También podría gustarte
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Electricians GuideDocumento296 páginasElectricians Guidemaeid75% (4)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- 14810894 (1)Documento245 páginas14810894 (1)константин50% (2)
- Brain Filler Design GuideDocumento37 páginasBrain Filler Design GuideNick ChristakesAún no hay calificaciones
- ATPDraw EbookDocumento111 páginasATPDraw EbookMarcio De Andrade VogtAún no hay calificaciones
- Leading DigitalDocumento29 páginasLeading DigitalNitheesh RajAún no hay calificaciones
- Green Supply ChainDocumento11 páginasGreen Supply ChainNitheesh RajAún no hay calificaciones
- 120 C PDFDocumento14 páginas120 C PDFNitheesh RajAún no hay calificaciones
- Wireless Stepper Motor ControllersDocumento2 páginasWireless Stepper Motor ControllersNitheesh RajAún no hay calificaciones
- Dangote CementDocumento23 páginasDangote CementRobel FirewAún no hay calificaciones
- RVSDX Instruction Manual 23.09.2012Documento60 páginasRVSDX Instruction Manual 23.09.2012edgarcooAún no hay calificaciones
- DSARS0044817Documento4 páginasDSARS0044817Andresilitonga silitongaAún no hay calificaciones
- Transformer Basics and TransformerDocumento88 páginasTransformer Basics and TransformerV S RAún no hay calificaciones
- Catalogue en 60hzDocumento384 páginasCatalogue en 60hzjuan yenqueAún no hay calificaciones
- Slide 03Documento50 páginasSlide 03Nanang Roni WibowoAún no hay calificaciones
- Catalogo Om StandardDocumento49 páginasCatalogo Om StandardAli AlrasheedAún no hay calificaciones
- Tutorial 2 - Transmission Line PDFDocumento5 páginasTutorial 2 - Transmission Line PDFChristineAún no hay calificaciones
- Sure Servo ManualDocumento314 páginasSure Servo Manualclafel75Aún no hay calificaciones
- Caution: AMEREC AK4.5, AK7.5, AK11 and AK14 Steambath GeneratorsDocumento26 páginasCaution: AMEREC AK4.5, AK7.5, AK11 and AK14 Steambath GeneratorsWilber MontenegroAún no hay calificaciones
- Delta Sensorless Vector Control Compact Drive VFD-EL Series: Automation For A Changing WorldDocumento12 páginasDelta Sensorless Vector Control Compact Drive VFD-EL Series: Automation For A Changing WorldAl ZanoagaAún no hay calificaciones
- Sdg13lax 8e1 Manual v2Documento71 páginasSdg13lax 8e1 Manual v2JGT TAún no hay calificaciones
- E3MUPS100KHSDocumento4 páginasE3MUPS100KHSZak zsAún no hay calificaciones
- Unit III (Part III)Documento14 páginasUnit III (Part III)YUSRA MERAJAún no hay calificaciones
- Lab Manual: Electric Circuit Analysis I EEE-121Documento9 páginasLab Manual: Electric Circuit Analysis I EEE-121earn moneyAún no hay calificaciones
- Manual SIRIUS Contactors 3RT en-USDocumento516 páginasManual SIRIUS Contactors 3RT en-USAlfredo CordovaAún no hay calificaciones
- 3-Phase Transformer ConnectionsDocumento7 páginas3-Phase Transformer ConnectionsAnsar AwanAún no hay calificaciones
- Topics To Be Covered: Unit-2: Basic Circuit ElementsDocumento11 páginasTopics To Be Covered: Unit-2: Basic Circuit ElementsParthaAún no hay calificaciones
- ELP-850 Assignment 5Documento2 páginasELP-850 Assignment 5bathula pavanchandAún no hay calificaciones
- 1 - Manual NA003 M64 Version 01.11.01C - enDocumento115 páginas1 - Manual NA003 M64 Version 01.11.01C - enelektrocentarAún no hay calificaciones
- PlowDocumento26 páginasPlowNoman RizwanAún no hay calificaciones
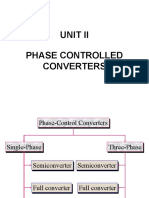
- Unit Ii Phase Controlled ConvertersDocumento102 páginasUnit Ii Phase Controlled ConverterscoolrajeeeAún no hay calificaciones
- HIB Imoticon User Guide V1.4.0 PDFDocumento12 páginasHIB Imoticon User Guide V1.4.0 PDFnicolaecomiciAún no hay calificaciones
- UP EN 50HzDocumento4 páginasUP EN 50HzRadu GheorghițăAún no hay calificaciones
- Abb Relion Ret650Documento378 páginasAbb Relion Ret650Yanfa'uni Ade Pradena WibowoAún no hay calificaciones
- PE Lect7.CompressedDocumento18 páginasPE Lect7.CompressedWuri Adining BagaskaraAún no hay calificaciones