También podría gustarte
- InTech-Batteries Charging Systems For Electric and Plug in Hybrid Electric VehiclesDocumento20 páginasInTech-Batteries Charging Systems For Electric and Plug in Hybrid Electric VehiclesM VetriselviAún no hay calificaciones
- Batteries Charging Systems For Electric and Plug-In Hybrid Electric VehiclesDocumento19 páginasBatteries Charging Systems For Electric and Plug-In Hybrid Electric VehiclesAmit RamvatAún no hay calificaciones
- Internet of Things Enabled Electric Vehicles in Smart CitiesDocumento8 páginasInternet of Things Enabled Electric Vehicles in Smart Citiespushpa lathaAún no hay calificaciones
- Experimental Validation of A Three-Port Integrated Topology To Interface Electric Vehicles and Renewables With The Electrical GridDocumento11 páginasExperimental Validation of A Three-Port Integrated Topology To Interface Electric Vehicles and Renewables With The Electrical GridDEVULAL BAún no hay calificaciones
- Vehicle-To-Grid Systems For Sustainable DevelopmenDocumento19 páginasVehicle-To-Grid Systems For Sustainable DevelopmenkarthicktamilmaniAún no hay calificaciones
- Vehicle To Grid TechnologyDocumento7 páginasVehicle To Grid TechnologyVIVA-TECH IJRIAún no hay calificaciones
- Smart Charging of Electric Vehicles With Photovoltaic Power and Vehicle-To-Grid Technology in A Microgrid A Case StudyDocumento11 páginasSmart Charging of Electric Vehicles With Photovoltaic Power and Vehicle-To-Grid Technology in A Microgrid A Case StudyEngEzequielAún no hay calificaciones
- Full Report On "VEHICLE TO GRID TECHNOLOGY (V2G) "Documento35 páginasFull Report On "VEHICLE TO GRID TECHNOLOGY (V2G) "Rahul Garg67% (3)
- A Review of Plug-In Electric Vehicles As Distributed Energy Storages in Smart GridDocumento6 páginasA Review of Plug-In Electric Vehicles As Distributed Energy Storages in Smart GridZunAib AliAún no hay calificaciones
- Electric Vehicle Thesis PDFDocumento4 páginasElectric Vehicle Thesis PDFWriteMyPaperForMeUK100% (4)
- Generation Expansion Planning Considering Renewable EnergiesDocumento11 páginasGeneration Expansion Planning Considering Renewable EnergiesAJER JOURNALAún no hay calificaciones
- PSP Lab ManualDocumento43 páginasPSP Lab ManualrahulAún no hay calificaciones
- Distribution Grid Impacts of Smart Electric Vehicle Charging From Different PerspectivesDocumento10 páginasDistribution Grid Impacts of Smart Electric Vehicle Charging From Different PerspectivesSumit RathorAún no hay calificaciones
- Grid-Connected EV Charging With Renewable Energy Integration in Parking LotsDocumento64 páginasGrid-Connected EV Charging With Renewable Energy Integration in Parking LotsGHANSHYAM MEENAAún no hay calificaciones
- 10 35378-Gujs 554206-1121835Documento19 páginas10 35378-Gujs 554206-1121835Nahil ShakerAún no hay calificaciones
- Electrical Power and Energy Systems: Rong-Ceng LeouDocumento6 páginasElectrical Power and Energy Systems: Rong-Ceng LeouMuhammad HamzaAún no hay calificaciones
- Energy Conversion and Management: Masoud Honarmand, Alireza Zakariazadeh, Shahram JadidDocumento11 páginasEnergy Conversion and Management: Masoud Honarmand, Alireza Zakariazadeh, Shahram JadidKiranAún no hay calificaciones
- Smart Deregulated Grid Frequency Control in Presence of Renewable Energy Resources by Evs Charging ControlDocumento13 páginasSmart Deregulated Grid Frequency Control in Presence of Renewable Energy Resources by Evs Charging Controlpavan gangwarAún no hay calificaciones
- Integrated Energy Scheduling and Routing For A Network of Mobile ProsumersDocumento12 páginasIntegrated Energy Scheduling and Routing For A Network of Mobile ProsumersAtiquzzaman ShomaAún no hay calificaciones
- The Concept of Ev S Intelligent Integrated Station and Its Energy FlowDocumento29 páginasThe Concept of Ev S Intelligent Integrated Station and Its Energy FlowHorváth PéterAún no hay calificaciones
- Multi-Agent System For Managing A Power Distribution System With Plug-In Hybrid Electrical Vehicles in Smart GridDocumento6 páginasMulti-Agent System For Managing A Power Distribution System With Plug-In Hybrid Electrical Vehicles in Smart GridsverdlowAún no hay calificaciones
- Topics-Optimal PEV ChargingDocumento2 páginasTopics-Optimal PEV ChargingilbahiAún no hay calificaciones
- Fuzzy Based Ev Charging With Reduced Power Fluctuation Under Renewable Power Consumption ConstraintDocumento16 páginasFuzzy Based Ev Charging With Reduced Power Fluctuation Under Renewable Power Consumption ConstraintkesavantAún no hay calificaciones
- Introduction To V2G TechnologyDocumento15 páginasIntroduction To V2G TechnologyMaranAún no hay calificaciones
- Chin ProjectDocumento64 páginasChin ProjectJagannath SrivatsaAún no hay calificaciones
- Energies: Electric Vehicle Charging Strategy For Isolated Systems With High Penetration of Renewable GenerationDocumento21 páginasEnergies: Electric Vehicle Charging Strategy For Isolated Systems With High Penetration of Renewable GenerationAlberto RiosAún no hay calificaciones
- PHD Research Proposal (Electrical Power & Energy Engineering) PDFDocumento13 páginasPHD Research Proposal (Electrical Power & Energy Engineering) PDFSaraMuzaffar33% (3)
- Un Enfoque Teórico Del Juego de Campo Medio para La Carga de Vehículos EléctricosDocumento10 páginasUn Enfoque Teórico Del Juego de Campo Medio para La Carga de Vehículos EléctricosJULIETTE XIMENA SANCHEZ HUERTASAún no hay calificaciones
- Photovoltaics (PV) and Electric Vehicle-To-grid (V2G) Strategies For Peak Demand Reduction in Urban Regions in Brazil in A Smart Grid EnvironmentDocumento9 páginasPhotovoltaics (PV) and Electric Vehicle-To-grid (V2G) Strategies For Peak Demand Reduction in Urban Regions in Brazil in A Smart Grid EnvironmentEngEzequielAún no hay calificaciones
- Energies: Vehicle Electrification: New Challenges and Opportunities For Smart GridsDocumento20 páginasEnergies: Vehicle Electrification: New Challenges and Opportunities For Smart GridsMahabub HaiderAún no hay calificaciones
- Charge Coordination and Battery Lifecycle Analysis of Electric Vehicles With V2G ImplementationDocumento11 páginasCharge Coordination and Battery Lifecycle Analysis of Electric Vehicles With V2G ImplementationneeliaAún no hay calificaciones
- An Optimal Charging/discharging Strategy For Smart Electrical Car ParksDocumento9 páginasAn Optimal Charging/discharging Strategy For Smart Electrical Car ParksAustin Okoth OmondiAún no hay calificaciones
- Renewable Energy: M.F. Shaaban, A.A. Eajal, E.F. El-SaadanyDocumento8 páginasRenewable Energy: M.F. Shaaban, A.A. Eajal, E.F. El-SaadanySumit RathorAún no hay calificaciones
- Wevj 09 00035Documento7 páginasWevj 09 00035sayantikaAún no hay calificaciones
- Thesis On Hybrid Energy SystemDocumento5 páginasThesis On Hybrid Energy Systemafknojbcf100% (2)
- Energy Storage Devices For Future Hybrid Electric VehiclesDocumento10 páginasEnergy Storage Devices For Future Hybrid Electric VehiclesNavaneeth KedlayaAún no hay calificaciones
- Impact of EVDocumento6 páginasImpact of EVBùi ViệtAún no hay calificaciones
- Dynamic Charging of Electric Vehicles IntegratingDocumento10 páginasDynamic Charging of Electric Vehicles IntegratingHanumant ChikuAún no hay calificaciones
- Comparison of Intelligent Charging Algorithms For EV To Reduce Peak Load and Demand VariabilityDocumento10 páginasComparison of Intelligent Charging Algorithms For EV To Reduce Peak Load and Demand VariabilityAdriana Q.Aún no hay calificaciones
- Comprehensive Review of Fast ChargingDocumento16 páginasComprehensive Review of Fast Chargingruhul aminAún no hay calificaciones
- Hybrid Power Systems ThesisDocumento8 páginasHybrid Power Systems ThesisCarmen Pell100% (1)
- 1 s2.0 S0959652622002281 MainDocumento22 páginas1 s2.0 S0959652622002281 MainsayantikaAún no hay calificaciones
- Alireza 2014Documento9 páginasAlireza 2014AmirKhanAún no hay calificaciones
- Energies: Reinforcement Learning Based Energy Management Algorithm For Smart Energy BuildingsDocumento19 páginasEnergies: Reinforcement Learning Based Energy Management Algorithm For Smart Energy BuildingsparisaAún no hay calificaciones
- Techno-Economic Analysis of Isolated and Grid Connected Hybrid SystemsDocumento50 páginasTechno-Economic Analysis of Isolated and Grid Connected Hybrid SystemsMukAún no hay calificaciones
- International Journal of Multidisciplinary Research and Growth EvaluationDocumento8 páginasInternational Journal of Multidisciplinary Research and Growth EvaluationJames UjamAún no hay calificaciones
- 2nd Control of Single-PhaseDocumento37 páginas2nd Control of Single-PhaseCaptain GamerAún no hay calificaciones
- Charging of Electric VehicleDocumento13 páginasCharging of Electric VehicleNahyanAún no hay calificaciones
- Ant Colony Optimzation of Microgrid Power ManagementDocumento7 páginasAnt Colony Optimzation of Microgrid Power ManagementKunalAroraAún no hay calificaciones
- Electrical Power and Energy Systems: Chia-Liang Lu, Chun-Lung Chen, Daw-Shang Hwang, Yuang-Tung ChengDocumento9 páginasElectrical Power and Energy Systems: Chia-Liang Lu, Chun-Lung Chen, Daw-Shang Hwang, Yuang-Tung Chengteju2812Aún no hay calificaciones
- Vehicle-To-Grid Power Fundamentals Calculating P PDFDocumento12 páginasVehicle-To-Grid Power Fundamentals Calculating P PDFgaganmeena1994Aún no hay calificaciones
- An Intelligent Load Management System With Renewable Energy Integration For Smart HomesDocumento14 páginasAn Intelligent Load Management System With Renewable Energy Integration For Smart HomesektAún no hay calificaciones
- TP (Muhammad Nurazli Bin Mohd Dali 2016690508)Documento8 páginasTP (Muhammad Nurazli Bin Mohd Dali 2016690508)azliAún no hay calificaciones
- Decision Making of A Virtual Power Plant Under Uncertainties For Bidding in A Day-Ahead Market Using Point Estimate Method (Highlighted)Documento11 páginasDecision Making of A Virtual Power Plant Under Uncertainties For Bidding in A Day-Ahead Market Using Point Estimate Method (Highlighted)KJAún no hay calificaciones
- Peak Shaving Through Battery Storage For Low-VoltaDocumento17 páginasPeak Shaving Through Battery Storage For Low-VoltartorrescoralAún no hay calificaciones
- Europe: Impact of Dispersed and Renewable Generation On Power System StructureDocumento38 páginasEurope: Impact of Dispersed and Renewable Generation On Power System StructuredanielraqueAún no hay calificaciones
- Energies 15 06037 v3Documento30 páginasEnergies 15 06037 v3BENI PURNOMOAún no hay calificaciones
- Innovation Landscape brief: Electric-vehicle smart chargingDe EverandInnovation Landscape brief: Electric-vehicle smart chargingAún no hay calificaciones
- Microsoft Excel-Based Tool Kit for Planning Hybrid Energy Systems: A User GuideDe EverandMicrosoft Excel-Based Tool Kit for Planning Hybrid Energy Systems: A User GuideAún no hay calificaciones
- DTC P1345 Crankshaft Position (CKP) - Camshaft Position (CMP) CorrelationDocumento5 páginasDTC P1345 Crankshaft Position (CKP) - Camshaft Position (CMP) CorrelationChino PlagaAún no hay calificaciones
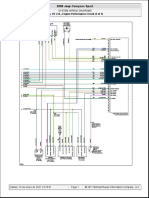
- Jeep Compass 2.4Documento1 páginaJeep Compass 2.4Chino Plaga100% (2)
- Jeep Compass 2.4Documento1 páginaJeep Compass 2.4Chino PlagaAún no hay calificaciones
- Camry 2.2L (5S-FE) TCC 1992-96 PDF Jag.Documento48 páginasCamry 2.2L (5S-FE) TCC 1992-96 PDF Jag.Chino PlagaAún no hay calificaciones
- Jeep Compass 2.4Documento1 páginaJeep Compass 2.4Chino Plaga100% (1)
- Engine Control (2UZ-FE) - 01-01Documento1 páginaEngine Control (2UZ-FE) - 01-01Chino PlagaAún no hay calificaciones
- Seat Leon (Data Lines) 2005-2011Documento4 páginasSeat Leon (Data Lines) 2005-2011Chino PlagaAún no hay calificaciones
- Manual de Servicio Isuzu 2.2lDocumento24 páginasManual de Servicio Isuzu 2.2lChino PlagaAún no hay calificaciones
- 2017 Hyundai Sonata L4-2.4L Engine Controls (Powertrain Management) - ALLDATA RepairDocumento6 páginas2017 Hyundai Sonata L4-2.4L Engine Controls (Powertrain Management) - ALLDATA RepairChino PlagaAún no hay calificaciones
- 2014 Nissan-Datsun Versa Sedan Engine Controls (Powertrain Management) - ALLDATA RepairDocumento5 páginas2014 Nissan-Datsun Versa Sedan Engine Controls (Powertrain Management) - ALLDATA RepairChino PlagaAún no hay calificaciones
- Cleaner Cars From Cradle To Grave Full ReportDocumento54 páginasCleaner Cars From Cradle To Grave Full ReportChino PlagaAún no hay calificaciones
- Photon Beam Characteristics & Basic Concepts of Treatment Planning - Dr. K J Maria Das PDFDocumento63 páginasPhoton Beam Characteristics & Basic Concepts of Treatment Planning - Dr. K J Maria Das PDFChino PlagaAún no hay calificaciones
- Renewable and Sustainable Energy Reviews: Francis Mwasilu, Jackson John Justo, Eun-Kyung Kim, Ton Duc Do, Jin-Woo JungDocumento16 páginasRenewable and Sustainable Energy Reviews: Francis Mwasilu, Jackson John Justo, Eun-Kyung Kim, Ton Duc Do, Jin-Woo JungChino PlagaAún no hay calificaciones
- 2013 Nissan Leaf DGDocumento44 páginas2013 Nissan Leaf DGChino PlagaAún no hay calificaciones
- Evb PDFDocumento259 páginasEvb PDFChino PlagaAún no hay calificaciones
- Suspension Bridge ReportDocumento36 páginasSuspension Bridge ReportRam Pathak50% (6)
- Mazda 3 BrochureDocumento16 páginasMazda 3 BrochurebacooAún no hay calificaciones
- Material Master - HAWA MaterialDocumento6 páginasMaterial Master - HAWA MaterialmeddebyounesAún no hay calificaciones
- Bitumen UnloadingDocumento13 páginasBitumen UnloadinghasriyaniAún no hay calificaciones
- Important Safety NoticeDocumento22 páginasImportant Safety NoticeDennis CanasAún no hay calificaciones
- Comparative Analysis of Transportation NDocumento12 páginasComparative Analysis of Transportation NdooeelhAún no hay calificaciones
- 2018 Hyundai Kona - Spec SheetDocumento4 páginas2018 Hyundai Kona - Spec Sheetsergio davidsAún no hay calificaciones
- U&M ARM550 E01Documento165 páginasU&M ARM550 E01Augusto Oliveira100% (2)
- English Lesson Day 46 To 50Documento5 páginasEnglish Lesson Day 46 To 50Elle MagieAún no hay calificaciones
- Ancient and Historic Metals 3/3Documento123 páginasAncient and Historic Metals 3/3argaricoAún no hay calificaciones
- Chapter 22Documento424 páginasChapter 22Station operation KBRAún no hay calificaciones
- !!!!!!!!ford Parts TTC Ford TransitDocumento100 páginas!!!!!!!!ford Parts TTC Ford Transitgmslibri100% (3)
- School Bus Pre-Trip Inspection ChecklistDocumento1 páginaSchool Bus Pre-Trip Inspection Checklistadmin embAún no hay calificaciones
- Flight Attendance Vocab. BookletDocumento6 páginasFlight Attendance Vocab. Bookletإيهاب غازيAún no hay calificaciones
- Group DiscussionDocumento2 páginasGroup Discussionaaashu77Aún no hay calificaciones
- Monthly LSA - Life Boat & Rescue BoatDocumento13 páginasMonthly LSA - Life Boat & Rescue BoatamditraAún no hay calificaciones
- Chapter 1 - Loading, Unloading, Carriage & Setting Out: Item No. Unit Rate (RS.) DescriptionDocumento38 páginasChapter 1 - Loading, Unloading, Carriage & Setting Out: Item No. Unit Rate (RS.) DescriptionAbhijeet SahuAún no hay calificaciones
- 1-2558 KlistDocumento836 páginas1-2558 Klistpinakin1Aún no hay calificaciones
- VisakhapatnamDocumento4 páginasVisakhapatnamSaptadityaAún no hay calificaciones
- Section 52 of The Motor Vehicles Act 1988: What Can Be Modified in A Vehicle?Documento3 páginasSection 52 of The Motor Vehicles Act 1988: What Can Be Modified in A Vehicle?Soumen DasAún no hay calificaciones
- Chemical and Mechanical DesignDocumento460 páginasChemical and Mechanical DesignNuriman K-monAún no hay calificaciones
- DEED of Transfer of MotorvehicleDocumento2 páginasDEED of Transfer of Motorvehicleaurea belen50% (4)
- eSUP 2015 02Documento2 páginaseSUP 2015 02Phyo ThantAún no hay calificaciones
- 3.1 DCC30103 - Chapter 3.1 Construction of Flexible PavementDocumento56 páginas3.1 DCC30103 - Chapter 3.1 Construction of Flexible PavementFATIN NABILA100% (1)
- Cruel Seas Quick Reference Sheet v1Documento3 páginasCruel Seas Quick Reference Sheet v1Francisco Javier100% (1)
- Physiology and Neurobiliogy 2275 UCONN Test 3Documento8 páginasPhysiology and Neurobiliogy 2275 UCONN Test 3sin117Aún no hay calificaciones
- Scroll Down To Read The ArticleDocumento23 páginasScroll Down To Read The ArticlerickAún no hay calificaciones
- Bridge Inspections: Dan WalshDocumento25 páginasBridge Inspections: Dan Walshdiarto trisnoyuwonoAún no hay calificaciones
- 2018 - PWC, Assessing of Tunnel Costs of Rail ProjectsDocumento375 páginas2018 - PWC, Assessing of Tunnel Costs of Rail ProjectslucaAún no hay calificaciones
- In The Neighborhood I: Upn, Pasión Por Transformar VidasDocumento24 páginasIn The Neighborhood I: Upn, Pasión Por Transformar VidasNirvana HornaAún no hay calificaciones