También podría gustarte
- Exploratory Study On The Use of Crushed Cockle Shell As Partial Sand Replacement in ConcreteDocumento5 páginasExploratory Study On The Use of Crushed Cockle Shell As Partial Sand Replacement in ConcreteInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- A Case Study On Academic Services Application Using Agile Methodology For Mobile Cloud ComputingDocumento9 páginasA Case Study On Academic Services Application Using Agile Methodology For Mobile Cloud ComputingInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Congenital Malaria: Correlation of Umbilical Cord Plasmodium falciparum Parasitemia with Maternal Peripheral Blood Plasmodium falciparum Parasitemia in selected Hospitals in Jimeta Yola, Adamawa State, NigeriaDocumento6 páginasCongenital Malaria: Correlation of Umbilical Cord Plasmodium falciparum Parasitemia with Maternal Peripheral Blood Plasmodium falciparum Parasitemia in selected Hospitals in Jimeta Yola, Adamawa State, NigeriaInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Review: Nonlinear Techniques For Analysis of Heart Rate VariabilityDocumento16 páginasReview: Nonlinear Techniques For Analysis of Heart Rate VariabilityInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- A Short Report On Different Wavelets and Their StructuresDocumento5 páginasA Short Report On Different Wavelets and Their StructuresInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Dynamic Modeling For Gas Phase Propylene Copolymerization in A Fluidized Bed ReactorDocumento5 páginasDynamic Modeling For Gas Phase Propylene Copolymerization in A Fluidized Bed ReactorInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Study and Evaluation For Different Types of Sudanese Crude Oil PropertiesDocumento4 páginasStudy and Evaluation For Different Types of Sudanese Crude Oil PropertiesInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Positioning Error Analysis and Compensation of Differential Precision WorkbenchDocumento5 páginasPositioning Error Analysis and Compensation of Differential Precision WorkbenchInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- DDOS Attacks-A Stealthy Way of Implementation and DetectionDocumento6 páginasDDOS Attacks-A Stealthy Way of Implementation and DetectionInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- An Improved Fading Kalman Filter in The Application of BDS Dynamic PositioningDocumento8 páginasAn Improved Fading Kalman Filter in The Application of BDS Dynamic PositioningInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Experimental Study On Critical Closing Pressure of Mudstone Fractured ReservoirsDocumento5 páginasExperimental Study On Critical Closing Pressure of Mudstone Fractured ReservoirsInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- The Low-Temperature Radiant Floor Heating System Design and Experimental Study On Its Thermal ComfortDocumento6 páginasThe Low-Temperature Radiant Floor Heating System Design and Experimental Study On Its Thermal ComfortInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Structural Aspect On Carbon Dioxide Capture in NanotubesDocumento9 páginasStructural Aspect On Carbon Dioxide Capture in NanotubesInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Thesummaryabout Fuzzy Control Parameters Selected Based On Brake Driver Intention RecognitionDocumento6 páginasThesummaryabout Fuzzy Control Parameters Selected Based On Brake Driver Intention RecognitionInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Resistance of Dryland Rice To Stem Borer (Scirpophaga Incertulas WLK.) Using Organic FertilizerDocumento4 páginasResistance of Dryland Rice To Stem Borer (Scirpophaga Incertulas WLK.) Using Organic FertilizerInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Correlation Analysis of Tool Wear and Cutting Sound SignalDocumento5 páginasCorrelation Analysis of Tool Wear and Cutting Sound SignalInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Reduce Resources For Privacy in Mobile Cloud Computing Using Blowfish and DSA AlgorithmsDocumento10 páginasReduce Resources For Privacy in Mobile Cloud Computing Using Blowfish and DSA AlgorithmsInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- A Novel High-Precision Curvature-Compensated CMOS Bandgap Reference Without Using An Op-AmpDocumento6 páginasA Novel High-Precision Curvature-Compensated CMOS Bandgap Reference Without Using An Op-AmpInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Synergistic Effect of Halide Ions On The Corrosion Inhibition of Mild Steel in Sulphuric Acid Using Alkyl Substituted Piperidi-4 - One ThiosemicarbazonesDocumento8 páginasSynergistic Effect of Halide Ions On The Corrosion Inhibition of Mild Steel in Sulphuric Acid Using Alkyl Substituted Piperidi-4 - One ThiosemicarbazonesInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- An Understanding of The Electronic Bipolar Resistance Switching Behavior in Cu/TiO2/ITO StructureDocumento4 páginasAn Understanding of The Electronic Bipolar Resistance Switching Behavior in Cu/TiO2/ITO StructureInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- A Fast and Effective Impulse Noise FilterDocumento6 páginasA Fast and Effective Impulse Noise FilterInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Design of The Floating-Type Memristor Emulator and Its Circuit ImplementationDocumento7 páginasDesign of The Floating-Type Memristor Emulator and Its Circuit ImplementationInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Performance Measurement of Digital Modulation Schemes Using FPGADocumento6 páginasPerformance Measurement of Digital Modulation Schemes Using FPGAInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- I Extension of Some Common Fixed Point Theorems Using Compatible Mappings in Fuzzy Metric SpaceDocumento3 páginasI Extension of Some Common Fixed Point Theorems Using Compatible Mappings in Fuzzy Metric SpaceInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- A Mathematical Programming Approach For Selection of Variables in Cluster AnalysisDocumento9 páginasA Mathematical Programming Approach For Selection of Variables in Cluster AnalysisInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- BIM Based Organizational LearningDocumento9 páginasBIM Based Organizational LearningInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- Performance Analysis of Massive MIMO Downlink System With Imperfect Channel State InformationDocumento6 páginasPerformance Analysis of Massive MIMO Downlink System With Imperfect Channel State InformationInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- The Simulation Research of The Reamer of The Cutter Suction Dredger Based On ADAMSDocumento7 páginasThe Simulation Research of The Reamer of The Cutter Suction Dredger Based On ADAMSInternational Journal of Research in Engineering and ScienceAún no hay calificaciones
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2103)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Brochure CAT Advanced series-B-CATADV-112-ENDocumento21 páginasBrochure CAT Advanced series-B-CATADV-112-ENSelk CLAún no hay calificaciones
- Power BI DesktopDocumento7 páginasPower BI DesktopZaklina TrajkovskaAún no hay calificaciones
- COAL Lectures Week 13 Pat ADocumento33 páginasCOAL Lectures Week 13 Pat AK213156 Syed Abdul RehmanAún no hay calificaciones
- Connectivity Pack Info System en USDocumento226 páginasConnectivity Pack Info System en USCatCesarAún no hay calificaciones
- Azure DevOps - User CreationDocumento68 páginasAzure DevOps - User CreationInge SmitAún no hay calificaciones
- Part Number 60-41 Revision A: Instruction Manual Start-Up, Operation and MaintenanceDocumento208 páginasPart Number 60-41 Revision A: Instruction Manual Start-Up, Operation and MaintenanceJesus Oliveros100% (1)
- A Project Report On "Brand Strategy"Documento42 páginasA Project Report On "Brand Strategy"abhijit05533% (3)
- International Automotive Task Force TS16949 To IATF16949 Transition StrategyDocumento44 páginasInternational Automotive Task Force TS16949 To IATF16949 Transition StrategyyatheendravarmaAún no hay calificaciones
- HW 1 Eeowh 3Documento6 páginasHW 1 Eeowh 3정하윤Aún no hay calificaciones
- Advance Return Management For Supplier ReturnDocumento23 páginasAdvance Return Management For Supplier ReturnSAURAV MALLICKAún no hay calificaciones
- Gbat V Mock (3) IctDocumento8 páginasGbat V Mock (3) Ictfeddy anddy0% (1)
- SokkiaioDocumento24 páginasSokkiaioUlisesRiveraUrbanoAún no hay calificaciones
- Creating Delegate NodeDocumento26 páginasCreating Delegate NodeRama Krishna BAún no hay calificaciones
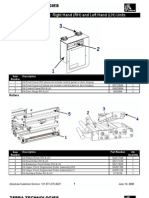
- 110PAX4 - Parts (2008)Documento7 páginas110PAX4 - Parts (2008)Jonathan LongAún no hay calificaciones
- UIHCT225-WNNN Owners Installation Operation Service Manual Rev 1.0Documento12 páginasUIHCT225-WNNN Owners Installation Operation Service Manual Rev 1.0bchunn2Aún no hay calificaciones
- OSI ModelDocumento23 páginasOSI ModelBijay LamaAún no hay calificaciones
- Resume - 2015 Oct 6 PgamblinDocumento3 páginasResume - 2015 Oct 6 Pgamblinapi-279372422Aún no hay calificaciones
- Project ReportDocumento61 páginasProject Reportlove goyal100% (2)
- Booster Unit Auto Backwash FilterDocumento5 páginasBooster Unit Auto Backwash FilterFardin NawazAún no hay calificaciones
- Syllabus 2017Documento3 páginasSyllabus 2017sandman21Aún no hay calificaciones
- Ray Tracing - Technical ReportDocumento8 páginasRay Tracing - Technical ReportCong-Son TranAún no hay calificaciones
- Fis-Opf Ach PaymentsDocumento5 páginasFis-Opf Ach PaymentscrazytrainAún no hay calificaciones
- Determine HWM and Reduce It by Shrink SpaceDocumento6 páginasDetermine HWM and Reduce It by Shrink SpaceSiva KumarAún no hay calificaciones
- Youth and Social MediaDocumento9 páginasYouth and Social MediaShreyas ShahaAún no hay calificaciones
- StatisticaDocumento22 páginasStatisticaBrenden KramerAún no hay calificaciones
- CV7001 Part 1 NoteDocumento267 páginasCV7001 Part 1 NoteasdasAún no hay calificaciones
- Architecture of Industrial Automation Systems: Unit-1 ECE361Documento20 páginasArchitecture of Industrial Automation Systems: Unit-1 ECE361anuj jainAún no hay calificaciones
- A. Excavation E. Materials Quantity Unit Unit Price Amount: E. Total Project CostDocumento6 páginasA. Excavation E. Materials Quantity Unit Unit Price Amount: E. Total Project CostPermits LicensingAún no hay calificaciones
- C DAC Winter Project Report-7Documento29 páginasC DAC Winter Project Report-7Sanchit AlekhAún no hay calificaciones
- Clmd4a Ictg6Documento25 páginasClmd4a Ictg6Rose RamosAún no hay calificaciones