También podría gustarte
- Lengajes Estructurados de Programación ExplicitaDocumento3 páginasLengajes Estructurados de Programación ExplicitaYair Gonzalez VillaAún no hay calificaciones
- 1 7 Epn Clasificacion MLPDocumento117 páginas1 7 Epn Clasificacion MLPAndy PozoAún no hay calificaciones
- Temario Sistemas de ControlDocumento6 páginasTemario Sistemas de ControlOzwa Garcia JuarezAún no hay calificaciones
- Drive Your Future SUVDocumento10 páginasDrive Your Future SUVLisbeth RomeroAún no hay calificaciones
- Ficha Tecnica Maquina MezcladoraDocumento1 páginaFicha Tecnica Maquina MezcladoraMaria Jose Sandoval GuevaraAún no hay calificaciones
- Monografia Brazo Robotico 1Documento106 páginasMonografia Brazo Robotico 1anon_678365461Aún no hay calificaciones
- Curvas Tipo RameyDocumento9 páginasCurvas Tipo RameyViancaAún no hay calificaciones
- Interrupciones, Reset y Recursos Auxiliares Pic16f84Documento23 páginasInterrupciones, Reset y Recursos Auxiliares Pic16f84Mayki de la CruzAún no hay calificaciones
- Ss01solicitud InicioDocumento3 páginasSs01solicitud InicioAnonymous I6J1YsGF2Aún no hay calificaciones
- Plano Junta UniversalDocumento1 páginaPlano Junta UniversalJhorlin David Alvear RoaAún no hay calificaciones
- Practica de Sis 457Documento10 páginasPractica de Sis 457Emanuel ChusgoAún no hay calificaciones
- Ejercicios C++ ForDocumento16 páginasEjercicios C++ ForTu Chiquito Luis Jonayquer Zapata0% (1)
- LPAIC2010Documento189 páginasLPAIC2010Oskar RockdriguezAún no hay calificaciones
- Sumador BCDDocumento16 páginasSumador BCDRodrigo YañezAún no hay calificaciones
- Arquitectura interna microcontroladoresDocumento7 páginasArquitectura interna microcontroladoresAbraham CortezAún no hay calificaciones
- Trabajo Bloque 1Documento15 páginasTrabajo Bloque 1jake kawaiiAún no hay calificaciones
- Robotica EspacialDocumento9 páginasRobotica EspacialMerci Bazan CalderonAún no hay calificaciones
- Interfase Periférica Programable (PPI - 8255) : Arquitectura de ComputadorasDocumento20 páginasInterfase Periférica Programable (PPI - 8255) : Arquitectura de ComputadorasRoberto Carlos Torres ChiritoAún no hay calificaciones
- Bobinas Set y ResetDocumento2 páginasBobinas Set y ResetamiguitoAún no hay calificaciones
- Almacen LpaicDocumento30 páginasAlmacen LpaicAndrees Liceea PiñaaAún no hay calificaciones
- Simulación procesos químicos HysysDocumento5 páginasSimulación procesos químicos HysysLuis Antonio Córdova HerediaAún no hay calificaciones
- Mapa conceptual SolarisDocumento8 páginasMapa conceptual SolarisSayda DominguezAún no hay calificaciones
- Programación SFC - Empacadora de huevos en RSLogix 5000Documento20 páginasProgramación SFC - Empacadora de huevos en RSLogix 5000IsmaelGuevaraAún no hay calificaciones
- Resumen Manejo de Errores SemanticosDocumento3 páginasResumen Manejo de Errores SemanticosAleex AlarconAún no hay calificaciones
- Manual de PracticaDocumento38 páginasManual de PracticaOsbaldo PulidoAún no hay calificaciones
- 03-RS-Logix - InstruccionesDocumento27 páginas03-RS-Logix - InstruccionesEmanuel AguirreAún no hay calificaciones
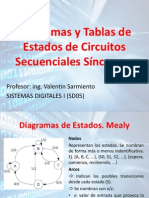
- Diagramas y Tablas de EstadoDocumento26 páginasDiagramas y Tablas de EstadoJhoel David Huarancca Ordoñes ChikiAún no hay calificaciones
- ¿Qué Es Un Lenguaje de Descripción de Hardware (HDL), Una GAL y y Un FPGA?Documento5 páginas¿Qué Es Un Lenguaje de Descripción de Hardware (HDL), Una GAL y y Un FPGA?Edgar ManríquezAún no hay calificaciones
- Llenado y VaciadoDocumento10 páginasLlenado y VaciadoRafael Rojas ZAún no hay calificaciones
- PCL HandBook. Petro Canada.Documento228 páginasPCL HandBook. Petro Canada.Oscar MataAún no hay calificaciones
- Tema 1 - Introduccion Verilog FPGA 14-Febrero-2018Documento109 páginasTema 1 - Introduccion Verilog FPGA 14-Febrero-2018Maria JoseAún no hay calificaciones
- C6 Perceptron Multicapa Parte 3Documento61 páginasC6 Perceptron Multicapa Parte 3Cinthia CrucesAún no hay calificaciones
- 01 - Introduccion Al PLCDocumento25 páginas01 - Introduccion Al PLCOmar Alex Meléndez HuamánAún no hay calificaciones
- Antecedentes de Los Fluidos en La Industria PetroleraDocumento10 páginasAntecedentes de Los Fluidos en La Industria PetroleraJose David Lopez MendezAún no hay calificaciones
- Flip FlopsDocumento16 páginasFlip FlopsVictor Hugo López CanAún no hay calificaciones
- Control de PWM Con LD PDFDocumento8 páginasControl de PWM Con LD PDFAndrés Ortega PlazaAún no hay calificaciones
- Diseño de Circuitos Lógicos Combinatorios PDFDocumento144 páginasDiseño de Circuitos Lógicos Combinatorios PDFGabriel Alejandro PlonerAún no hay calificaciones
- Manual de Operacion - Modelo 1250 SPANISHDocumento44 páginasManual de Operacion - Modelo 1250 SPANISHHectorMaldonado100% (1)
- Macro para Bloquear Celdas Después de EscribirDocumento2 páginasMacro para Bloquear Celdas Después de EscribirEudo Gonzalez100% (1)
- Esquema Mtu y RtuDocumento2 páginasEsquema Mtu y RtuMiguel Bsc100% (1)
- Tareas, Examenes y Actividades IYG May 15-2018Documento23 páginasTareas, Examenes y Actividades IYG May 15-2018SIOP IPCAún no hay calificaciones
- PIC 16F877A Laboratorio 8Documento5 páginasPIC 16F877A Laboratorio 8Alex Daniel GarciaAún no hay calificaciones
- Estructura Mecanica de Un RobotDocumento21 páginasEstructura Mecanica de Un RobotPalmeras01Aún no hay calificaciones
- Laboratorio Dynamixel PDFDocumento5 páginasLaboratorio Dynamixel PDFluis quitianAún no hay calificaciones
- Antología Estatica y Dinamica TSU MI 2009 UTCV PDFDocumento103 páginasAntología Estatica y Dinamica TSU MI 2009 UTCV PDFMtz Alberto100% (1)
- Historia breve funciones matemáticasDocumento8 páginasHistoria breve funciones matemáticasAbimael Erasmo Huamani MallmaAún no hay calificaciones
- Caracteristicas As IDocumento4 páginasCaracteristicas As IElton Cassas AguayoAún no hay calificaciones
- Simulink Ecuacion de BernoulliDocumento6 páginasSimulink Ecuacion de BernoulliDiego ArellanoAún no hay calificaciones
- Lab 3 Ing. Control II VeDocumento4 páginasLab 3 Ing. Control II VeWanderley Rojas DazaAún no hay calificaciones
- Re-10-Lab-141 Electronica de Potencia v9Documento50 páginasRe-10-Lab-141 Electronica de Potencia v9Hugo Alejandro Aliaga CalderonAún no hay calificaciones
- Reporte de Investigacion de Los PLD SDocumento21 páginasReporte de Investigacion de Los PLD SCyannLu100% (2)
- Taller4 1 Memorias y PLDDocumento3 páginasTaller4 1 Memorias y PLDKaro Pand FloresAún no hay calificaciones
- Celulas RobotizadasDocumento4 páginasCelulas RobotizadasOscarAún no hay calificaciones
- Estudio y Simulación CFD de Una Hélice para Propulsión de Un ROV - Jordi BartronsDocumento47 páginasEstudio y Simulación CFD de Una Hélice para Propulsión de Un ROV - Jordi BartronsEdemir SuarezAún no hay calificaciones
- Procedimiento de Puesta en Marcha - Impresora IntermecDocumento4 páginasProcedimiento de Puesta en Marcha - Impresora IntermecSERGEI CANDIDOUS VON SIEMENSAún no hay calificaciones
- Morfología de Los Robots IndustrialesDocumento21 páginasMorfología de Los Robots IndustrialesKevin CastilloAún no hay calificaciones
- RobotDocumento5 páginasRobotsupconAún no hay calificaciones
- Ac - 14 Programación Textual 1Documento16 páginasAc - 14 Programación Textual 1edgarAún no hay calificaciones
- Lenguajes de La RoboticaDocumento11 páginasLenguajes de La RoboticaMariSanchAún no hay calificaciones
- Brazos Roboticos y Lenguaje de ProgramacionDocumento3 páginasBrazos Roboticos y Lenguaje de ProgramacionMiguel Aparicio HernándezAún no hay calificaciones
- Estrategias de Busqueda Ensayo 2Documento3 páginasEstrategias de Busqueda Ensayo 2Dubraxka CalderónAún no hay calificaciones
- Relaciones InterpersonalesDocumento8 páginasRelaciones InterpersonalesDubraxka CalderónAún no hay calificaciones
- Ensayo Estrategias de BusquedaDocumento10 páginasEnsayo Estrategias de BusquedaDubraxka CalderónAún no hay calificaciones
- Mas Allá Del Sol CancionDocumento1 páginaMas Allá Del Sol CancionDubraxka CalderónAún no hay calificaciones
- Caramelos de Cianuro La Casa PartiturasDocumento4 páginasCaramelos de Cianuro La Casa PartiturasDubraxka CalderónAún no hay calificaciones
- Educación AmbientalDocumento5 páginasEducación AmbientalDubraxka CalderónAún no hay calificaciones
- Educación Ambiental CompletoDocumento10 páginasEducación Ambiental CompletoDubraxka CalderónAún no hay calificaciones
- Decreto para Vzla SeleccionDocumento1 páginaDecreto para Vzla SeleccionDubraxka CalderónAún no hay calificaciones
- Edu. sexual niños aula integradaDocumento60 páginasEdu. sexual niños aula integradaDubraxka CalderónAún no hay calificaciones
- Mi Manual de WRD - by MeDocumento38 páginasMi Manual de WRD - by MeGloriela79Aún no hay calificaciones
- TrucoDocumento3 páginasTrucoDubraxka CalderónAún no hay calificaciones
- Inteligencia Emocional MONOGRAFIADocumento9 páginasInteligencia Emocional MONOGRAFIADubraxka CalderónAún no hay calificaciones
- Organización Funcional Del Sistema NerviosoDocumento2 páginasOrganización Funcional Del Sistema NerviosoDubraxka CalderónAún no hay calificaciones
- JOELITO Manual de Power PointDocumento26 páginasJOELITO Manual de Power PointDubraxka CalderónAún no hay calificaciones
- Trabajo Daniel Gutierrez Elementos Del Capítulo IDocumento15 páginasTrabajo Daniel Gutierrez Elementos Del Capítulo IDubraxka CalderónAún no hay calificaciones
- 1-Las Relaciones Humanas en La EmpresaDocumento5 páginas1-Las Relaciones Humanas en La EmpresaThomas McintyreAún no hay calificaciones
- Trabajo Desarrollo Economico Jenny UGMADocumento17 páginasTrabajo Desarrollo Economico Jenny UGMADubraxka CalderónAún no hay calificaciones
- El Huerto EscolarDocumento4 páginasEl Huerto EscolarJoisy RojasAún no hay calificaciones
- Basquet para SamuelDocumento6 páginasBasquet para SamuelDubraxka CalderónAún no hay calificaciones
- Emmet Fox Los Siete Aspectos de DiosDocumento8 páginasEmmet Fox Los Siete Aspectos de Dioszav1704100% (1)
- El Lenguaje QuímicoDocumento20 páginasEl Lenguaje QuímicoDubraxka CalderónAún no hay calificaciones
- Introducción A La Ingeniería Telemática - UTFSM - 2008Documento35 páginasIntroducción A La Ingeniería Telemática - UTFSM - 2008ixcanetAún no hay calificaciones
- Meditaciones Diarias Thomas PrintzDocumento34 páginasMeditaciones Diarias Thomas Printzapi-370280089% (9)
- Fundamentos SociometríaDocumento30 páginasFundamentos SociometríaDubraxka CalderónAún no hay calificaciones
- Violencia Domestica Contra El HombreDocumento41 páginasViolencia Domestica Contra El HombreJoisy Rojas100% (1)
- Ecuaciones DiferencialesDocumento41 páginasEcuaciones DiferencialesDubraxka CalderónAún no hay calificaciones
- Porque CallarDocumento2 páginasPorque CallarDubraxka CalderónAún no hay calificaciones
- Lenguaje canino comunicaciónDocumento3 páginasLenguaje canino comunicaciónDubraxka CalderónAún no hay calificaciones
- Actividad 3 - Compartiendo Saberes en Torno A La Diversidad, La Inclusión y Las PoblacionesDocumento11 páginasActividad 3 - Compartiendo Saberes en Torno A La Diversidad, La Inclusión y Las Poblacionesyuri100% (1)
- Dificultades LecturaDocumento2 páginasDificultades Lecturaeli100% (1)
- Los AdjetivosDocumento9 páginasLos AdjetivosLina Marcela Córdoba ArangoAún no hay calificaciones
- Oxford English DictionaryDocumento10 páginasOxford English DictionaryManuel Andres GallónAún no hay calificaciones
- Acosta, Jose Miguel y Sueiro Yolanda, Una Historia de PelículaDocumento33 páginasAcosta, Jose Miguel y Sueiro Yolanda, Una Historia de PelículaVanessa MontenegroAún no hay calificaciones
- Síntesis Octavo Quiz...Documento25 páginasSíntesis Octavo Quiz...NiCoMaJoHoyosSuarezAún no hay calificaciones
- Borges. A La Muerte de Leopoldo LugonesDocumento3 páginasBorges. A La Muerte de Leopoldo LugonesFranco Gabriel CerianiAún no hay calificaciones
- Lectura 6 Murra John - Un Reino Aymara en 1567 PDFDocumento34 páginasLectura 6 Murra John - Un Reino Aymara en 1567 PDFFer Ramírez100% (2)
- Consonantes obstruyentes oclusivasDocumento7 páginasConsonantes obstruyentes oclusivasExclusiva CalcetaAún no hay calificaciones
- Prefijo y SufijoDocumento9 páginasPrefijo y SufijoFrancisco FonttAún no hay calificaciones
- Introduccion A La ProgramacionDocumento42 páginasIntroduccion A La ProgramacionQ paso amiguito100% (1)
- Deber1 Matematicas BasicasDocumento13 páginasDeber1 Matematicas BasicasKrlos Alvarez13% (8)
- GRM20 Segmentación y Correspondencia Entre El Sonido y Su Representación GráficaDocumento2 páginasGRM20 Segmentación y Correspondencia Entre El Sonido y Su Representación GráficaAlberto SandovalAún no hay calificaciones
- TFG-B 820Documento69 páginasTFG-B 820Rosa Maria Ccorahua ChiloAún no hay calificaciones
- Verbos Irregulares en InglésDocumento3 páginasVerbos Irregulares en InglésMTRO._MIGUEL_ANGEL_GARCIA_PEREZ100% (3)
- Propuesta Metodológica para El Análisis Del Vídeo Musical PDFDocumento8 páginasPropuesta Metodológica para El Análisis Del Vídeo Musical PDFAngello RevillaAún no hay calificaciones
- Análisis de La Obra Rosaura A Las DiezDocumento3 páginasAnálisis de La Obra Rosaura A Las DiezLucila WeberAún no hay calificaciones
- Clase No 07 - Citar y ParafrasearDocumento25 páginasClase No 07 - Citar y ParafrasearJonatan MartínezAún no hay calificaciones
- Esquema de Las VocalesDocumento4 páginasEsquema de Las VocaleschemaAún no hay calificaciones
- Actividad - Personal Social ReligiónDocumento11 páginasActividad - Personal Social ReligiónPablo Gómez ChávezAún no hay calificaciones
- Culturas indígenas del Caribe ColombianoDocumento4 páginasCulturas indígenas del Caribe ColombianoIvan HuykeAún no hay calificaciones
- LKMWDDocumento26 páginasLKMWDMEADASFDGWE100% (1)
- El Desarrollo de Los Ninos en Edad EscolarDocumento27 páginasEl Desarrollo de Los Ninos en Edad EscolarLuisa FernandaAún no hay calificaciones
- El Punto y Coma.Documento4 páginasEl Punto y Coma.Ducela MLAún no hay calificaciones
- Actividad 1Documento5 páginasActividad 1Gustavo RoqueAún no hay calificaciones
- Modalidades y Estrategias de LecturaDocumento1 páginaModalidades y Estrategias de LecturasusanaAún no hay calificaciones
- Elementos de La Competencia ComunicativaDocumento3 páginasElementos de La Competencia ComunicativaSarai PérezAún no hay calificaciones
- Unidad 1 LenguajeDocumento14 páginasUnidad 1 LenguajeFredy Rivera67% (3)
- LaminaDocumento2 páginasLaminaKarla Magdaly Julajuj AjiquichiAún no hay calificaciones
- Análisis comparativo entre discurso político y literarioDocumento6 páginasAnálisis comparativo entre discurso político y literarioTere VergaraAún no hay calificaciones