También podría gustarte
- Getting Started Heart Rate Training ReportDocumento4 páginasGetting Started Heart Rate Training ReportVikram BogarAún no hay calificaciones
- Composite MaterialsDocumento31 páginasComposite MaterialssaadAún no hay calificaciones
- Clarifications of Rule 2 in Teaching Geometric Dimensioning and Tolerancing Asme Quotes RFS FOSDocumento14 páginasClarifications of Rule 2 in Teaching Geometric Dimensioning and Tolerancing Asme Quotes RFS FOSAnuKrAún no hay calificaciones
- Design NH 021716Documento16 páginasDesign NH 021716Vikram BogarAún no hay calificaciones
- 09 BrynningsenDocumento17 páginas09 BrynningsenZahidur Rahman ZahidAún no hay calificaciones
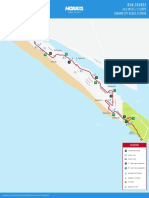
- Im Florida19 Coursemap Run 41219 CC Web 1 PDFDocumento2 páginasIm Florida19 Coursemap Run 41219 CC Web 1 PDFVikram BogarAún no hay calificaciones
- A Review On Pressure Vessel Design and A PDFDocumento3 páginasA Review On Pressure Vessel Design and A PDFVikram BogarAún no hay calificaciones
- Composite MaterialsDocumento31 páginasComposite MaterialssaadAún no hay calificaciones
- Mechanics Of Materials Solution Manual Beer 4thDocumento5 páginasMechanics Of Materials Solution Manual Beer 4thHatake IlhamAún no hay calificaciones
- Effects of Heat Treatment On The Properties of Mild SteelDocumento6 páginasEffects of Heat Treatment On The Properties of Mild SteelVikram BogarAún no hay calificaciones
- Numerical Analysis of The Steam Flow Field in Shell and Tube Heat ExchangerDocumento14 páginasNumerical Analysis of The Steam Flow Field in Shell and Tube Heat ExchangerVikram BogarAún no hay calificaciones
- CFD Analysis of Heat Exchanger and AftercoolerDocumento7 páginasCFD Analysis of Heat Exchanger and AftercoolerVikram BogarAún no hay calificaciones
- Heat Transfer Optimization of Shell-and-Tube PDFDocumento51 páginasHeat Transfer Optimization of Shell-and-Tube PDFVikram BogarAún no hay calificaciones
- CFD Analysis of Heat Exchanger and AftercoolerDocumento7 páginasCFD Analysis of Heat Exchanger and AftercoolerVikram BogarAún no hay calificaciones
- Design & Development of A Two-Jaw Parallel Pneumatic Gripper For Robotic ManipulationDocumento49 páginasDesign & Development of A Two-Jaw Parallel Pneumatic Gripper For Robotic ManipulationVikram BogarAún no hay calificaciones
- 2D Pick and Place RobotDocumento41 páginas2D Pick and Place RobotVikram BogarAún no hay calificaciones
- Analysis of Mechanical Error in Quick-Return Shaper MechanismDocumento5 páginasAnalysis of Mechanical Error in Quick-Return Shaper MechanismHaresh DesaiAún no hay calificaciones
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5782)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- SPC250SF Service m199Documento218 páginasSPC250SF Service m199bill3759Aún no hay calificaciones
- Application Programming and SQLDocumento1205 páginasApplication Programming and SQLbschuck1Aún no hay calificaciones
- Theoretical Normalized Site Attenuation Calculations by Spreadsheet AnalysisDocumento6 páginasTheoretical Normalized Site Attenuation Calculations by Spreadsheet AnalysisManny BarronAún no hay calificaciones
- How to login to LTMC and download the templateDocumento13 páginasHow to login to LTMC and download the templateArun KumaarAún no hay calificaciones
- L3 Programming ModeDocumento44 páginasL3 Programming ModeLawal Ahmed ShehuAún no hay calificaciones
- Excel Avancé 20216Documento116 páginasExcel Avancé 20216Moïse Salomon ThéaAún no hay calificaciones
- SQL Labsheet 2 - DML Part 1Documento1 páginaSQL Labsheet 2 - DML Part 1Hirdesh RamjutunAún no hay calificaciones
- Riska x8Documento5 páginasRiska x8Abdul MajidAún no hay calificaciones
- DSA Seatwork #1 Algorithms and ApplicationsDocumento11 páginasDSA Seatwork #1 Algorithms and ApplicationsEl Jean VillalobosAún no hay calificaciones
- Essential Spreadsheets Exercises PDFDocumento31 páginasEssential Spreadsheets Exercises PDFUlii PntAún no hay calificaciones
- Principle of Software TestingDocumento10 páginasPrinciple of Software TestingSuganya K. SelvakumarAún no hay calificaciones
- Mobile Application Development Question Bank AnalysisDocumento11 páginasMobile Application Development Question Bank AnalysisRajesh PadigelaAún no hay calificaciones
- Weintek Eb8000 - Manual Easybuilder Pro ManualDocumento698 páginasWeintek Eb8000 - Manual Easybuilder Pro Manualsplinter incAún no hay calificaciones
- Track Management System For Indian Railways: S.K.Malik, AMCE/RB Rajiv Dhankher, Dir (TMS)Documento41 páginasTrack Management System For Indian Railways: S.K.Malik, AMCE/RB Rajiv Dhankher, Dir (TMS)rajivdhankherAún no hay calificaciones
- Table: Worker Default Date Formate" Dd-Mon-RrDocumento4 páginasTable: Worker Default Date Formate" Dd-Mon-Rrpratik dholakiyaAún no hay calificaciones
- Tutorial 03 Latch FF State Machines 1Documento81 páginasTutorial 03 Latch FF State Machines 1Andreea ChiriluşAún no hay calificaciones
- DSA Project ReportDocumento22 páginasDSA Project ReportRitesh KumarAún no hay calificaciones
- FDocumento18 páginasFAdrian SerkisAún no hay calificaciones
- A Survey On Compression Algorithms in HadoopDocumento4 páginasA Survey On Compression Algorithms in HadoopEditor IJRITCCAún no hay calificaciones
- Senior QA Engineer TaskDocumento2 páginasSenior QA Engineer TaskcareerboostzfAún no hay calificaciones
- Cours 1 - Intro To Deep LearningDocumento38 páginasCours 1 - Intro To Deep LearningSarah BouammarAún no hay calificaciones
- Ges3 Reader: User ManualDocumento44 páginasGes3 Reader: User ManualSergiu PopescuAún no hay calificaciones
- RTOS For PIC18 MicrocontrollersDocumento6 páginasRTOS For PIC18 MicrocontrollersLeo EscobarAún no hay calificaciones
- Microsoft Powerpoint InterfaceDocumento10 páginasMicrosoft Powerpoint InterfaceLaong laanAún no hay calificaciones
- 12 CSE Syllabus 2012 13Documento57 páginas12 CSE Syllabus 2012 13rickyali_rocksAún no hay calificaciones
- 3BUS095139 en Petrobras REPAR Success StoryDocumento2 páginas3BUS095139 en Petrobras REPAR Success StoryAmet koko TaroAún no hay calificaciones
- Retrofit Control Panel UpgradeDocumento2 páginasRetrofit Control Panel UpgradeGerman O.Aún no hay calificaciones
- Ansys 15Documento3 páginasAnsys 15Ramesh BammankattiAún no hay calificaciones
- PRE-TEST Empowerment TechnologyDocumento40 páginasPRE-TEST Empowerment TechnologyMat3x100% (1)