También podría gustarte
- Angle of LolDocumento11 páginasAngle of LolNitinVanjariAún no hay calificaciones
- Seam 4 ADocumento4 páginasSeam 4 ARoy CamajalanAún no hay calificaciones
- Flotation and Buoyancy ExplainedDocumento35 páginasFlotation and Buoyancy ExplainedChris McLean100% (1)
- Centre of FloatationDocumento7 páginasCentre of FloatationBlack HawkAún no hay calificaciones
- Inclining Experiment: ObjectiveDocumento7 páginasInclining Experiment: ObjectiveAhmedYassinAún no hay calificaciones
- Ensuring Excellence at Sea through Naval ArchitectureDocumento21 páginasEnsuring Excellence at Sea through Naval ArchitectureNeo Miala100% (2)
- Ships Contruction and CalculationDocumento364 páginasShips Contruction and CalculationArmskieAún no hay calificaciones
- STABILITY AND TRIM DEFINITIONSDocumento27 páginasSTABILITY AND TRIM DEFINITIONSДмитрий ЯрычAún no hay calificaciones
- Air BlowerDocumento5 páginasAir BlowerFishAún no hay calificaciones
- CALCULATING STABILITY METRICS LIKE KB, BM AND GMDocumento16 páginasCALCULATING STABILITY METRICS LIKE KB, BM AND GMKunal BhatiaAún no hay calificaciones
- A Matter of Stability & TrimDocumento11 páginasA Matter of Stability & TrimJia Hann TanAún no hay calificaciones
- Determining hydrostatic particulars and stability metrics for shipsDocumento68 páginasDetermining hydrostatic particulars and stability metrics for shipssubhenduhatiAún no hay calificaciones
- Marine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersDe EverandMarine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersCalificación: 5 de 5 estrellas5/5 (1)
- IGCSE Topical Past Papers PhysicsDocumento64 páginasIGCSE Topical Past Papers PhysicsHubert DMelloAún no hay calificaciones
- Basic PrinciplesDocumento11 páginasBasic PrinciplesAshok KumarAún no hay calificaciones
- Trim and Stability - StandardDocumento41 páginasTrim and Stability - Standardwaleedyehia100% (1)
- Calculation of Stability For The Ships Loading Bulk Grain: BallastDocumento1 páginaCalculation of Stability For The Ships Loading Bulk Grain: Ballastsimon_midjajaAún no hay calificaciones
- Stability Theory IIIDocumento32 páginasStability Theory IIISergio RuedaAún no hay calificaciones
- FUJI FRONTIER 340E - PartslistDocumento172 páginasFUJI FRONTIER 340E - Partslistvitprint22Aún no hay calificaciones
- 6.6 Interaction Between A Hull & A Propeller: in Which The Propeller Is Working? (Later We Will Also Study TheDocumento31 páginas6.6 Interaction Between A Hull & A Propeller: in Which The Propeller Is Working? (Later We Will Also Study Thebehzad parsiAún no hay calificaciones
- CO2: Describe The Different Types of Ships in Reference To Their Design and PurposeDocumento63 páginasCO2: Describe The Different Types of Ships in Reference To Their Design and PurposeCarlo100% (1)
- WP 2 - Report 4 - Resistance and Propulsion Power - FINAL - October 2012Documento52 páginasWP 2 - Report 4 - Resistance and Propulsion Power - FINAL - October 2012jimmyy90Aún no hay calificaciones
- Doc. No. 1-42 18 100 011 - REDocumento17 páginasDoc. No. 1-42 18 100 011 - REsidan magnaAún no hay calificaciones
- Design DocumentDocumento10 páginasDesign DocumentLiza WoodsAún no hay calificaciones
- Damage Stability CalculationsDocumento12 páginasDamage Stability CalculationsleotvrdeAún no hay calificaciones
- Aqap2120 Ed 1 PDFDocumento18 páginasAqap2120 Ed 1 PDFmaccione4311Aún no hay calificaciones
- Hydrodynamic Interaction & SQUAT PDFDocumento49 páginasHydrodynamic Interaction & SQUAT PDFMaxiAún no hay calificaciones
- (Developments in Geotechnical Engineering 75) Sven Hansbo (Eds.) - Foundation Engineering-Academic Press, Elsevier (1994) PDFDocumento534 páginas(Developments in Geotechnical Engineering 75) Sven Hansbo (Eds.) - Foundation Engineering-Academic Press, Elsevier (1994) PDFপ্রিয়দীপ প্রিয়মAún no hay calificaciones
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsDe EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsAún no hay calificaciones
- Deterministic Damage Stability PDFDocumento44 páginasDeterministic Damage Stability PDFUngke KansilAún no hay calificaciones
- American Wide Flange Beams (2) (New)Documento21 páginasAmerican Wide Flange Beams (2) (New)Rahul Phadake100% (1)
- Quasi-Efficiency PropulsionDocumento31 páginasQuasi-Efficiency PropulsionWafaà WafaAún no hay calificaciones
- Mooring: Mooring Equipment MOORING: A Vessel Is Said To Be Moored When It Is Fastened To ADocumento7 páginasMooring: Mooring Equipment MOORING: A Vessel Is Said To Be Moored When It Is Fastened To AGaurav AgarwalAún no hay calificaciones
- 08-NAC-Curves of Stability and Stability Criteria (160213)Documento17 páginas08-NAC-Curves of Stability and Stability Criteria (160213)G SagunaAún no hay calificaciones
- Microsoft PowerPoint - Stability at Small Angles (Compatibility Mode)Documento37 páginasMicrosoft PowerPoint - Stability at Small Angles (Compatibility Mode)Mugilrajan DevarajanAún no hay calificaciones
- SCOTVEC STABILITY THEORYDocumento25 páginasSCOTVEC STABILITY THEORYMohan KrishnanAún no hay calificaciones
- Ship Stability Lecture NotesDocumento38 páginasShip Stability Lecture NotesMuhammadIlhamNugrohoAún no hay calificaciones
- Ship Geometry - IDocumento39 páginasShip Geometry - Isunnyasrahul raj100% (1)
- RINA - Trim & Stability BookletDocumento5 páginasRINA - Trim & Stability Bookletkevin kurnia marpaungAún no hay calificaciones
- Chapter 11Documento10 páginasChapter 11kapoz2009Aún no hay calificaciones
- Rudders: Semi Balanced Rudder Semi Balanced Rudder With Rudder HornDocumento10 páginasRudders: Semi Balanced Rudder Semi Balanced Rudder With Rudder Hornsunil1237Aún no hay calificaciones
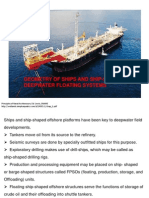
- Geometry of Ships and Ship-Shaped Deepwater Floating SystemsDocumento55 páginasGeometry of Ships and Ship-Shaped Deepwater Floating SystemsKrishnan ChockalingamAún no hay calificaciones
- Chapter 2 Curve Fitting, Regression and CorrelationDocumento18 páginasChapter 2 Curve Fitting, Regression and CorrelationRahul PhadakeAún no hay calificaciones
- Centre of BuoyancyDocumento4 páginasCentre of BuoyancyAnna E A. CamañoAún no hay calificaciones
- A General Discussion On Ship StabilityDocumento6 páginasA General Discussion On Ship StabilityAnonymous UCveMQAún no hay calificaciones
- Intro To NADocumento11 páginasIntro To NAAnshuman SharmaAún no hay calificaciones
- Small Angle StabilityDocumento8 páginasSmall Angle StabilityAthulRKrishnanAún no hay calificaciones
- Assignment 1 (Ship Resistance)Documento1 páginaAssignment 1 (Ship Resistance)KikiAún no hay calificaciones
- How Squat, Bank and Bank Cushion Effects Influence ShipsDocumento6 páginasHow Squat, Bank and Bank Cushion Effects Influence Shipsconcrete designAún no hay calificaciones
- Unit IDocumento24 páginasUnit IsomasundaramAún no hay calificaciones
- Floatation and Its Laws PDFDocumento2 páginasFloatation and Its Laws PDFtarak dasAún no hay calificaciones
- How High Speed Monohulls are Affected in Shallow WaterDocumento20 páginasHow High Speed Monohulls are Affected in Shallow WaterStalin ZapataAún no hay calificaciones
- 04 NAC Initial Transverse Stability (160213)Documento21 páginas04 NAC Initial Transverse Stability (160213)Gilles MathieuAún no hay calificaciones
- Buoyancy ForceDocumento3 páginasBuoyancy ForceCaroline Hon0% (1)
- Intact Stability and Stability in The Damaged ConditionDocumento14 páginasIntact Stability and Stability in The Damaged Conditionhrish732Aún no hay calificaciones
- 4.GSK and Ship Stability PDFDocumento28 páginas4.GSK and Ship Stability PDFTaufiq JahanAún no hay calificaciones
- E04-Ship Geometry & Hydrostatic CalculationsDocumento2 páginasE04-Ship Geometry & Hydrostatic Calculationsarise tettehAún no hay calificaciones
- DefinitionsDocumento3 páginasDefinitionsAhmed AboelmagdAún no hay calificaciones
- Form CoefficientsDocumento5 páginasForm CoefficientsjishnusajiAún no hay calificaciones
- Ship resistance and propulsion calculations using Guldhammer-Harvald and Holtrop methodsDocumento27 páginasShip resistance and propulsion calculations using Guldhammer-Harvald and Holtrop methodsSiskal DdAún no hay calificaciones
- Chapter 10 - Curves of Statical Stability (GZ Curves)Documento9 páginasChapter 10 - Curves of Statical Stability (GZ Curves)Adrian B.100% (1)
- Compass and Gyroscope: Integrating Science And Politics For The EnvironmentDe EverandCompass and Gyroscope: Integrating Science And Politics For The EnvironmentAún no hay calificaciones
- HandoutTransverse Statical StabilityDocumento6 páginasHandoutTransverse Statical StabilitySamAún no hay calificaciones
- Stability of Ships - 2Documento13 páginasStability of Ships - 2pothirajkalyanAún no hay calificaciones
- PDMS QUERY CommandsDocumento2 páginasPDMS QUERY CommandsRahul PhadakeAún no hay calificaciones
- Annexure 1 To 3Documento1 páginaAnnexure 1 To 3Rahul PhadakeAún no hay calificaciones
- PDMS DRAFT Check ListDocumento2 páginasPDMS DRAFT Check ListRahul PhadakeAún no hay calificaciones
- Grand Marine and Infrastructure: Ship Building Industrial and CommercialDocumento1 páginaGrand Marine and Infrastructure: Ship Building Industrial and CommercialRahul PhadakeAún no hay calificaciones
- WELDINGDocumento4 páginasWELDINGRahul PhadakeAún no hay calificaciones
- An Introduction Into TeleScanDocumento2 páginasAn Introduction Into TeleScangheorghe2Aún no hay calificaciones
- QQDocumento1 páginaQQRahul PhadakeAún no hay calificaciones
- WELDINGDocumento4 páginasWELDINGRahul PhadakeAún no hay calificaciones
- Compressor Combustor DynamicsDocumento8 páginasCompressor Combustor DynamicsPartha_2610Aún no hay calificaciones
- Steel Plates, Strips, Sections and BarsDocumento1 páginaSteel Plates, Strips, Sections and BarsRahul PhadakeAún no hay calificaciones
- Vaibh Av: Resume For Amit KumarDocumento4 páginasVaibh Av: Resume For Amit KumarRahul PhadakeAún no hay calificaciones
- University of Mumbai: Girish Devidas PanditDocumento2 páginasUniversity of Mumbai: Girish Devidas PanditRahul PhadakeAún no hay calificaciones
- HD - CivilDocumento49 páginasHD - CivilRahul PhadakeAún no hay calificaciones
- Certificate PagesDocumento9 páginasCertificate PagesRahul PhadakeAún no hay calificaciones
- Apply Industry Project Master's Thesis Machine DesignDocumento2 páginasApply Industry Project Master's Thesis Machine DesignRahul PhadakeAún no hay calificaciones
- MiscDocumento5 páginasMiscRahul PhadakeAún no hay calificaciones
- Aaa 1Documento5 páginasAaa 1Rahul PhadakeAún no hay calificaciones
- The Column SectionDocumento1 páginaThe Column SectionRahul PhadakeAún no hay calificaciones
- Input OutputDocumento8 páginasInput OutputRahul PhadakeAún no hay calificaciones
- Contractor Welding Checkpoint Drawing ApprovalDocumento1 páginaContractor Welding Checkpoint Drawing ApprovalRahul PhadakeAún no hay calificaciones
- Section Modulus 012004Documento2 páginasSection Modulus 012004Sean MIAún no hay calificaciones
- CalculateDocumento2 páginasCalculateSriJish JishAún no hay calificaciones
- AnsiDocumento9 páginasAnsisajeerAún no hay calificaciones
- BASMDocumento18 páginasBASMRahul DubeyAún no hay calificaciones
- Technical CV - Gaurav KatreDocumento5 páginasTechnical CV - Gaurav KatreRahul PhadakeAún no hay calificaciones
- Run ShortcutsDocumento10 páginasRun ShortcutsRahul PhadakeAún no hay calificaciones
- ContentsDocumento8 páginasContentsRahul PhadakeAún no hay calificaciones
- Company Profile Pt. DutaflowDocumento62 páginasCompany Profile Pt. DutaflowRizkiRamadhanAún no hay calificaciones
- Semiconductive Shield Technologies in Power Distribution CablesDocumento6 páginasSemiconductive Shield Technologies in Power Distribution CablesA. HassanAún no hay calificaciones
- Basic Electronics PowerpointDocumento16 páginasBasic Electronics PowerpointEarle Sean MendozaAún no hay calificaciones
- Competency-Check-H e I ADocumento20 páginasCompetency-Check-H e I Abaldo yellow4Aún no hay calificaciones
- (Reprint From Handbuch Der Physik - Encyclopedia of Physics) R. N. Bracewell (Auth.) - Radio Astronomy Techniques-Springer-Verlag Berlin Heidelberg (1962)Documento91 páginas(Reprint From Handbuch Der Physik - Encyclopedia of Physics) R. N. Bracewell (Auth.) - Radio Astronomy Techniques-Springer-Verlag Berlin Heidelberg (1962)garfacio30Aún no hay calificaciones
- Singly Linked Lists AlgorithmDocumento18 páginasSingly Linked Lists AlgorithmGSX-R 1100Aún no hay calificaciones
- Static Analysis of VMC Spindle For Maximum Cutting Force: Mahesh M. Ghadage Prof. Anurag V. KarandeDocumento5 páginasStatic Analysis of VMC Spindle For Maximum Cutting Force: Mahesh M. Ghadage Prof. Anurag V. Karandefujy fujyAún no hay calificaciones
- Gfps 9182 Product Range PVC U en PDFDocumento568 páginasGfps 9182 Product Range PVC U en PDFjj bagzAún no hay calificaciones
- New Consultant List 20177 For Cea Website 10.02.2016Documento4 páginasNew Consultant List 20177 For Cea Website 10.02.2016hxian.y9333Aún no hay calificaciones
- Trouble ShootingDocumento3 páginasTrouble Shootingsami4330Aún no hay calificaciones
- Create Custom Pane Programmatically For Panels in Drupal 7Documento2 páginasCreate Custom Pane Programmatically For Panels in Drupal 7CoklatAún no hay calificaciones
- Secure ID PIN Generation - Guide: DisclaimerDocumento7 páginasSecure ID PIN Generation - Guide: DisclaimerSunitha RathnamAún no hay calificaciones
- TBR Wipro LeanDocumento8 páginasTBR Wipro LeanAnonymous fVnV07HAún no hay calificaciones
- Install bladder tanks under homesDocumento4 páginasInstall bladder tanks under homessauro100% (1)
- Xxxpol / 65° Az 17.3 / 17.0 / 17.3 Dbi: DiplexedDocumento2 páginasXxxpol / 65° Az 17.3 / 17.0 / 17.3 Dbi: DiplexedMahamoud HamoudAún no hay calificaciones
- Topic 3Documento25 páginasTopic 35p6zzgj4w9Aún no hay calificaciones
- Classification of Breast Cancer Histopathological ImagesDocumento20 páginasClassification of Breast Cancer Histopathological Imagesdolar singhAún no hay calificaciones
- AHU-Guideline 01 General Requirements Fo PDFDocumento24 páginasAHU-Guideline 01 General Requirements Fo PDFkayden chinAún no hay calificaciones
- Everyday Vocabulary Telephone TestDocumento3 páginasEveryday Vocabulary Telephone TestzdravkamajkicAún no hay calificaciones
- PMOS RunsheetDocumento3 páginasPMOS Runsheetkrishna_singhalAún no hay calificaciones
- 131179009679888042Documento7 páginas131179009679888042Ali AsgharAún no hay calificaciones
- Radiography 2 ProcedureDocumento9 páginasRadiography 2 ProceduresheikmoinAún no hay calificaciones
- CLC Blocks ProposolDocumento5 páginasCLC Blocks ProposolGyi TawAún no hay calificaciones
- Fatigue Strength in Laser Welding of The Lap Joint: S.-K. Cho, Y.-S. Yang, K.-J. Son, J.-Y. KimDocumento12 páginasFatigue Strength in Laser Welding of The Lap Joint: S.-K. Cho, Y.-S. Yang, K.-J. Son, J.-Y. KimbnidhalAún no hay calificaciones
- Robotics Answer KeyDocumento4 páginasRobotics Answer KeyChad ValenciaAún no hay calificaciones