También podría gustarte
- Manual3Axis 10A PDFDocumento12 páginasManual3Axis 10A PDFLitus FendetestasAún no hay calificaciones
- Pololu - A4988 Stepper Motor Driver CarrierDocumento7 páginasPololu - A4988 Stepper Motor Driver CarrierJuan Alberto Casares ZaragozaAún no hay calificaciones
- Microstep Driver Manual: Version 6/13/2006Documento12 páginasMicrostep Driver Manual: Version 6/13/2006sandeshrai49Aún no hay calificaciones
- Datasheet 1182 PDFDocumento6 páginasDatasheet 1182 PDFabs0001Aún no hay calificaciones
- G540 REV8 ManualDocumento10 páginasG540 REV8 ManualJoseph Michael MirasoleAún no hay calificaciones
- Drv8825 DriveDocumento9 páginasDrv8825 DriveSimone MolinaroAún no hay calificaciones
- G540 Manual Rev8Documento10 páginasG540 Manual Rev8andienAún no hay calificaciones
- A4988 Stepper Motor Driver Carrier, Black EditionDocumento5 páginasA4988 Stepper Motor Driver Carrier, Black EditionRadersAún no hay calificaciones
- Esc YEP 150ADocumento2 páginasEsc YEP 150AAltemarFernandesdeOliveiraAún no hay calificaciones
- Atuador ADB225 PIB2000 - C - 225 SeriesDocumento1 páginaAtuador ADB225 PIB2000 - C - 225 SeriesnandomataAún no hay calificaciones
- 6 Spindle Drive and MotorDocumento34 páginas6 Spindle Drive and MotorRogerAún no hay calificaciones
- Anexo D-Manual BigEasyDriver PDFDocumento6 páginasAnexo D-Manual BigEasyDriver PDFenmanuel316Aún no hay calificaciones
- EF03063 ElecFreaksDocumento7 páginasEF03063 ElecFreaksElectronicos CaldasAún no hay calificaciones
- Applied Motion 3540moDocumento10 páginasApplied Motion 3540moPham TruongAún no hay calificaciones
- User's Manual: Step Motor DriverDocumento20 páginasUser's Manual: Step Motor DriverAdalmi Santos SilvaAún no hay calificaciones
- AC Module and Generator Control GuideDocumento13 páginasAC Module and Generator Control GuideprindioAún no hay calificaciones
- G320X REV-10 Manual FormattedDocumento7 páginasG320X REV-10 Manual FormattedNghia Nguyen TrongAún no hay calificaciones
- ISO 9001 CERTIFIED SPEED CONTROL UNIT DOCUMENTDocumento2 páginasISO 9001 CERTIFIED SPEED CONTROL UNIT DOCUMENTajcapetillog100% (2)
- Autostart 700 (Model Numbers AS3/E ) : Engine/Generator Controller Installation Reference SheetDocumento2 páginasAutostart 700 (Model Numbers AS3/E ) : Engine/Generator Controller Installation Reference SheetMH..2023Aún no hay calificaciones
- ESD5100 Series Speed Control UnitDocumento2 páginasESD5100 Series Speed Control UnitJaimeCoelloAún no hay calificaciones
- Sabertooth 2 X 10Documento19 páginasSabertooth 2 X 10César HernándezAún no hay calificaciones
- Gecko Drive g340 - 815e28e418 PDFDocumento7 páginasGecko Drive g340 - 815e28e418 PDFRemus PopescuAún no hay calificaciones
- C2002 Speed Control Unit PDFDocumento5 páginasC2002 Speed Control Unit PDFParesh Patel100% (1)
- Variador Yanwa AcerosDocumento9 páginasVariador Yanwa Acerosjuan Carlos GonzalezAún no hay calificaciones
- PmaDocumento1 páginaPmaTejaswi VermaAún no hay calificaciones
- Trouble Shooting - Magnaplus / Mariner / Harsh DutyDocumento10 páginasTrouble Shooting - Magnaplus / Mariner / Harsh Dutyrizky ListyawanAún no hay calificaciones
- DC Motor Control ManualDocumento15 páginasDC Motor Control Manualatgordon1Aún no hay calificaciones
- Reliance InstructionsDocumento1 páginaReliance InstructionsDaniel SalvatoreAún no hay calificaciones
- Fadal Spindle Drive and MotorsDocumento30 páginasFadal Spindle Drive and Motorsjavier.pro.dynamicAún no hay calificaciones
- Electric Motor ControlsDocumento14 páginasElectric Motor Controlsvishnu3598Aún no hay calificaciones
- GSC300Documento21 páginasGSC300saneesh81Aún no hay calificaciones
- Stepper Motor Driver Considerations Common ProblemsDocumento12 páginasStepper Motor Driver Considerations Common ProblemsErnesto Salomon Jaldín MendezAún no hay calificaciones
- Rsd110-6 Stepping Motor Driver ManualDocumento14 páginasRsd110-6 Stepping Motor Driver ManualAziz Nihat GürsoyAún no hay calificaciones
- s1000 Voltage RegulatorDocumento36 páginass1000 Voltage RegulatorAnonymous 7PtTlrAún no hay calificaciones
- Convert Single Phase Power to 3 PhaseDocumento8 páginasConvert Single Phase Power to 3 PhaseAngel MontellanoAún no hay calificaciones
- Varispeed-RC: Power Regenerative Unit (VS-656RC5)Documento15 páginasVarispeed-RC: Power Regenerative Unit (VS-656RC5)physicudoAún no hay calificaciones
- Using Baldor Motors as Micro-Hydro GeneratorsDocumento4 páginasUsing Baldor Motors as Micro-Hydro GeneratorsAdrián Gael Nina EscobarAún no hay calificaciones
- DYN110754 Technical Bulletin PDFDocumento6 páginasDYN110754 Technical Bulletin PDFMaksim PanfilovAún no hay calificaciones
- White Paper-Fire Pump Overcurrent ProtectionDocumento3 páginasWhite Paper-Fire Pump Overcurrent ProtectionMason McPikeAún no hay calificaciones
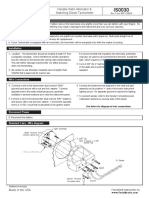
- Faria Diesel Tach Installation Is0030fDocumento2 páginasFaria Diesel Tach Installation Is0030fMichael TrimAún no hay calificaciones
- Onan RV Troubleshooting GuideDocumento17 páginasOnan RV Troubleshooting GuideBruce EgglestonAún no hay calificaciones
- Alternator & RegulatorDocumento7 páginasAlternator & Regulatorgentiles mdqAún no hay calificaciones
- MBC25081 Drive StepperDocumento7 páginasMBC25081 Drive StepperLuis PalenciaAún no hay calificaciones
- PWM Motor ControllerDocumento13 páginasPWM Motor ControllerPeuconAún no hay calificaciones
- Sabertooth 2x60 User GuideDocumento25 páginasSabertooth 2x60 User GuideDanilo SilvaAún no hay calificaciones
- Emko ATS10 Eng Short v00 PDFDocumento6 páginasEmko ATS10 Eng Short v00 PDFCarmen Serbanoiu33% (3)
- Trouble Shooting Pancake GeneratorsDocumento7 páginasTrouble Shooting Pancake GeneratorsRomel José Londoño CamachoAún no hay calificaciones
- Marquis Govt ShootDocumento3 páginasMarquis Govt ShootDaniel WellnerAún no hay calificaciones
- Application Information: Reference OnlyDocumento5 páginasApplication Information: Reference OnlyhumcataAún no hay calificaciones
- Voltage DropDocumento3 páginasVoltage DropbanyufAún no hay calificaciones
- Plugging An Induction MotorDocumento23 páginasPlugging An Induction MotorEngr Hamza Ali ImranAún no hay calificaciones
- Building A Phase ConverterDocumento11 páginasBuilding A Phase ConverterAlvaro Del CidAún no hay calificaciones
- Sabertooth 2x10 User's Guide: February 2007Documento19 páginasSabertooth 2x10 User's Guide: February 2007Hrishikesh GarudAún no hay calificaciones
- Hi-7 and Hi-8 Race Ignition Systems: Battery ConsiderationsDocumento8 páginasHi-7 and Hi-8 Race Ignition Systems: Battery ConsiderationssphinxxxxAún no hay calificaciones
- DataKom 537 - USERDocumento39 páginasDataKom 537 - USERKhaleel KhanAún no hay calificaciones
- Onan RV Troubleshooing GuideDocumento17 páginasOnan RV Troubleshooing GuideJohn Larson100% (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Calificación: 2.5 de 5 estrellas2.5/5 (3)
- Marine Electrics Made Simple or How to Keep the Batteries ChargedDe EverandMarine Electrics Made Simple or How to Keep the Batteries ChargedAún no hay calificaciones
- xxvrs232c 0630p0470Documento2 páginasxxvrs232c 0630p0470Tanvon MalikAún no hay calificaciones
- Venture Depliants Macchines For Industry - EngDocumento9 páginasVenture Depliants Macchines For Industry - EngTanvon MalikAún no hay calificaciones
- SecurePay Response CodesDocumento8 páginasSecurePay Response CodesM J RichmondAún no hay calificaciones
- Ps 11034Documento5 páginasPs 11034Tanvon MalikAún no hay calificaciones
- Programmable Logic Controllers (PLC) : (Reading For "Elements of Industrial Automation" at ELDE)Documento0 páginasProgrammable Logic Controllers (PLC) : (Reading For "Elements of Industrial Automation" at ELDE)rajserajAún no hay calificaciones
- Novakon Novakon Novakon Novakon Systems Ltd. Systems Ltd. Systems Ltd. Systems LTDDocumento1 páginaNovakon Novakon Novakon Novakon Systems Ltd. Systems Ltd. Systems Ltd. Systems LTDTanvon MalikAún no hay calificaciones
- Facts Worth Knowing About Frequency ConvertersDocumento167 páginasFacts Worth Knowing About Frequency ConvertersEduardo SuarezAún no hay calificaciones
- Tulip FANRAM 11Manual-CompleteDocumento7 páginasTulip FANRAM 11Manual-CompleteTanvon MalikAún no hay calificaciones
- Micromo Magnetic Encoders: Integral Encoder Series Ie2-512Documento2 páginasMicromo Magnetic Encoders: Integral Encoder Series Ie2-512Tanvon MalikAún no hay calificaciones
- Novakon Novakon Novakon Novakon Systems Ltd. Systems Ltd. Systems Ltd. Systems LTDDocumento1 páginaNovakon Novakon Novakon Novakon Systems Ltd. Systems Ltd. Systems Ltd. Systems LTDTanvon MalikAún no hay calificaciones
- Novakon Novakon Novakon Novakon Systems Ltd. Systems Ltd. Systems Ltd. Systems LTDDocumento1 páginaNovakon Novakon Novakon Novakon Systems Ltd. Systems Ltd. Systems Ltd. Systems LTDTanvon MalikAún no hay calificaciones
- NEMA 34 RHT Series Stepper MotorsDocumento1 páginaNEMA 34 RHT Series Stepper MotorsTanvon MalikAún no hay calificaciones
- Rs23 OverviewDocumento2 páginasRs23 OverviewTanvon MalikAún no hay calificaciones
- rs34 600dDocumento1 páginars34 600dTanvon MalikAún no hay calificaciones
- rs34 600dDocumento1 páginars34 600dTanvon MalikAún no hay calificaciones
- Novakon Novakon Novakon Novakon Systems Ltd. Systems Ltd. Systems Ltd. Systems LTDDocumento1 páginaNovakon Novakon Novakon Novakon Systems Ltd. Systems Ltd. Systems Ltd. Systems LTDTanvon MalikAún no hay calificaciones
- rht34 740dDocumento1 páginarht34 740dTanvon MalikAún no hay calificaciones
- rs23 370sDocumento1 páginars23 370sTanvon MalikAún no hay calificaciones
- Novakon Novakon Novakon Novakon Systems Ltd. Systems Ltd. Systems Ltd. Systems LTDDocumento1 páginaNovakon Novakon Novakon Novakon Systems Ltd. Systems Ltd. Systems Ltd. Systems LTDTanvon MalikAún no hay calificaciones
- rs23 370sDocumento1 páginars23 370sTanvon MalikAún no hay calificaciones
- Novakon Novakon Novakon Novakon Systems Ltd. Systems Ltd. Systems Ltd. Systems LTDDocumento1 páginaNovakon Novakon Novakon Novakon Systems Ltd. Systems Ltd. Systems Ltd. Systems LTDTanvon MalikAún no hay calificaciones
- DM 103vaDocumento2 páginasDM 103vaTanvon MalikAún no hay calificaciones
- Delem: Modularity SolutionsDocumento2 páginasDelem: Modularity SolutionsTanvon MalikAún no hay calificaciones
- rht34 1200sDocumento1 páginarht34 1200sTanvon MalikAún no hay calificaciones
- VBend FlyerDocumento1 páginaVBend FlyerTanvon MalikAún no hay calificaciones
- VBend GBDocumento2 páginasVBend GBTanvon MalikAún no hay calificaciones
- Leaflet Delem Profile-W enDocumento2 páginasLeaflet Delem Profile-W enTanvon MalikAún no hay calificaciones
- Ethernet SmoothStepper User Manual SetupDocumento23 páginasEthernet SmoothStepper User Manual SetupTanvon MalikAún no hay calificaciones
- 095 Lee Vs CADocumento2 páginas095 Lee Vs CAjoyce100% (3)
- Reports Leading Practices in Report TestingDocumento18 páginasReports Leading Practices in Report TestingRoberto VegaAún no hay calificaciones
- Latin MaximsDocumento4 páginasLatin MaximsYlourah SarmientoAún no hay calificaciones
- All Cases Case BriefDocumento96 páginasAll Cases Case BriefRosalie GomezAún no hay calificaciones
- Indian SucessionDocumento23 páginasIndian SucessionArunaMLAún no hay calificaciones
- ArizonaDocumento2 páginasArizonaJesus SaenzAún no hay calificaciones
- GstnoidaDocumento3 páginasGstnoidaRohit SandhuAún no hay calificaciones
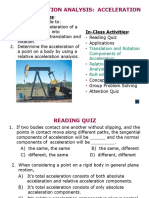
- 16 5 Relative Acceleration PDFDocumento24 páginas16 5 Relative Acceleration PDFSindhu BabuAún no hay calificaciones
- Generational Conflict in HamletDocumento5 páginasGenerational Conflict in HamletADM100% (1)
- ND Admission Offer Civil Engineering Daily Part TimeDocumento2 páginasND Admission Offer Civil Engineering Daily Part Timeadekola MuhydeenAún no hay calificaciones
- Tanner Clark Jailing PCDocumento2 páginasTanner Clark Jailing PCHunter GeiselAún no hay calificaciones
- Approval Form For Material Gate Pass 内部出门证: COD Muhammed Thanzeel 8424503 0580281560Documento1 páginaApproval Form For Material Gate Pass 内部出门证: COD Muhammed Thanzeel 8424503 0580281560Muhammed ThanzeelAún no hay calificaciones
- Application Form Post 03. Police Constable Driver (BPS - 05) PDFDocumento4 páginasApplication Form Post 03. Police Constable Driver (BPS - 05) PDFAgha SarfrazAún no hay calificaciones
- PCDA-Rev Advisory For Pensioners SPARSHDocumento5 páginasPCDA-Rev Advisory For Pensioners SPARSHSandeep KumarAún no hay calificaciones
- Full Download International Business Competing in The Global Marketplace 9th Edition Hill Test BankDocumento36 páginasFull Download International Business Competing in The Global Marketplace 9th Edition Hill Test Bankjantaeperans100% (37)
- Patchouli Oil MSDS: Section 1: Chemical Product and Company IdentificationDocumento5 páginasPatchouli Oil MSDS: Section 1: Chemical Product and Company IdentificationMutriono OzhoraAún no hay calificaciones
- 3063 Exam1 Solutions Sp07Documento6 páginas3063 Exam1 Solutions Sp07Muhammad Nomaan ❊Aún no hay calificaciones
- 14216/ganga Gomti Exp Chair Car (CC) : WL WLDocumento2 páginas14216/ganga Gomti Exp Chair Car (CC) : WL WLmanu6643_Aún no hay calificaciones
- C - TS460 - 1610 SAP Certified Application Associate SAP S-2F4HANA Sales (1610) !! PDFDocumento43 páginasC - TS460 - 1610 SAP Certified Application Associate SAP S-2F4HANA Sales (1610) !! PDFSabrina Pattini100% (3)
- Urc 522Documento13 páginasUrc 522Linh LinhAún no hay calificaciones
- Chemical Delivery Service Draft ContractDocumento83 páginasChemical Delivery Service Draft ContractAF Dowell MirinAún no hay calificaciones
- UNICEF SummaryDocumento3 páginasUNICEF SummaryCarloAún no hay calificaciones
- Sample of Affidavit of Complaint THEFT FINAL 1Documento2 páginasSample of Affidavit of Complaint THEFT FINAL 1Yolly Ces SecretariaAún no hay calificaciones
- YBhg. Encik Talat Mahmood Bin Abdul RashidDocumento1 páginaYBhg. Encik Talat Mahmood Bin Abdul RashidAlex Xander0% (1)
- Crib Sheet FinalDocumento2 páginasCrib Sheet FinalJordanDouce100% (2)
- RSA Archer Policy Management: Build Your Governance, Risk and Compliance Program On A Firm FoundationDocumento2 páginasRSA Archer Policy Management: Build Your Governance, Risk and Compliance Program On A Firm Foundationnmukherjee20Aún no hay calificaciones
- Sales CasesDocumento107 páginasSales CasesLorraine DianoAún no hay calificaciones
- Nepal's Financial Reporting Standards PrefaceDocumento4 páginasNepal's Financial Reporting Standards PrefaceSandeep GyawaliAún no hay calificaciones
- Public International Law-Nationality and StatelessnessDocumento6 páginasPublic International Law-Nationality and StatelessnessElias A ApallaAún no hay calificaciones