También podría gustarte
- Test de DIDC Diagnóstico Integral de Dominancia Cerebral de GardiéDocumento6 páginasTest de DIDC Diagnóstico Integral de Dominancia Cerebral de Gardiémario buelvas100% (1)
- Proyecto Cuidado Del AguaDocumento53 páginasProyecto Cuidado Del Aguaemanuelprintemps84% (25)
- Herramienta MWDDocumento8 páginasHerramienta MWDCony MarAún no hay calificaciones
- La Pulperia9julioDocumento4 páginasLa Pulperia9julioSabrina PerriAún no hay calificaciones
- EL PRINCIPE Reporte de LecturaDocumento5 páginasEL PRINCIPE Reporte de LecturaJaime Ulises Gomez GonzalezAún no hay calificaciones
- AUTOMATIZACIONDocumento4 páginasAUTOMATIZACIONJuan Carlos TidoniAún no hay calificaciones
- El DoloDocumento2 páginasEl DoloAbel Quiroz PachecoAún no hay calificaciones
- López Javier Producto4 Infografía Metodologías ProyectosDocumento2 páginasLópez Javier Producto4 Infografía Metodologías ProyectosjackAún no hay calificaciones
- El Nuevo Teatro Documento en Uruguay Argentina ChileDocumento14 páginasEl Nuevo Teatro Documento en Uruguay Argentina ChileGastón BorgesAún no hay calificaciones
- Cuadernillo-20220423 154731FrU7Documento4 páginasCuadernillo-20220423 154731FrU7JHON DAVID CCOSI CAHUIAún no hay calificaciones
- Cuantía mínima en losas, hipótesis de vigas y diferencias entre vigas de equilibrio y arriostreDocumento4 páginasCuantía mínima en losas, hipótesis de vigas y diferencias entre vigas de equilibrio y arriostreIsrael Guzman Meneses100% (1)
- 1ab-Sem1-Actv 7-Exp.8-Mat.Documento6 páginas1ab-Sem1-Actv 7-Exp.8-Mat.jean carlos aguilar blasAún no hay calificaciones
- Dalia Botanica 1Documento15 páginasDalia Botanica 1EdilterAún no hay calificaciones
- Guia Economía Escasez y Bienes 10°Documento3 páginasGuia Economía Escasez y Bienes 10°Sandra Lorena HincapiéAún no hay calificaciones
- Cuadro Proyecto 1Documento2 páginasCuadro Proyecto 1Emely Alarcon AdrianzenAún no hay calificaciones
- POD HD500 Advanced Guide v2.0 - Spanish (Rev A)Documento121 páginasPOD HD500 Advanced Guide v2.0 - Spanish (Rev A)cta5Aún no hay calificaciones
- Crítica de La Razón Migrante. Bustamante, Carolina. Godoy, Vega, Francisco. (2014)Documento43 páginasCrítica de La Razón Migrante. Bustamante, Carolina. Godoy, Vega, Francisco. (2014)Gabriela MontoyaAún no hay calificaciones
- Producción Minera Metálica de Oro (GRS.F) - 2019Documento16 páginasProducción Minera Metálica de Oro (GRS.F) - 2019jcapaniAún no hay calificaciones
- 1126 Det Cord SDS PDFDocumento11 páginas1126 Det Cord SDS PDFAmparo de Jesus Flores CardielAún no hay calificaciones
- Salud Mental y Discapacidad Auditiva La Lengua de Señas y Otras Estrategias de Atención Utilizadas Por Psicólogos en Terapia Con Pacientes Con Discapacidad AuditivaDocumento32 páginasSalud Mental y Discapacidad Auditiva La Lengua de Señas y Otras Estrategias de Atención Utilizadas Por Psicólogos en Terapia Con Pacientes Con Discapacidad AuditivaConsuelo Torrealba ArriolaAún no hay calificaciones
- MÉDULA ESPINAL (Tortora)Documento21 páginasMÉDULA ESPINAL (Tortora)Johannys AngaritaAún no hay calificaciones
- Manual Osciloscopio HP 54600BDocumento13 páginasManual Osciloscopio HP 54600Bivanovich87mxAún no hay calificaciones
- 2017 Mantenimiento Preventivo de Juntas MonoliticasDocumento6 páginas2017 Mantenimiento Preventivo de Juntas Monoliticasjorge armandoAún no hay calificaciones
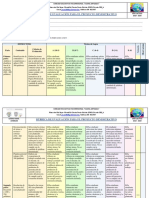
- Rúbrica de evaluación para proyecto demostrativoDocumento5 páginasRúbrica de evaluación para proyecto demostrativoAndrewAndy100% (2)
- 3 Guía Práctica InfluencersDocumento3 páginas3 Guía Práctica Influencersrafael valdebenitoAún no hay calificaciones
- Sistema EléctricoDocumento14 páginasSistema EléctricoCRISTHIAN DIAZ GAMBOAAún no hay calificaciones
- Validación de la práctica psicopedagógica: problemas históricosDocumento13 páginasValidación de la práctica psicopedagógica: problemas históricosLuciana NietoAún no hay calificaciones
- 56146-Reglamento Interno de Orden (Reparado)Documento45 páginas56146-Reglamento Interno de Orden (Reparado)Totto LeonardoAún no hay calificaciones
- LITIODocumento19 páginasLITIOCheryl jobeth SmarthAún no hay calificaciones
- Cementos LimaDocumento8 páginasCementos LimaScherry15Aún no hay calificaciones