También podría gustarte
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2100)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Oracle Database Cloud Cookbook With Oracle Enterprise Manager 13c Cloud ControlDocumento559 páginasOracle Database Cloud Cookbook With Oracle Enterprise Manager 13c Cloud ControlSavo100% (4)
- (United States of America) : CS Historical Paper No. 208Documento86 páginas(United States of America) : CS Historical Paper No. 208bizAún no hay calificaciones
- Simio Reference GuideDocumento521 páginasSimio Reference GuideVishal Tamraparni100% (1)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- FDL-3 BOM Auto TailDocumento2 páginasFDL-3 BOM Auto TailRafael ReisAún no hay calificaciones
- LectureDocumento36 páginasLecturebizAún no hay calificaciones
- The Lagrangian Relaxation Method For Solving Integer Programming ProblemsDocumento12 páginasThe Lagrangian Relaxation Method For Solving Integer Programming ProblemsbizAún no hay calificaciones
- Resource Constrained Assignment ProblemsDocumento17 páginasResource Constrained Assignment ProblemsbizAún no hay calificaciones
- Variable Neighborhood Search For Bin Packing ProblemDocumento21 páginasVariable Neighborhood Search For Bin Packing ProblembizAún no hay calificaciones
- Using Mathematical Programming and Simulation To Study FMS Machine UtilizationsDocumento6 páginasUsing Mathematical Programming and Simulation To Study FMS Machine UtilizationsbizAún no hay calificaciones
- Lagrangian Based Approach To Solve A Two Level Capacitated Lot Sizing ProblemDocumento13 páginasLagrangian Based Approach To Solve A Two Level Capacitated Lot Sizing ProblembizAún no hay calificaciones
- Multicriteria SchedulingDocumento3 páginasMulticriteria SchedulingbizAún no hay calificaciones
- Presentation 12 (Location I)Documento30 páginasPresentation 12 (Location I)bizAún no hay calificaciones
- Using Genetic Algorithms For Single-Machine Bicriteria Scheduling ProblemsDocumento14 páginasUsing Genetic Algorithms For Single-Machine Bicriteria Scheduling ProblemsbizAún no hay calificaciones
- Multiple and Bicriteria Scheduling - A Literature SurveyDocumento17 páginasMultiple and Bicriteria Scheduling - A Literature SurveybizAún no hay calificaciones
- New Solution Methods For Single Machine Bicriteria Scheduling Problem - Minimization of Average Flowtime and Number of Tardy JobsDocumento10 páginasNew Solution Methods For Single Machine Bicriteria Scheduling Problem - Minimization of Average Flowtime and Number of Tardy JobsbizAún no hay calificaciones
- Ingle Machine Scheduling To Minimize Total Weighted Earliness Subject To Minimal Number of Tardy JobsDocumento9 páginasIngle Machine Scheduling To Minimize Total Weighted Earliness Subject To Minimal Number of Tardy JobsbizAún no hay calificaciones
- Bicriterion Stochastic Scheduling On One or More MachinesDocumento6 páginasBicriterion Stochastic Scheduling On One or More MachinesbizAún no hay calificaciones
- Bi-Criteria Scheduling Problems - Number of Tardy Jobs and Maximum Weighted TardinessDocumento19 páginasBi-Criteria Scheduling Problems - Number of Tardy Jobs and Maximum Weighted TardinessbizAún no hay calificaciones
- Chap 01 SlidesDocumento51 páginasChap 01 SlidessharmilaAún no hay calificaciones
- A Survey of The State-Of-The-Art of Common Due Date Assignment and Scheduling ResearchDocumento25 páginasA Survey of The State-Of-The-Art of Common Due Date Assignment and Scheduling ResearchbizAún no hay calificaciones
- Computer SimulationDocumento36 páginasComputer SimulationkimAún no hay calificaciones
- Bi-Criteria Scheduling On Parallel Machines Under Fuzzy Processing TimeDocumento7 páginasBi-Criteria Scheduling On Parallel Machines Under Fuzzy Processing TimebizAún no hay calificaciones
- Ga For Bin Packing and Line BalancingDocumento7 páginasGa For Bin Packing and Line BalancingbizAún no hay calificaciones
- Queeing Theorem - ExampleDocumento5 páginasQueeing Theorem - ExamplebizAún no hay calificaciones
- Queueing ToolsDocumento6 páginasQueueing ToolspillushnAún no hay calificaciones
- Discrete Event Simulation ModelingDocumento116 páginasDiscrete Event Simulation ModelingSamrat MukhopadhyayAún no hay calificaciones
- Introduction To SimioDocumento99 páginasIntroduction To SimiobizAún no hay calificaciones
- Common Source Amplifier PDFDocumento2 páginasCommon Source Amplifier PDFJennifer0% (1)
- 6762792 (1)Documento2 páginas6762792 (1)BenjaAún no hay calificaciones
- 3256 Test Result FCCID - Io-2351772Documento24 páginas3256 Test Result FCCID - Io-2351772Sami DohaAún no hay calificaciones
- DS-7600NI-I2/P Series NVR: Key FeatureDocumento5 páginasDS-7600NI-I2/P Series NVR: Key FeatureFabian BonillaAún no hay calificaciones
- Special Documentation Proline Promass 500 FOUNDATION FieldbusDocumento52 páginasSpecial Documentation Proline Promass 500 FOUNDATION Fieldbuspaula marambioAún no hay calificaciones
- Mis S2Documento25 páginasMis S2Abin AntonyAún no hay calificaciones
- 1000+ Education, Police & Anti Corruption Jobs Through SPSCDocumento12 páginas1000+ Education, Police & Anti Corruption Jobs Through SPSCZahid AliAún no hay calificaciones
- KePol Prospekt E Doppelseiten Self Service LockersDocumento9 páginasKePol Prospekt E Doppelseiten Self Service LockersAJAún no hay calificaciones
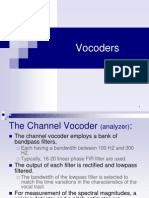
- ch5.3 (Vocoders)Documento23 páginasch5.3 (Vocoders)Abhiram YanamandraAún no hay calificaciones
- Acer Veriton S661 QSDocumento3 páginasAcer Veriton S661 QSAspurlah Mohamed Jidi IAún no hay calificaciones
- Confirm Napolcom SlipDocumento2 páginasConfirm Napolcom SlipMarkjason castilloAún no hay calificaciones
- Introduction To VLSI Design EEE 416: Dr. Mohammad Al HakimDocumento23 páginasIntroduction To VLSI Design EEE 416: Dr. Mohammad Al HakimMizanur Rahman SujanAún no hay calificaciones
- Block 1Documento57 páginasBlock 1riya guptaAún no hay calificaciones
- 100r Pin120 Id Tec KoreaDocumento2 páginas100r Pin120 Id Tec KoreaSohail HanifAún no hay calificaciones
- ShipDocumento5 páginasShipTryj1Aún no hay calificaciones
- LG 42LK450 (SM) PDFDocumento72 páginasLG 42LK450 (SM) PDFSandroCezardeAraujoAún no hay calificaciones
- Manual EncoderDocumento4 páginasManual EncoderDoc_LACAún no hay calificaciones
- Vocabulary Learning About Operating SystemsDocumento2 páginasVocabulary Learning About Operating SystemsErnst DgAún no hay calificaciones
- 1 2 3 4 5 6 7 PM583 Di524 8 9 Ta521 Di524 PM583 Ta521 CM597 Ci522Documento1 página1 2 3 4 5 6 7 PM583 Di524 8 9 Ta521 Di524 PM583 Ta521 CM597 Ci522mahmoud sheblAún no hay calificaciones
- A6V10444410 - Multi-Sensor Fire Detector - enDocumento8 páginasA6V10444410 - Multi-Sensor Fire Detector - enRoman DebkovAún no hay calificaciones
- The University of Birmingham Data Protection Policy A.: Appendix 1Documento17 páginasThe University of Birmingham Data Protection Policy A.: Appendix 1Muhammad Akbar WalennaAún no hay calificaciones
- Three Matlab Implementations of The Lowest-Order Raviart-Thomas Mfem With A Posteriori Error ControlDocumento29 páginasThree Matlab Implementations of The Lowest-Order Raviart-Thomas Mfem With A Posteriori Error ControlPankaj SahlotAún no hay calificaciones
- DHE Series Servo: Simple Operation ManualDocumento31 páginasDHE Series Servo: Simple Operation ManualSharif 0870% (1)
- Arturo B. Del Ayre's Curriculum Vitae & ResumeDocumento14 páginasArturo B. Del Ayre's Curriculum Vitae & ResumeArturo Brondial del Ayre100% (6)
- Tutorial - Making Spur Gear in AutoCAD - GrabCADDocumento10 páginasTutorial - Making Spur Gear in AutoCAD - GrabCADAnkushAún no hay calificaciones
- Lifting Points Brochure E1Documento108 páginasLifting Points Brochure E1tintucinbAún no hay calificaciones
- VHDL Code For Updown CNTDocumento3 páginasVHDL Code For Updown CNTmeaow88100% (2)
- Epson FX 890 DatasheetDocumento2 páginasEpson FX 890 DatasheetMarcos ZamorioAún no hay calificaciones