También podría gustarte
- Elevator Inspector: Passbooks Study GuideDe EverandElevator Inspector: Passbooks Study GuideAún no hay calificaciones
- SCM Go Flex: Product Technical SheetDocumento8 páginasSCM Go Flex: Product Technical SheetKen LeeAún no hay calificaciones
- Elevator Mechanic: Passbooks Study GuideDe EverandElevator Mechanic: Passbooks Study GuideAún no hay calificaciones
- Orona 3G X14 EN 1510Documento2 páginasOrona 3G X14 EN 1510mohammedalathwaryAún no hay calificaciones
- Elevator Apprentice: Passbooks Study GuideDe EverandElevator Apprentice: Passbooks Study GuideAún no hay calificaciones
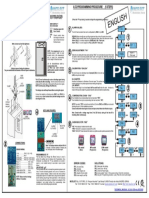
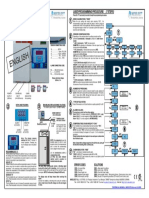
- TELÉFONO DE EMERGENCIA BÁSICODocumento50 páginasTELÉFONO DE EMERGENCIA BÁSICOmisubisi100% (1)
- Elevator Mechanic's Helper: Passbooks Study GuideDe EverandElevator Mechanic's Helper: Passbooks Study GuideAún no hay calificaciones
- User Manual: Elevator Door ControllerDocumento20 páginasUser Manual: Elevator Door ControllerHabboula MouradAún no hay calificaciones
- Blain Service Manual GBDocumento40 páginasBlain Service Manual GBsmsobhanAún no hay calificaciones
- Maintenance and service manual for elevator control valve EV 100 blainDocumento13 páginasMaintenance and service manual for elevator control valve EV 100 blaindragishabl100% (1)
- Cibes Catalogue PDFDocumento31 páginasCibes Catalogue PDFNold AlburoAún no hay calificaciones
- Synergy Element Brochure LowDocumento16 páginasSynergy Element Brochure Lowangela1590Aún no hay calificaciones
- Motala 2000 en Tekniskt BladDocumento4 páginasMotala 2000 en Tekniskt BladStacey HayesAún no hay calificaciones
- Endura MRL: Low-Rise ElevatorDocumento24 páginasEndura MRL: Low-Rise ElevatorMohd Abu AjajAún no hay calificaciones
- 100-184 ManualDocumento72 páginas100-184 ManualMohamedElsawiAún no hay calificaciones
- Innovative SIGMA MRL ElevatorDocumento16 páginasInnovative SIGMA MRL ElevatorAaron BermontAún no hay calificaciones
- Modernize Elevators with MCS 220 M ControllerDocumento1 páginaModernize Elevators with MCS 220 M ControllerTaha AlkibsiAún no hay calificaciones
- Lift Control SLC4 Information For The Expert I Subranges of The Main Card of Central Unit - AZE0Documento6 páginasLift Control SLC4 Information For The Expert I Subranges of The Main Card of Central Unit - AZE0raymon janszenAún no hay calificaciones
- Power Unit Inst - Instructions EngDocumento46 páginasPower Unit Inst - Instructions Engvaleriu.bosneaga6798100% (1)
- Icontrol AC Rel 3 4 42-02-2223 B5Documento414 páginasIcontrol AC Rel 3 4 42-02-2223 B5ElputoAmo XDAún no hay calificaciones
- ILC2 Installation and Programming GuideDocumento1 páginaILC2 Installation and Programming GuideJose Almeida100% (1)
- MAG Explorer Instructions TM7304 - R4Documento39 páginasMAG Explorer Instructions TM7304 - R4Robert AguilarAún no hay calificaciones
- Gen2 RobustaDocumento12 páginasGen2 RobustaKaveenSivasubramaniamAún no hay calificaciones
- Memcom+ Emergency Telephone Installation GuideDocumento90 páginasMemcom+ Emergency Telephone Installation GuideAnonymous Ih1EEEAún no hay calificaciones
- Security Expert OTIS HLI IntegrationDocumento10 páginasSecurity Expert OTIS HLI IntegrationJonathanA.LindoAún no hay calificaciones
- Helpy Star-ST56 - EngDocumento90 páginasHelpy Star-ST56 - EngElevator & Escalator Engineering100% (1)
- Instruction Manual: LM2A SeriesDocumento73 páginasInstruction Manual: LM2A SeriesроманAún no hay calificaciones
- Installation and Use Manual Control Panel and Prewired System Setronik1Documento55 páginasInstallation and Use Manual Control Panel and Prewired System Setronik1Coil980% (1)
- Micelect Technical Manual LM3D STD Din Ver 01.2004Documento1 páginaMicelect Technical Manual LM3D STD Din Ver 01.2004Armando100% (1)
- Fujitec Vietnam 1806Documento8 páginasFujitec Vietnam 1806Nguyen Hung0% (1)
- Elisha Graves OtisDocumento35 páginasElisha Graves OtisDilbagh_Singh_9643Aún no hay calificaciones
- Ethan Frome Quick Guide for Kollmorgen Control SystemDocumento31 páginasEthan Frome Quick Guide for Kollmorgen Control SystemJibjab7Aún no hay calificaciones
- GLC Manual PDFDocumento4 páginasGLC Manual PDFHendra WibisonoAún no hay calificaciones
- ELOSDocumento14 páginasELOSMostafa MohmmedAún no hay calificaciones
- Manual Lc100 en v8 3Documento145 páginasManual Lc100 en v8 3Ngoc Diem Nguyen100% (1)
- Tecnolift Catalogo EnglishDocumento107 páginasTecnolift Catalogo Englishbonongx100% (1)
- Datasheet Aritco 6000 enDocumento2 páginasDatasheet Aritco 6000 enBuzaareAún no hay calificaciones
- MCB Program Update Manual Version DDocumento10 páginasMCB Program Update Manual Version DMahmoud Omar RobAún no hay calificaciones
- Escalator Planning GuideDocumento24 páginasEscalator Planning GuideFERNSAún no hay calificaciones
- Release NotesDocumento359 páginasRelease NotesAnderson KrissAún no hay calificaciones
- Elex Door - Mitsubishi PLCDocumento16 páginasElex Door - Mitsubishi PLCHiei_zoldyckAún no hay calificaciones
- Saturn DriveDocumento21 páginasSaturn DrivefreddyjoertyAún no hay calificaciones
- User'S Manual: GMBH, GermanyDocumento167 páginasUser'S Manual: GMBH, GermanyAndres Felipe CaceresAún no hay calificaciones
- Control Board ELE-HL User's ManualDocumento40 páginasControl Board ELE-HL User's ManualMohd Abu Ajaj100% (2)
- 0288194 - B02 (19010185《NICE3000new电梯一...Documento320 páginas0288194 - B02 (19010185《NICE3000new电梯一...Le Huynh LongAún no hay calificaciones
- Instruction Manual: Fuji Electric Co., Ltd. INR-SI47-1894-EDocumento56 páginasInstruction Manual: Fuji Electric Co., Ltd. INR-SI47-1894-EXosé Nel Piedra FernándezAún no hay calificaciones
- QCM-320 Rev-B1 - NBDZDocumento19 páginasQCM-320 Rev-B1 - NBDZبن يامة حسام الدينAún no hay calificaciones
- KST Manual Online: NEW LIFT Know How We Lift You Up Where You BelongDocumento137 páginasKST Manual Online: NEW LIFT Know How We Lift You Up Where You BelongMehedi Hasan100% (1)
- MPHDocumento148 páginasMPHscariggy100% (1)
- An Instruction on Serial Control SystemsDocumento130 páginasAn Instruction on Serial Control SystemsCristian MillanAún no hay calificaciones
- Elevator Modernization Case StudyDocumento22 páginasElevator Modernization Case Studyvaratharajank100% (1)
- Model 840 Series Controller: Product Information SheetDocumento4 páginasModel 840 Series Controller: Product Information SheetMatti HynniAún no hay calificaciones
- X7 Terminal Technical SpecsDocumento2 páginasX7 Terminal Technical SpecsSyativahAún no hay calificaciones
- Elevator Details 01Documento4 páginasElevator Details 01Yasmine LeoncioAún no hay calificaciones
- Draka PCB CatalogDocumento55 páginasDraka PCB CatalogAidolan UlrichAún no hay calificaciones
- EE313Documento3 páginasEE313Jean Luis Saviñón100% (1)
- Steel W Orks Products (Thailand) : Elevator Controller SystemDocumento4 páginasSteel W Orks Products (Thailand) : Elevator Controller Systemtran xobonAún no hay calificaciones
- The Cabin Lift Cibes A6000 - Key FeaturesDocumento4 páginasThe Cabin Lift Cibes A6000 - Key FeaturesmecmakAún no hay calificaciones
- Mstk11-Gb Rev01 - Man Uso&Installaz Stk1 - GBDocumento57 páginasMstk11-Gb Rev01 - Man Uso&Installaz Stk1 - GBAhmad HamoudaAún no hay calificaciones
- Tlsv3 Autodialler Basic Functioning: Document Code: Last RevisionDocumento6 páginasTlsv3 Autodialler Basic Functioning: Document Code: Last RevisionEmadAún no hay calificaciones
- ListTags MadulariDocumento226 páginasListTags MadulariTanuTiganuAún no hay calificaciones
- SDSDFSFSDFDocumento296 páginasSDSDFSFSDFpanoskakAún no hay calificaciones
- Device Status Description Recommended Action: Reference Manual Section 6: TroubleshootingDocumento1 páginaDevice Status Description Recommended Action: Reference Manual Section 6: TroubleshootingTanuTiganuAún no hay calificaciones
- Operation and Maintenance Manual Section 5 Diagnostic ScreensDocumento1 páginaOperation and Maintenance Manual Section 5 Diagnostic ScreensTanuTiganuAún no hay calificaciones
- 6.2.1 Warnings : Explosions Could Result in Death or Serious InjuryDocumento1 página6.2.1 Warnings : Explosions Could Result in Death or Serious InjuryTanuTiganuAún no hay calificaciones
- Troubleshooting Rosemount 3051 Wireless TransmittersDocumento1 páginaTroubleshooting Rosemount 3051 Wireless TransmittersTanuTiganuAún no hay calificaciones
- 6.3 Removing From Service: Reference Manual Section 6: TroubleshootingDocumento1 página6.3 Removing From Service: Reference Manual Section 6: TroubleshootingTanuTiganuAún no hay calificaciones
- Bitlocker Verify LocationDocumento1 páginaBitlocker Verify LocationTanuTiganuAún no hay calificaciones
- Rosemount 3051 Wireless Pressure Transmitters: Pressure, Level, and Flow Solutions With Wirelesshart™ ProtocolDocumento1 páginaRosemount 3051 Wireless Pressure Transmitters: Pressure, Level, and Flow Solutions With Wirelesshart™ ProtocolTanuTiganuAún no hay calificaciones
- Emerson 3051 - 092Documento1 páginaEmerson 3051 - 092TanuTiganuAún no hay calificaciones
- Section 6 Troubleshooting: Table 6-1 Table 6-2 Table 6-3Documento1 páginaSection 6 Troubleshooting: Table 6-1 Table 6-2 Table 6-3TanuTiganuAún no hay calificaciones
- 5.5.3 Network Diagnostic Status Screens: Suply VoltsDocumento1 página5.5.3 Network Diagnostic Status Screens: Suply VoltsTanuTiganuAún no hay calificaciones
- 3051 WirelessHART Reference Accuracy ModelsDocumento1 página3051 WirelessHART Reference Accuracy ModelsTanuTiganuAún no hay calificaciones
- Suply Failur: Reference Manual Section 5: Operation and MaintenanceDocumento1 páginaSuply Failur: Reference Manual Section 5: Operation and MaintenanceTanuTiganuAún no hay calificaciones
- 5.4.3 Recall Factory Trim-Sensor TrimDocumento1 página5.4.3 Recall Factory Trim-Sensor TrimTanuTiganuAún no hay calificaciones
- Optimize transmitter performance with static line pressureDocumento1 páginaOptimize transmitter performance with static line pressureTanuTiganuAún no hay calificaciones
- 5.5.2 Diagnostic Button Screen Sequence: Abcde FGHDocumento1 página5.5.2 Diagnostic Button Screen Sequence: Abcde FGHTanuTiganuAún no hay calificaciones
- Troubleshoot Pressure Transmitter IssuesDocumento1 páginaTroubleshoot Pressure Transmitter IssuesTanuTiganuAún no hay calificaciones
- LT LRV + S X (LRV) X P: Reference Manual Section 5: Operation and MaintenanceDocumento1 páginaLT LRV + S X (LRV) X P: Reference Manual Section 5: Operation and MaintenanceTanuTiganuAún no hay calificaciones
- Device diagnostic screens manual sectionDocumento1 páginaDevice diagnostic screens manual sectionTanuTiganuAún no hay calificaciones
- 5.4.2 Sensor Trim: "Manifold Operation" On Page 50Documento1 página5.4.2 Sensor Trim: "Manifold Operation" On Page 50TanuTiganuAún no hay calificaciones
- Emerson 3051 - 081Documento1 páginaEmerson 3051 - 081TanuTiganuAún no hay calificaciones
- Field Communicator: Tag Device ID Network ID Network Join Status Device StatusDocumento1 páginaField Communicator: Tag Device ID Network ID Network Join Status Device StatusTanuTiganuAún no hay calificaciones
- Netwk Discnt: Reference Manual Section 5: Operation and MaintenanceDocumento1 páginaNetwk Discnt: Reference Manual Section 5: Operation and MaintenanceTanuTiganuAún no hay calificaciones
- Netwk OK: Reference Manual Section 5: Operation and MaintenanceDocumento1 páginaNetwk OK: Reference Manual Section 5: Operation and MaintenanceTanuTiganuAún no hay calificaciones
- Configuring HART Lock Using Field Communicator: Device Dashboard Fast KeysDocumento1 páginaConfiguring HART Lock Using Field Communicator: Device Dashboard Fast KeysTanuTiganuAún no hay calificaciones
- Emerson 3051 - 085Documento1 páginaEmerson 3051 - 085TanuTiganuAún no hay calificaciones
- SNSR Deg C: Reference Manual Section 5: Operation and MaintenanceDocumento1 páginaSNSR Deg C: Reference Manual Section 5: Operation and MaintenanceTanuTiganuAún no hay calificaciones
- 4.5 Configuring Transmitter Security: Function Key Sequence Menu ItemsDocumento1 página4.5 Configuring Transmitter Security: Function Key Sequence Menu ItemsTanuTiganuAún no hay calificaciones
- AMS Suite Wireless Configurator: Reference Manual Section 4: CommissioningDocumento1 páginaAMS Suite Wireless Configurator: Reference Manual Section 4: CommissioningTanuTiganuAún no hay calificaciones
- An Inexpensive BRDF Model For Physically-Based RenderingDocumento14 páginasAn Inexpensive BRDF Model For Physically-Based RenderingKmilo VinaTea ChavezAún no hay calificaciones
- Analysis of Benzoic Acid Kinetics Using Temperature vs Time GraphsDocumento3 páginasAnalysis of Benzoic Acid Kinetics Using Temperature vs Time GraphssnowinceptionAún no hay calificaciones
- CE - MECH - 2 DYNAMIC OF RIGID BODIES (2nd Semester S.Y. 2020-2021)Documento5 páginasCE - MECH - 2 DYNAMIC OF RIGID BODIES (2nd Semester S.Y. 2020-2021)Lyra GurimbaoAún no hay calificaciones
- Contrasts Between Finite and Infinite Dimensional Spaces and Between Normed and Inner Product SpacesDocumento5 páginasContrasts Between Finite and Infinite Dimensional Spaces and Between Normed and Inner Product SpacesQuinton WestrichAún no hay calificaciones
- Factors Affecting The Velocity of Sound in A GasDocumento2 páginasFactors Affecting The Velocity of Sound in A GasShuvam ShahAún no hay calificaciones
- Multistage CompressorDocumento12 páginasMultistage CompressorFahmi AliAún no hay calificaciones
- L&T Project ReportDocumento48 páginasL&T Project Reportdeepakarora201188Aún no hay calificaciones
- Energy Density Approach To Calculation of Inelastic Strain-Stress Near Notches and CracksDocumento25 páginasEnergy Density Approach To Calculation of Inelastic Strain-Stress Near Notches and CracksTanmay SinghAún no hay calificaciones
- Penguard HB - English (Uk) - Issued.06.12.2007Documento4 páginasPenguard HB - English (Uk) - Issued.06.12.2007Mohamed FaragAún no hay calificaciones
- Statistical and Thermal Physics Fundamentals and ApplicationsDocumento13 páginasStatistical and Thermal Physics Fundamentals and Applicationsgul jahanAún no hay calificaciones
- Newton's Law of Cooling ExplainedDocumento7 páginasNewton's Law of Cooling ExplainedReggie DuenasAún no hay calificaciones
- Gothic cathedral structural analysisDocumento43 páginasGothic cathedral structural analysisManuelPérezAún no hay calificaciones
- Why Phase Information Is Important For Diagnosing Machinery ProblemsDocumento3 páginasWhy Phase Information Is Important For Diagnosing Machinery ProblemsdinhdtAún no hay calificaciones
- POLARONS: Electron-Phonon Interactions in Polar CrystalsDocumento31 páginasPOLARONS: Electron-Phonon Interactions in Polar CrystalscaccaAún no hay calificaciones
- 3se3 100-1caDocumento5 páginas3se3 100-1cadainheniAún no hay calificaciones
- Electric Field and Coulomb's LawDocumento19 páginasElectric Field and Coulomb's LawYukiko HachiAún no hay calificaciones
- Class VIII Physics Force of Friction AssignmentDocumento1 páginaClass VIII Physics Force of Friction AssignmentVikash SharmaAún no hay calificaciones
- Performance Evaluation For Inerter-Based Dynamic Vibration AbsorbersDocumento28 páginasPerformance Evaluation For Inerter-Based Dynamic Vibration Absorbersgakada prbAún no hay calificaciones
- Boundary Wall DesignDocumento26 páginasBoundary Wall DesignAtanu Bhattacharya50% (2)
- General MT Procedure - Rekind OffshoreDocumento5 páginasGeneral MT Procedure - Rekind OffshoreNicko Arya Dharma100% (1)
- Important Link For Class XII - 1Documento3 páginasImportant Link For Class XII - 1Utsaw SagarAún no hay calificaciones
- Carta Psicometrica - CarrierDocumento1 páginaCarta Psicometrica - CarrierJonathan Andres0% (1)
- Role of Energy Loss On Discharge Characteristics of Sluice GatesDocumento25 páginasRole of Energy Loss On Discharge Characteristics of Sluice GatesBabak mahmoudiAún no hay calificaciones
- FIN330 Analysis 3Documento5 páginasFIN330 Analysis 3Jylle AmigoAún no hay calificaciones
- Carlye: Application Guide 575-012 Carlyle Control Module (CCM) Capacity and Protection ControlDocumento59 páginasCarlye: Application Guide 575-012 Carlyle Control Module (CCM) Capacity and Protection ControlDigeo MachadoAún no hay calificaciones
- Nioec SP 00 89 (R0) (Ed1)Documento8 páginasNioec SP 00 89 (R0) (Ed1)aminAún no hay calificaciones
- 3 Basic Electrical EngineeringDocumento4 páginas3 Basic Electrical EngineeringJyothsna VayyalaAún no hay calificaciones
- Astm E837-08Documento17 páginasAstm E837-08jodakiAún no hay calificaciones
- Photography March 2016Documento32 páginasPhotography March 2016ArtdataAún no hay calificaciones
- Monninghoff 546 - DatasheetDocumento11 páginasMonninghoff 546 - DatasheetirfannadineAún no hay calificaciones
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDe EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionCalificación: 4.5 de 5 estrellas4.5/5 (542)
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyDe EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyAún no hay calificaciones
- The Grid: The Fraying Wires Between Americans and Our Energy FutureDe EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureCalificación: 3.5 de 5 estrellas3.5/5 (48)
- Understanding Automotive Electronics: An Engineering PerspectiveDe EverandUnderstanding Automotive Electronics: An Engineering PerspectiveCalificación: 3.5 de 5 estrellas3.5/5 (16)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDe EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionCalificación: 4 de 5 estrellas4/5 (331)
- Introduction to Power System ProtectionDe EverandIntroduction to Power System ProtectionCalificación: 5 de 5 estrellas5/5 (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesDe EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesCalificación: 4.5 de 5 estrellas4.5/5 (21)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsDe EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsCalificación: 4 de 5 estrellas4/5 (1)
- Asset Integrity Management for Offshore and Onshore StructuresDe EverandAsset Integrity Management for Offshore and Onshore StructuresAún no hay calificaciones
- Idaho Falls: The Untold Story of America's First Nuclear AccidentDe EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentCalificación: 4.5 de 5 estrellas4.5/5 (21)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successDe EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successCalificación: 4.5 de 5 estrellas4.5/5 (3)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialDe EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialAún no hay calificaciones
- Flow Analysis for Hydrocarbon Pipeline EngineeringDe EverandFlow Analysis for Hydrocarbon Pipeline EngineeringAún no hay calificaciones
- Renewable Energy: A Very Short IntroductionDe EverandRenewable Energy: A Very Short IntroductionCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Shorting the Grid: The Hidden Fragility of Our Electric GridDe EverandShorting the Grid: The Hidden Fragility of Our Electric GridCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemDe EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemAún no hay calificaciones
- Implementing an Integrated Management System (IMS): The strategic approachDe EverandImplementing an Integrated Management System (IMS): The strategic approachCalificación: 5 de 5 estrellas5/5 (2)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowDe EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowAún no hay calificaciones
- 8051 Microcontroller: An Applications Based IntroductionDe Everand8051 Microcontroller: An Applications Based IntroductionCalificación: 5 de 5 estrellas5/5 (6)
- Nuclear Energy in the 21st Century: World Nuclear University PressDe EverandNuclear Energy in the 21st Century: World Nuclear University PressCalificación: 4.5 de 5 estrellas4.5/5 (3)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingDe EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingCalificación: 4 de 5 estrellas4/5 (1)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsDe EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsAún no hay calificaciones
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsDe EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsCalificación: 5 de 5 estrellas5/5 (2)
- Introduction to Power System ProtectionDe EverandIntroduction to Power System ProtectionAún no hay calificaciones
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026De EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Calificación: 5 de 5 estrellas5/5 (1)
- Build Your Own Electric Vehicle, Third EditionDe EverandBuild Your Own Electric Vehicle, Third EditionCalificación: 4.5 de 5 estrellas4.5/5 (3)