- Clase 14 Diseño de Robot MovilDocumento17 páginasClase 14 Diseño de Robot MovilAlexis Villanueva MorenoAún no hay calificaciones
- 2 Morfologia y Cinemática Del RobotDocumento52 páginas2 Morfologia y Cinemática Del RobotPedro Angel Villada SanchezAún no hay calificaciones
- Unidad 1Documento31 páginasUnidad 1Juan ManuelAún no hay calificaciones
- Tema 2 MorfologiaDocumento58 páginasTema 2 Morfologiajuan caballeroAún no hay calificaciones
- UD9 Soldadura de RobotDocumento39 páginasUD9 Soldadura de RobotCristian Viqueira carnotaAún no hay calificaciones
- Informe de Robot MovilDocumento3 páginasInforme de Robot MovilaresteguiramosAún no hay calificaciones
- Modos de locomoción en robots: ruedas, cadenas y patasDocumento12 páginasModos de locomoción en robots: ruedas, cadenas y patasangelmarin7845Aún no hay calificaciones
- 3aa-Robotica Movil-2020Documento46 páginas3aa-Robotica Movil-2020Daerwěn SanchezAún no hay calificaciones
- Moton Ive LadoraDocumento26 páginasMoton Ive LadoraStik PrietoAún no hay calificaciones
- Ruedas para robots móvilesDocumento9 páginasRuedas para robots móvilesAbnerAún no hay calificaciones
- ExpoDocumento30 páginasExpostrummaticjonazAún no hay calificaciones
- Definición y Elementos BásicosDocumento11 páginasDefinición y Elementos BásicosAndy PolancoAún no hay calificaciones
- Apuntes de RoboticaDocumento40 páginasApuntes de RoboticaDavid A. D'LimaAún no hay calificaciones
- Transmision Del MovimientoDocumento12 páginasTransmision Del MovimientoIvette RamírezAún no hay calificaciones
- Servo MotorDocumento4 páginasServo MotorJason Mucha BarzolaAún no hay calificaciones
- Vehiculos Con RuedasDocumento4 páginasVehiculos Con RuedasAldemarBohórquezRodríguezAún no hay calificaciones
- Sistemas de DirecciónDocumento7 páginasSistemas de DirecciónBrandon RamirezAún no hay calificaciones
- Morfologia Del Robot Actuadores y SensoresDocumento25 páginasMorfologia Del Robot Actuadores y Sensoreslore002Aún no hay calificaciones
- Curso Sistemas Maquinaria Frenos Transmision Convertidores Caja Cambios Diferenciales Direccion Hidraulicos SuspensionDocumento117 páginasCurso Sistemas Maquinaria Frenos Transmision Convertidores Caja Cambios Diferenciales Direccion Hidraulicos SuspensionRICARDO MARTINEZ100% (1)
- R A 1 1-SuspensionDocumento26 páginasR A 1 1-SuspensionAlberto GilAún no hay calificaciones
- Tipos y Características de RobotsDocumento32 páginasTipos y Características de RobotsGray Kwon Fullbuster100% (1)
- Robots y sus clasificacionesDocumento143 páginasRobots y sus clasificacionesAlejandro VegaAún no hay calificaciones
- OBJETIVO22Documento12 páginasOBJETIVO22Leidy VelascoAún no hay calificaciones
- Motores Especiales: Polos sombreados, pasos, servos y linealesDocumento33 páginasMotores Especiales: Polos sombreados, pasos, servos y linealesTachi64Aún no hay calificaciones
- Clase 03Documento42 páginasClase 03Francisco Jiménez EscalonaAún no hay calificaciones
- Partes Del Torno CNCDocumento3 páginasPartes Del Torno CNCrafaelechuga81% (16)
- Sistemas tracción y dirección robots móvilesDocumento9 páginasSistemas tracción y dirección robots móvilesosielantonio10Aún no hay calificaciones
- Carro de Soldadura - 02020Documento3 páginasCarro de Soldadura - 02020Nataniel HuarachiiAún no hay calificaciones
- Tema 5 ServomotoresDocumento21 páginasTema 5 ServomotoresLin ParejasAún no hay calificaciones
- Presentación - AccionamientosDocumento17 páginasPresentación - AccionamientosNicofede RenAún no hay calificaciones
- Exposicion Leidy FinalDocumento16 páginasExposicion Leidy FinalLeidy VelascoAún no hay calificaciones
- Apuntes de RoboticaDocumento37 páginasApuntes de RoboticaMiguel AbrilAún no hay calificaciones
- Fundamentos de Robotica PDFDocumento40 páginasFundamentos de Robotica PDFedward trianaAún no hay calificaciones
- Tema 01b Morfología Del Robot ManipuladorDocumento21 páginasTema 01b Morfología Del Robot Manipuladordalton yañezAún no hay calificaciones
- Motor CC de Imán PermanenteDocumento22 páginasMotor CC de Imán Permanentecesarsong50% (6)
- Introducción A La RoboticaDocumento31 páginasIntroducción A La RoboticahaguilarAún no hay calificaciones
- Criterios de SeleccionDocumento16 páginasCriterios de SeleccionLeidy VelascoAún no hay calificaciones
- Servo MotoresDocumento5 páginasServo MotoresJonathan RomeroAún no hay calificaciones
- Resumen Libro Fundamentos de RoboticaDocumento41 páginasResumen Libro Fundamentos de RoboticaaaAún no hay calificaciones
- Control preciso posición eje con servomotorDocumento5 páginasControl preciso posición eje con servomotorHumberto José Reyes CevallosAún no hay calificaciones
- Elevador de AutosDocumento25 páginasElevador de Autosgabriel pacovilca arhuataAún no hay calificaciones
- Elementos Terminales - Cinematica - Dinamica - Wilmer YanchapantaDocumento30 páginasElementos Terminales - Cinematica - Dinamica - Wilmer YanchapantaWilmer YtAún no hay calificaciones
- Tópicos Avanzados de RobóticaDocumento34 páginasTópicos Avanzados de RobóticacarloselfresonAún no hay calificaciones
- Engranajes Cilíndricos de Dientes HelicoidalesDocumento15 páginasEngranajes Cilíndricos de Dientes HelicoidalesIvan Montenegro VargasAún no hay calificaciones
- TortoiseSVN 1.4.1 EsDocumento156 páginasTortoiseSVN 1.4.1 Eschinese12Aún no hay calificaciones
- Guia Unidad 2Documento3 páginasGuia Unidad 2jorgeant5Aún no hay calificaciones
- Bicameral Id AdDocumento2 páginasBicameral Id Adjorgeant5Aún no hay calificaciones
- Formula RioDocumento3 páginasFormula Riojorgeant5Aún no hay calificaciones
- Laera 1Documento22 páginasLaera 1jorgeant5Aún no hay calificaciones
- Actividad 1 Forma Función MateriaDocumento4 páginasActividad 1 Forma Función MateriaJuan Parraos50% (2)
- S13 - PPT - Ecuación de La RectaDocumento39 páginasS13 - PPT - Ecuación de La RectaJosue CordovaAún no hay calificaciones
- Concavidad y ConvexidadDocumento3 páginasConcavidad y ConvexidadealsolanoAún no hay calificaciones
- Trabajo Problemas Propuestos SemiconductoresDocumento10 páginasTrabajo Problemas Propuestos SemiconductoresDave ChecaAún no hay calificaciones
- Matemáticas UniversitariasDocumento168 páginasMatemáticas Universitariaslgrome73Aún no hay calificaciones
- Analisis Mat. III, Unidad IIIDocumento51 páginasAnalisis Mat. III, Unidad IIIBruno GuizzoAún no hay calificaciones
- Geometria y Su Didactica. GodinoDocumento164 páginasGeometria y Su Didactica. GodinoWillyam Camavilca100% (1)
- Calientamiento GlobalDocumento25 páginasCalientamiento GlobalEnmanuel BardalesAún no hay calificaciones
- Edades CronometriaDocumento10 páginasEdades CronometriapedroAún no hay calificaciones
- Algoritmo de La DivisiónDocumento42 páginasAlgoritmo de La DivisiónJesus C. Martinez100% (1)
- Geometríaanalítica RectasDocumento18 páginasGeometríaanalítica RectasstefanosAún no hay calificaciones
- Practica No. 3 DurometroDocumento6 páginasPractica No. 3 DurometroGris DotorAún no hay calificaciones
- Previo 7 Circuitos Eléctricos IDocumento7 páginasPrevio 7 Circuitos Eléctricos IFranz Lozano Torres100% (1)
- DelimitacionDocumento3 páginasDelimitacionvirgilioAún no hay calificaciones
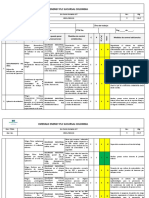
- Emerald Energy PLC Sucursal Colombia: JSA Form-Formato AST Rev. Pág Doc. No. HSEQ-F002-01Documento3 páginasEmerald Energy PLC Sucursal Colombia: JSA Form-Formato AST Rev. Pág Doc. No. HSEQ-F002-01SOLEDAD ESPERANZA ALFONSOAún no hay calificaciones
- Ingeniería II - Difusión Gases PDFDocumento27 páginasIngeniería II - Difusión Gases PDFivankennedyAún no hay calificaciones
- Practica de Física Ondas EstacionariasDocumento6 páginasPractica de Física Ondas EstacionariasSteve QuispeAún no hay calificaciones
- Espectrometría de Masas ExploradaDocumento48 páginasEspectrometría de Masas ExploradaFabbian ZAún no hay calificaciones
- Geografía escolar: explicar el mundo realDocumento13 páginasGeografía escolar: explicar el mundo realHoracio Miguel Hernán Zapata100% (1)
- Problemas de caída libre y movimiento verticalDocumento1 páginaProblemas de caída libre y movimiento verticalRossy Pablo PerezAún no hay calificaciones
- Presentación CfeDocumento33 páginasPresentación CfeEncuestas CalidadAún no hay calificaciones
- Clase 3Documento28 páginasClase 3kevin san martínAún no hay calificaciones
- M2 - AlgebraDocumento32 páginasM2 - AlgebraG LAún no hay calificaciones