También podría gustarte
- Eqilibrium Approximation Quality of Current No-Limit Poker BotsDocumento6 páginasEqilibrium Approximation Quality of Current No-Limit Poker BotsМария СавенкоAún no hay calificaciones
- Towards Optimizing Entertainment in Computer GamesDocumento40 páginasTowards Optimizing Entertainment in Computer Gamesbakular.mark675Aún no hay calificaciones
- Presentation AshikDocumento16 páginasPresentation Ashikআশিকুজ্জামানআশিকAún no hay calificaciones
- Thurau2004Learning Human-Like Movement BehaviorDocumento9 páginasThurau2004Learning Human-Like Movement BehaviorCristiano TonéisAún no hay calificaciones
- Temporal and Spatial Combinatorics in Ga PDFDocumento12 páginasTemporal and Spatial Combinatorics in Ga PDFMeldrick DizonAún no hay calificaciones
- NIPS 2009 Monte Carlo Sampling For Regret Minimization in Extensive Games PaperDocumento9 páginasNIPS 2009 Monte Carlo Sampling For Regret Minimization in Extensive Games Paperkarolina rycerzAún no hay calificaciones
- Exag 116Documento4 páginasExag 116zcdkhnz9tmAún no hay calificaciones
- Bentley 2019 AffordancesDocumento5 páginasBentley 2019 Affordancesdiegohk20688Aún no hay calificaciones
- HCI Final PaperDocumento7 páginasHCI Final PaperAhsan JavedAún no hay calificaciones
- White Paper Force FeedbackDocumento6 páginasWhite Paper Force FeedbackgregAún no hay calificaciones
- Evaluating The Effectiveness of Huds and Diegetic Ammo Displays in First-Person Shooter GamesDocumento8 páginasEvaluating The Effectiveness of Huds and Diegetic Ammo Displays in First-Person Shooter GamesJimit DoshiAún no hay calificaciones
- Jesper JuulPhDdissertationabstractfinal PDFDocumento2 páginasJesper JuulPhDdissertationabstractfinal PDFGiovanni RochaAún no hay calificaciones
- MatchmakingDocumento9 páginasMatchmakingbbnjh7zjxgAún no hay calificaciones
- TOPIC NAME FaisalDocumento12 páginasTOPIC NAME Faisalamankumar1409201Aún no hay calificaciones
- Modelling Dead Rocking in Online Multi-Player Games: MD Sirajul Huque, C Surekha, A Kishore Kumar, Sri LathaDocumento5 páginasModelling Dead Rocking in Online Multi-Player Games: MD Sirajul Huque, C Surekha, A Kishore Kumar, Sri LathaRadhe KrishnAún no hay calificaciones
- Balancing Zero-Sum Games With One Variable Per Strategy: Albert Julius Liu and Steve MarschnerDocumento9 páginasBalancing Zero-Sum Games With One Variable Per Strategy: Albert Julius Liu and Steve MarschnerGuestAún no hay calificaciones
- An Educational Iphone Game:Fishing Adventure Using Iphone SDK and Cocos2D LibraryDocumento6 páginasAn Educational Iphone Game:Fishing Adventure Using Iphone SDK and Cocos2D LibraryRamkrishna PattnayakAún no hay calificaciones
- Investigating H Uman P Riors For P Laying V Ideo G AmesDocumento11 páginasInvestigating H Uman P Riors For P Laying V Ideo G AmesNaveenKumarAún no hay calificaciones
- Convention Paper 9802: Audio Engineering SocietyDocumento12 páginasConvention Paper 9802: Audio Engineering SocietyRodrigo SobradoAún no hay calificaciones
- A Corpus Analysis of Strategy Video Game Play in Starcraft: Brood WarDocumento6 páginasA Corpus Analysis of Strategy Video Game Play in Starcraft: Brood WarPatrick TrinhAún no hay calificaciones
- Hexmage - Encounter Balancing in Hex Arena: Jakub ArnoldDocumento45 páginasHexmage - Encounter Balancing in Hex Arena: Jakub ArnolddarthdeusAún no hay calificaciones
- MReportDocumento125 páginasMReportHrec TaccAún no hay calificaciones
- The Impact of Video Game InteractivityDocumento87 páginasThe Impact of Video Game Interactivitycon.liviu2030Aún no hay calificaciones
- Connecting The Real World and Virtual World Through Gaming: Mixed Reality Lab, National University of SingaporeDocumento6 páginasConnecting The Real World and Virtual World Through Gaming: Mixed Reality Lab, National University of SingaporeKate Iannel VicenteAún no hay calificaciones
- Shaker2012Digging PDFDocumento10 páginasShaker2012Digging PDFmahmoudAún no hay calificaciones
- Machines For Play Functionality ContextDocumento71 páginasMachines For Play Functionality ContextAinhoa AtorrasagastiAún no hay calificaciones
- Ranjitha 2020 J. Phys. Conf. Ser. 1427 012006Documento12 páginasRanjitha 2020 J. Phys. Conf. Ser. 1427 012006Nithya SukumarAún no hay calificaciones
- Rock Paper Scissor - Smile (6319025)Documento38 páginasRock Paper Scissor - Smile (6319025)Dimple VermaAún no hay calificaciones
- Thinking With Portals: A Rhetorical Analysis of PortalDocumento20 páginasThinking With Portals: A Rhetorical Analysis of PortalJason Todd DafnisAún no hay calificaciones
- Game Net Lesson 1.1Documento38 páginasGame Net Lesson 1.1suravillajohnreyAún no hay calificaciones
- Mibs Project DocumentationDocumento20 páginasMibs Project DocumentationPrachi GoreAún no hay calificaciones
- Reinforcement Learning With PokerDocumento10 páginasReinforcement Learning With PokerSolayappan MeenakshiAún no hay calificaciones
- Natural User Interface (NUI) : A Case Study of A Video Based Interaction Technique For A Computer GameDocumento5 páginasNatural User Interface (NUI) : A Case Study of A Video Based Interaction Technique For A Computer GameKazuu HaAún no hay calificaciones
- Flash Games ThesisDocumento5 páginasFlash Games Thesisgjfs5mtv100% (2)
- Lou12 AddictivenessDocumento6 páginasLou12 AddictivenessAnang SunnyAún no hay calificaciones
- Abstract Serious GameDocumento3 páginasAbstract Serious GameSilvestreAún no hay calificaciones
- 5 1 RepeatedGamesIntro 1 0Documento19 páginas5 1 RepeatedGamesIntro 1 0007wasrAún no hay calificaciones
- The State of Machine Learning and Artificial IntelligenceDocumento9 páginasThe State of Machine Learning and Artificial IntelligenceBiomodellingAún no hay calificaciones
- Thue Etal 2007Documento6 páginasThue Etal 2007Chris InNottsAún no hay calificaciones
- A Cryptographic Solution To A Game Theoretic Problem: Yevgeniy Dodis Shai Halevi Tal RabinDocumento19 páginasA Cryptographic Solution To A Game Theoretic Problem: Yevgeniy Dodis Shai Halevi Tal RabinramakrishnanpsgAún no hay calificaciones
- 2007 Djaouti Et Al - A Gameplay Definition Through Videogame ClassifictionDocumento7 páginas2007 Djaouti Et Al - A Gameplay Definition Through Videogame Classifictionsara eAún no hay calificaciones
- FPS Chapter 1 2 and 3Documento35 páginasFPS Chapter 1 2 and 3James DaumarAún no hay calificaciones
- Context-Aware 3D Object Streaming For Mobile Games: Hesam Rahimi, Ali Asghar Nazari Shirehjini, Shervin ShirmohammadiDocumento3 páginasContext-Aware 3D Object Streaming For Mobile Games: Hesam Rahimi, Ali Asghar Nazari Shirehjini, Shervin Shirmohammadidodo abdurrahmanAún no hay calificaciones
- Catch The Elements DocumentationDocumento57 páginasCatch The Elements DocumentationCarlo MallariAún no hay calificaciones
- Mixed Reality PDFDocumento8 páginasMixed Reality PDFatom tuxAún no hay calificaciones
- Space Shooter GameDocumento18 páginasSpace Shooter GameSowmya Srinivasan100% (2)
- CHI PLAY Michal S SubmissionDocumento23 páginasCHI PLAY Michal S SubmissionMichał MichalczewskiAún no hay calificaciones
- Video Games Localisation Posing New Challenges To The TranslatorDocumento19 páginasVideo Games Localisation Posing New Challenges To The Translatoralba_97Aún no hay calificaciones
- (PE) (Lewins) Physical Systems in Computer GamesDocumento4 páginas(PE) (Lewins) Physical Systems in Computer Gamesjcb1961Aún no hay calificaciones
- Project Proposal: 1 Motivation and ObjectivesDocumento5 páginasProject Proposal: 1 Motivation and ObjectivesashiqazamkhanAún no hay calificaciones
- Sigdoc3 RoccettiDocumento6 páginasSigdoc3 RoccettiGustavo MarfiaAún no hay calificaciones
- AL3391 AI UNIT 3 NOTES EduEnggDocumento38 páginasAL3391 AI UNIT 3 NOTES EduEnggKarthik king KAún no hay calificaciones
- 10BM60028 - Cloud Based GamingDocumento13 páginas10BM60028 - Cloud Based GamingGautam GogoiAún no hay calificaciones
- VideogamesAI FMDocumento6 páginasVideogamesAI FMFajar RamdhaniAún no hay calificaciones
- Procedural AudioDocumento12 páginasProcedural AudioMattiaSerrentinoAún no hay calificaciones
- Counter-Strike Deathmatch With Large-Scale Behavioural CloningDocumento24 páginasCounter-Strike Deathmatch With Large-Scale Behavioural CloningМихаил ПетровAún no hay calificaciones
- Game Design For Wireless DevicesDocumento7 páginasGame Design For Wireless DevicesFernando BordignonAún no hay calificaciones
- Switchboard: A Matchmaking System For Multiplayer Mobile Games - MobiSys 2011Documento14 páginasSwitchboard: A Matchmaking System For Multiplayer Mobile Games - MobiSys 2011Deepak Gupta (DG)Aún no hay calificaciones
- Advanced Dynamics SyllabusDocumento4 páginasAdvanced Dynamics SyllabusAndrea SpencerAún no hay calificaciones
- Control SyllabusDocumento5 páginasControl SyllabusAndrea SpencerAún no hay calificaciones
- Capstone Design Course-Syllab-MEEN-404-with-W-Fall-2018Documento3 páginasCapstone Design Course-Syllab-MEEN-404-with-W-Fall-2018Andrea SpencerAún no hay calificaciones
- MEEN364 Syllabus Sp15Documento6 páginasMEEN364 Syllabus Sp15Anonymous yWZp7HsAún no hay calificaciones
- Schwinn MPower Echelon2 Frequently Asked QuestionsDocumento5 páginasSchwinn MPower Echelon2 Frequently Asked QuestionsAndrea SpencerAún no hay calificaciones
- MEEN655 Syllabus Sp16 PDFDocumento5 páginasMEEN655 Syllabus Sp16 PDFAndrea SpencerAún no hay calificaciones
- Numerical Analysis 2020 - Fall - MEEN357 - SyllabusDocumento9 páginasNumerical Analysis 2020 - Fall - MEEN357 - SyllabusAndrea SpencerAún no hay calificaciones
- Dynamics and Biomechatronics Lab: EducationDocumento1 páginaDynamics and Biomechatronics Lab: EducationAndrea SpencerAún no hay calificaciones
- BallDocumento5 páginasBallAndrea SpencerAún no hay calificaciones
- Sparse MatrixDocumento6 páginasSparse MatrixAndrea SpencerAún no hay calificaciones
- MEEN 357 Engineering Analysis For Mechanical EngineeringDocumento10 páginasMEEN 357 Engineering Analysis For Mechanical EngineeringAndrea SpencerAún no hay calificaciones
- Robotics, ROS, Nonlinear Control, Lagrange Dynamics, KinematicsDocumento3 páginasRobotics, ROS, Nonlinear Control, Lagrange Dynamics, KinematicsAndrea SpencerAún no hay calificaciones
- Numerical Opticon ControlDocumento122 páginasNumerical Opticon ControlAndrea SpencerAún no hay calificaciones
- Example DK IterationDocumento2 páginasExample DK IterationAndrea SpencerAún no hay calificaciones
- Markov ChainDocumento28 páginasMarkov ChainAndrea SpencerAún no hay calificaciones
- Duality (Optimization)Documento6 páginasDuality (Optimization)Andrea SpencerAún no hay calificaciones
- ROS Cheat SheetDocumento2 páginasROS Cheat SheetAndrea SpencerAún no hay calificaciones
- Lifted Newton OptimizationDocumento60 páginasLifted Newton OptimizationAndrea SpencerAún no hay calificaciones
- Acado OptimizationDocumento33 páginasAcado OptimizationAndrea SpencerAún no hay calificaciones
- Getting Started - DropboxDocumento6 páginasGetting Started - DropboxAnonymous Aeh0aDhF2Aún no hay calificaciones
- HDMI Cable Upgrage InstructionDocumento1 páginaHDMI Cable Upgrage InstructionAndrea SpencerAún no hay calificaciones
- Lagrange Multipliers On Banach SpacesDocumento2 páginasLagrange Multipliers On Banach SpacesAndrea SpencerAún no hay calificaciones
- Karush-Kuhn-Tucker ConditionsDocumento5 páginasKarush-Kuhn-Tucker ConditionsAndrea SpencerAún no hay calificaciones
- (MAN-025!1!0) Trigno SDK User GuideDocumento21 páginas(MAN-025!1!0) Trigno SDK User GuideAndrea SpencerAún no hay calificaciones
- Syllabus RoboticsDocumento3 páginasSyllabus RoboticsAndrea SpencerAún no hay calificaciones
- HH 2016 Annual Report WEBDocumento4 páginasHH 2016 Annual Report WEBAndrea SpencerAún no hay calificaciones
- Kac Robotic ArtDocumento9 páginasKac Robotic ArtAndrea SpencerAún no hay calificaciones
- ASB 2016 Schedule Sessions WebDocumento8 páginasASB 2016 Schedule Sessions WebAndrea SpencerAún no hay calificaciones
- P2 Virtual RehabDocumento15 páginasP2 Virtual RehabAndrea SpencerAún no hay calificaciones
- Nested ANOVA, Statistics, InferenceDocumento9 páginasNested ANOVA, Statistics, InferenceAndrea SpencerAún no hay calificaciones
- Lecture Notes (Chapter 3.4 Motion in Plane Curve)Documento2 páginasLecture Notes (Chapter 3.4 Motion in Plane Curve)shinee_jayasila2080Aún no hay calificaciones
- Newton's Laws & Weight 1 QPDocumento11 páginasNewton's Laws & Weight 1 QPRabia RafiqueAún no hay calificaciones
- TIMSS Past Paper QuestionsDocumento33 páginasTIMSS Past Paper QuestionsRohaan AhmedAún no hay calificaciones
- Physics 0625-41 O Levels 2023 AP 1Documento14 páginasPhysics 0625-41 O Levels 2023 AP 1Zahra RaufAún no hay calificaciones
- Homi Bhabha Exam - Answer Key - 19th December 2021Documento25 páginasHomi Bhabha Exam - Answer Key - 19th December 2021AtushAún no hay calificaciones
- 03 NCERT PHYSICS POINTS TO PONDER Class-XIDocumento10 páginas03 NCERT PHYSICS POINTS TO PONDER Class-XIvipin79% (14)
- Physics Midterm Review PacketDocumento6 páginasPhysics Midterm Review PacketJasper SendraAún no hay calificaciones
- Milan Interlaken MapDocumento11 páginasMilan Interlaken MapkaushAún no hay calificaciones
- Cambridge International AS & A Level: Physics 9702/23 May/June 2020Documento14 páginasCambridge International AS & A Level: Physics 9702/23 May/June 2020junk filesAún no hay calificaciones
- 03 Cart On A Ramp LQDocumento2 páginas03 Cart On A Ramp LQChris BernhardtAún no hay calificaciones
- A Serving of Potato Chips Contains 2400 MG of SodiumDocumento4 páginasA Serving of Potato Chips Contains 2400 MG of SodiumSumaiya AzharAún no hay calificaciones
- Physics Chapter 7 AnswersDocumento26 páginasPhysics Chapter 7 AnswersAbovethesystem100% (8)
- Application & Installation Guide Vibration: LEBW4972-03Documento28 páginasApplication & Installation Guide Vibration: LEBW4972-03dimaomarAún no hay calificaciones
- Chap 3 No 1Documento2 páginasChap 3 No 1api-338922585Aún no hay calificaciones
- Curvilinear Motion: Cylindrical Components: Today's Objectives: In-Class ActivitiesDocumento17 páginasCurvilinear Motion: Cylindrical Components: Today's Objectives: In-Class ActivitiesAtef Naz100% (1)
- 1.2 TBMDocumento28 páginas1.2 TBMibnrafeeqAún no hay calificaciones
- How Mass Bends SpaceDocumento27 páginasHow Mass Bends SpacefindlayhaenggiAún no hay calificaciones
- 4U1 - PP4 (Relative Motion)Documento6 páginas4U1 - PP4 (Relative Motion)SA - 12CJ 684600 Central Peel SSAún no hay calificaciones
- STD Xii Model Question Papers Solutions PDFDocumento259 páginasSTD Xii Model Question Papers Solutions PDFSara KhanAún no hay calificaciones
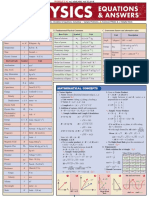
- Quick Study - Physics Equations & AnswersDocumento6 páginasQuick Study - Physics Equations & AnswersjavierfajardoAún no hay calificaciones
- Exner EquationDocumento8 páginasExner Equationlomas3Aún no hay calificaciones
- Module 1: Introduction To Dynamics of Rigid Bodies: Learning ObjectivesDocumento8 páginasModule 1: Introduction To Dynamics of Rigid Bodies: Learning Objectivesderping lemonAún no hay calificaciones
- Math SlideDocumento13 páginasMath SlideRose YacobAún no hay calificaciones
- 1st Law of MotionDocumento14 páginas1st Law of Motionbasaallen566Aún no hay calificaciones
- Main Paper-1Documento15 páginasMain Paper-1Animehs100% (1)
- Forces Motion BasicsDocumento3 páginasForces Motion BasicsMadeline SibuloAún no hay calificaciones
- Crust 2017Documento41 páginasCrust 2017HELMA B. JABELLOAún no hay calificaciones
- Science 7 Q3Documento129 páginasScience 7 Q3Jonnah Faye Mojares100% (2)
- Lecture 1.3 - Week 2 Wednesday - Kinematics and KineticsDocumento58 páginasLecture 1.3 - Week 2 Wednesday - Kinematics and KineticsAmala CuganesanAún no hay calificaciones
- Analytical Synthesis and Analysis of Mechanisms Using Matlab and SimulinkDocumento15 páginasAnalytical Synthesis and Analysis of Mechanisms Using Matlab and SimulinkFrancisco Jaime SilvaAún no hay calificaciones
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesDe EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesCalificación: 5 de 5 estrellas5/5 (1)
- Electronics All-in-One For Dummies, 3rd EditionDe EverandElectronics All-in-One For Dummies, 3rd EditionCalificación: 5 de 5 estrellas5/5 (2)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosDe EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosCalificación: 5 de 5 estrellas5/5 (1)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsDe EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialDe EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialCalificación: 3.5 de 5 estrellas3.5/5 (3)
- Analog Design and Simulation Using OrCAD Capture and PSpiceDe EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceAún no hay calificaciones
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonDe EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonCalificación: 5 de 5 estrellas5/5 (2)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tDe EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tCalificación: 4.5 de 5 estrellas4.5/5 (27)
- Teach Yourself Electricity and Electronics, 6th EditionDe EverandTeach Yourself Electricity and Electronics, 6th EditionCalificación: 3.5 de 5 estrellas3.5/5 (15)
- Heat Transfer Engineering: Fundamentals and TechniquesDe EverandHeat Transfer Engineering: Fundamentals and TechniquesCalificación: 4 de 5 estrellas4/5 (1)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDe EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeCalificación: 4.5 de 5 estrellas4.5/5 (10)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersDe Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersCalificación: 5 de 5 estrellas5/5 (1)
- Build Your Own Electronics WorkshopDe EverandBuild Your Own Electronics WorkshopCalificación: 3.5 de 5 estrellas3.5/5 (3)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDe EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionCalificación: 4.5 de 5 estrellas4.5/5 (543)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)De EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Calificación: 4.5 de 5 estrellas4.5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesDe EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesCalificación: 5 de 5 estrellas5/5 (1)
- Current Interruption Transients CalculationDe EverandCurrent Interruption Transients CalculationCalificación: 4 de 5 estrellas4/5 (1)
- Power Electronics Diploma Interview Q&A: Career GuideDe EverandPower Electronics Diploma Interview Q&A: Career GuideAún no hay calificaciones
- Introduction to Power System ProtectionDe EverandIntroduction to Power System ProtectionAún no hay calificaciones