También podría gustarte
- Fisica Walter - Teoría y Práctica. Perez TerrelDocumento801 páginasFisica Walter - Teoría y Práctica. Perez TerrelLucas De Maria88% (16)
- Aporte Técnico 14 Reparacion y Refuerzo de Estructuras de Ha. IchDocumento39 páginasAporte Técnico 14 Reparacion y Refuerzo de Estructuras de Ha. Ichmestre51Aún no hay calificaciones
- Manual de Practicas de Fisica FundamentalDocumento117 páginasManual de Practicas de Fisica FundamentalCarlos Campollo0% (1)
- Rueda de Liderazgo PDFDocumento1 páginaRueda de Liderazgo PDFraul lipaAún no hay calificaciones
- Integrales de línea en elipses y campos conservativosDocumento20 páginasIntegrales de línea en elipses y campos conservativosMargarita FariasAún no hay calificaciones
- 1) Notas Dinámica de Cuerpo RígidoDocumento116 páginas1) Notas Dinámica de Cuerpo RígidoValee Aguilar BernalAún no hay calificaciones
- Cinemática - Física GeneralDocumento124 páginasCinemática - Física GeneralJdlsla NfkldAún no hay calificaciones
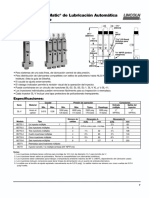
- Injector Lincoln SL-VDocumento1 páginaInjector Lincoln SL-Vraul lipaAún no hay calificaciones
- Chile Espera Reactivar Su Actividad Minera en Este 2019Documento2 páginasChile Espera Reactivar Su Actividad Minera en Este 2019raul lipaAún no hay calificaciones
- StegosaurusDocumento3 páginasStegosaurusraul lipaAún no hay calificaciones
- RM101 - Rumbo MineroDocumento194 páginasRM101 - Rumbo Mineroraul lipaAún no hay calificaciones
- Energias Renovables 2019Documento2 páginasEnergias Renovables 2019raul lipaAún no hay calificaciones
- 6-Speed Synchro Espanol Modif2Documento3 páginas6-Speed Synchro Espanol Modif2raul lipaAún no hay calificaciones
- Matematica Basica Utp - 11-20Documento10 páginasMatematica Basica Utp - 11-20raul lipaAún no hay calificaciones
- Bomba Combustible y Pre FiltroDocumento8 páginasBomba Combustible y Pre Filtroartid1967Aún no hay calificaciones
- 04 03-3663871esDocumento4 páginas04 03-3663871esraul lipaAún no hay calificaciones
- Matematica Basica Utp - 21-30Documento10 páginasMatematica Basica Utp - 21-30raul lipaAún no hay calificaciones
- EcuacionesRacionalesFraccionesParcialesDocumento51 páginasEcuacionesRacionalesFraccionesParcialesraul lipaAún no hay calificaciones
- 6-Speed Synchro Espanol Modif1Documento15 páginas6-Speed Synchro Espanol Modif1raul lipaAún no hay calificaciones
- AlgebraDocumento51 páginasAlgebraraul lipaAún no hay calificaciones
- Razonamiento Matematico 172-177Documento6 páginasRazonamiento Matematico 172-177raul lipaAún no hay calificaciones
- Algebratrigonometriageometriaanalitica 150101195922 11111Documento51 páginasAlgebratrigonometriageometriaanalitica 150101195922 11111raul lipaAún no hay calificaciones
- Razonamiento Matematico 139-144Documento6 páginasRazonamiento Matematico 139-144raul lipaAún no hay calificaciones
- Razonamiento Matematico 196-201Documento6 páginasRazonamiento Matematico 196-201raul lipaAún no hay calificaciones
- Razonamiento Matematico 190-195Documento6 páginasRazonamiento Matematico 190-195raul lipaAún no hay calificaciones
- Razonamiento Matematico 126-132Documento7 páginasRazonamiento Matematico 126-132raul lipaAún no hay calificaciones
- Razonamiento matemático con intervalos de longitudDocumento8 páginasRazonamiento matemático con intervalos de longitudraul lipaAún no hay calificaciones
- Razonamiento Matematico 184-189 PDFDocumento6 páginasRazonamiento Matematico 184-189 PDFraul lipaAún no hay calificaciones
- Razonamiento Matematico 166-170Documento5 páginasRazonamiento Matematico 166-170raul lipaAún no hay calificaciones
- Razonamiento Matematico 161-166Documento6 páginasRazonamiento Matematico 161-166raul lipaAún no hay calificaciones
- Razonamiento Matematico 145-151Documento7 páginasRazonamiento Matematico 145-151raul lipaAún no hay calificaciones
- Razonamiento Matematico 119-125Documento7 páginasRazonamiento Matematico 119-125raul lipaAún no hay calificaciones
- Razonamiento Matematico 133-138Documento6 páginasRazonamiento Matematico 133-138raul lipaAún no hay calificaciones
- Razonamiento Matematico 114-117 PDFDocumento4 páginasRazonamiento Matematico 114-117 PDFraul lipaAún no hay calificaciones
- Ciencias 2 Guia de Libro ADocumento58 páginasCiencias 2 Guia de Libro AItzel FloresAún no hay calificaciones
- Ejercicio Alg. Lineal Oct2019Documento2 páginasEjercicio Alg. Lineal Oct2019dannaAún no hay calificaciones
- Primer Parcial - Estructura de Datos - Siglo 21Documento2 páginasPrimer Parcial - Estructura de Datos - Siglo 21bastianm100% (1)
- Guía de estudio vectores UTNDocumento24 páginasGuía de estudio vectores UTNDaiana GomezAún no hay calificaciones
- Clase 5 - (Momentos 3d)Documento8 páginasClase 5 - (Momentos 3d)Luis GutierrezAún no hay calificaciones
- MovParabólicoDocumento15 páginasMovParabólicoAndres Gonzalez0% (1)
- Estática Unidad 1 y EjerciciosDocumento34 páginasEstática Unidad 1 y EjerciciosAndrésSolís67% (3)
- SI-162 - Algebra LinealDocumento6 páginasSI-162 - Algebra Linealvictor hugo salazar ninaAún no hay calificaciones
- Vectores AleatoriosDocumento18 páginasVectores AleatoriosAdelmo FernandezAún no hay calificaciones
- Geometría afín del espacio: vectores libres, dependencia, bases y ecuaciones de rectasDocumento20 páginasGeometría afín del espacio: vectores libres, dependencia, bases y ecuaciones de rectastxitxo123Aún no hay calificaciones
- 1.2 Angulo de FaseDocumento3 páginas1.2 Angulo de FaseIvan FrancoAún no hay calificaciones
- Aplicaciones de La Geometria DiferencialDocumento2 páginasAplicaciones de La Geometria DiferencialpatrickAún no hay calificaciones
- Equilibrio de La ParticulaDocumento13 páginasEquilibrio de La ParticulaWALTER MINCHOLA MENDOZAAún no hay calificaciones
- Examen en Linea de Fisica I 20220Documento2 páginasExamen en Linea de Fisica I 20220Abigail EcheandiaAún no hay calificaciones
- ApuntesDeFisica IDocumento171 páginasApuntesDeFisica IRamos Boris100% (3)
- Campo Magnético.Documento43 páginasCampo Magnético.Denisse VelásquezAún no hay calificaciones
- SISTEMAS SECUENCIALES v1.05 PDFDocumento51 páginasSISTEMAS SECUENCIALES v1.05 PDFfede_b7Aún no hay calificaciones
- Movimiento curvilíneo: componentes tangencial y normal, radial y transversalDocumento4 páginasMovimiento curvilíneo: componentes tangencial y normal, radial y transversalMelody GalarzaAún no hay calificaciones
- OpticaDocumento27 páginasOpticafernando SullcaAún no hay calificaciones
- Ejercicios Resueltos de Vectores y Matrices, Graficas GeogebraDocumento17 páginasEjercicios Resueltos de Vectores y Matrices, Graficas GeogebraEl boli jesusAún no hay calificaciones
- Sesión #03Documento12 páginasSesión #03Jhucely SeguraAún no hay calificaciones
- Evaluacion Final Escenario 8 Primer Bloque Ciencias Basicas Algebra LinealDocumento13 páginasEvaluacion Final Escenario 8 Primer Bloque Ciencias Basicas Algebra LinealAlexei CluteAún no hay calificaciones
- Solucion Prueba de Nivelacion FM 2017 18Documento9 páginasSolucion Prueba de Nivelacion FM 2017 18Jorge Perez GarciaAún no hay calificaciones
- Progmodb PDFDocumento2 páginasProgmodb PDFJohnAún no hay calificaciones
- Capítulo 1Documento32 páginasCapítulo 1GuzmánAún no hay calificaciones