También podría gustarte
- Alternative Classical MechanicsDocumento4 páginasAlternative Classical MechanicsAlejandro A. TorassaAún no hay calificaciones
- Seminar on Micro-Local Analysis. (AM-93), Volume 93De EverandSeminar on Micro-Local Analysis. (AM-93), Volume 93Aún no hay calificaciones
- PNG University of Technology Department of Applied Physics AP 274 Classical Mechanics: SyllabusDocumento11 páginasPNG University of Technology Department of Applied Physics AP 274 Classical Mechanics: SyllabusJoel DirinAún no hay calificaciones
- Gauge Theory and Variational PrinciplesDe EverandGauge Theory and Variational PrinciplesCalificación: 2 de 5 estrellas2/5 (1)
- Angular Momentum 1Documento29 páginasAngular Momentum 1Atif ImamAún no hay calificaciones
- Scattering Theory: Pure and Applied Mathematics, Vol. 26De EverandScattering Theory: Pure and Applied Mathematics, Vol. 26Aún no hay calificaciones
- Two-Body Problems With Drag or Thrust: Qualitative ResultsDocumento15 páginasTwo-Body Problems With Drag or Thrust: Qualitative Resultsrsanchez-Aún no hay calificaciones
- A Course of Mathematics for Engineers and Scientists: Volume 3: Theoretical MechanicsDe EverandA Course of Mathematics for Engineers and Scientists: Volume 3: Theoretical MechanicsCalificación: 1 de 5 estrellas1/5 (1)
- Itzhak Bars and Bora Orcal - Generalized Twistor Transform and Dualities With A New Description of Particles With Spin Beyond Free and MasslessDocumento33 páginasItzhak Bars and Bora Orcal - Generalized Twistor Transform and Dualities With A New Description of Particles With Spin Beyond Free and MasslessGum0000100% (1)
- Difference Equations in Normed Spaces: Stability and OscillationsDe EverandDifference Equations in Normed Spaces: Stability and OscillationsAún no hay calificaciones
- Mth-382 Analytical Dynamics: MSC MathematicsDocumento51 páginasMth-382 Analytical Dynamics: MSC MathematicsediealiAún no hay calificaciones
- Problems in Quantum Mechanics: Third EditionDe EverandProblems in Quantum Mechanics: Third EditionCalificación: 3 de 5 estrellas3/5 (2)
- I. Development of The Virial TheoremDocumento14 páginasI. Development of The Virial Theoremjohnsmith37758Aún no hay calificaciones
- Windri Suci Gaitari 17033170 Tugas06Documento30 páginasWindri Suci Gaitari 17033170 Tugas06Alidar AndestaAún no hay calificaciones
- Singularity Dynamics: Action and ReactionDocumento11 páginasSingularity Dynamics: Action and ReactionGeorgiana MaziluAún no hay calificaciones
- Classical Mechanics Notes (6 of 10)Documento18 páginasClassical Mechanics Notes (6 of 10)OmegaUserAún no hay calificaciones
- Physics Formulas and ConceptsDocumento23 páginasPhysics Formulas and ConceptsShivam TiwariAún no hay calificaciones
- MSC Maths Optional Paper VDocumento185 páginasMSC Maths Optional Paper VSaad KhanAún no hay calificaciones
- Lagrangian Mechanics - WikipediaDocumento38 páginasLagrangian Mechanics - WikipediaSoumyaranjan HarichandanAún no hay calificaciones
- Dynamical Systems: R.S. ThorneDocumento13 páginasDynamical Systems: R.S. Thornezcapg17Aún no hay calificaciones
- Analysis of Flexible Multibody Systems With Spatial Beams Using Mixed Variational PrinciplesDocumento20 páginasAnalysis of Flexible Multibody Systems With Spatial Beams Using Mixed Variational PrinciplesnevinkoshyAún no hay calificaciones
- Rotational Motion 3: Physics 53Documento10 páginasRotational Motion 3: Physics 53Kriti SrivastavaAún no hay calificaciones
- Angular MomentumDocumento6 páginasAngular Momentumprakush_prakushAún no hay calificaciones
- Inertial Frame of ReferenceDocumento2 páginasInertial Frame of ReferenceAshpreet SalujaAún no hay calificaciones
- Lagrange Equation 1Documento32 páginasLagrange Equation 1Gthulasi78Aún no hay calificaciones
- Cosserat ForestDocumento20 páginasCosserat ForestRodrigo Peluci de FigueiredoAún no hay calificaciones
- Lecture # 1 (PC-1) PDFDocumento20 páginasLecture # 1 (PC-1) PDFShreyanshJainAún no hay calificaciones
- Triple LinkageDocumento13 páginasTriple Linkagepalerm00Aún no hay calificaciones
- Simple Mass Spring SystemDocumento11 páginasSimple Mass Spring SystemArindam MondalAún no hay calificaciones
- Configuration Equilibrium Perturbation InfinitesimalDocumento10 páginasConfiguration Equilibrium Perturbation InfinitesimalAndrea ŠkarićAún no hay calificaciones
- Goldstein Classical Mechanics Notes (Michael Good 2004)Documento149 páginasGoldstein Classical Mechanics Notes (Michael Good 2004)Karan Gupta100% (1)
- 16 - Central Force Motion PDFDocumento21 páginas16 - Central Force Motion PDFUltrazordAún no hay calificaciones
- M. P. Hertzberg, S. V. Vladimirov and N. F. Cramer - Rotational Modes of Oscillation of Rodlike Dust Grains in A PlasmaDocumento9 páginasM. P. Hertzberg, S. V. Vladimirov and N. F. Cramer - Rotational Modes of Oscillation of Rodlike Dust Grains in A PlasmaDeez34PAún no hay calificaciones
- Chapter 08Documento47 páginasChapter 08Veranur FatimahAún no hay calificaciones
- PhononDocumento9 páginasPhononChristopher BrownAún no hay calificaciones
- Two Body, Central-Force ProblemDocumento15 páginasTwo Body, Central-Force ProblemAvnish GargAún no hay calificaciones
- Goldstein Classical Mechanics Notes: 1 Chapter 1: Elementary PrinciplesDocumento149 páginasGoldstein Classical Mechanics Notes: 1 Chapter 1: Elementary PrinciplesPavan KumarAún no hay calificaciones
- A Closed Form Solution of The Two Body Problem in Non-Inertial Reference FramesDocumento20 páginasA Closed Form Solution of The Two Body Problem in Non-Inertial Reference Framesshakir hussainAún no hay calificaciones
- Physics Formulas and ConceptsDocumento23 páginasPhysics Formulas and Conceptschand7790Aún no hay calificaciones
- 2004 Engineers Australia Journals VD PaperDocumento11 páginas2004 Engineers Australia Journals VD PaperPhương TrầnAún no hay calificaciones
- A N Gorban-Model Reduction and Coarse-Graining Approaches For Multiscale Phenomena-Springer2006 365 371Documento7 páginasA N Gorban-Model Reduction and Coarse-Graining Approaches For Multiscale Phenomena-Springer2006 365 371Dana MAún no hay calificaciones
- Kuramoto 1984Documento18 páginasKuramoto 1984Lambu CarmelAún no hay calificaciones
- MD BasicsDocumento27 páginasMD BasicsRajneesh PerhateAún no hay calificaciones
- 1 Classical MechanicsDocumento11 páginas1 Classical MechanicsJayant MukherjeeAún no hay calificaciones
- What Is Molecular Dynamics?Documento26 páginasWhat Is Molecular Dynamics?Ibrahim HasanAún no hay calificaciones
- Report - Cu Cas 97 09Documento16 páginasReport - Cu Cas 97 09Doug JenkinsAún no hay calificaciones
- 5 WDDocumento7 páginas5 WDMuhammed MinhajAún no hay calificaciones
- Classical MechanicsDocumento16 páginasClassical MechanicsshivanandAún no hay calificaciones
- TLS - XI - Physics - System of Particle - Rotational MotionDocumento9 páginasTLS - XI - Physics - System of Particle - Rotational Motionaniruddha deshpandeAún no hay calificaciones
- 1 - Intro and Rectilinear Motion With ProblemsDocumento29 páginas1 - Intro and Rectilinear Motion With ProblemsSuhaib IntezarAún no hay calificaciones
- Unit-1&2 Engineering MechanicsDocumento15 páginasUnit-1&2 Engineering MechanicsVaidyanathan RamakrishnanAún no hay calificaciones
- Physics For Scientists and Engineers Chapter 01Documento42 páginasPhysics For Scientists and Engineers Chapter 01topwarmachineAún no hay calificaciones
- Sliding On The Inside of A Conical Surface: R. L Opez-Ruiz and A. F. PachecoDocumento26 páginasSliding On The Inside of A Conical Surface: R. L Opez-Ruiz and A. F. PachecoSubhankar HowladerAún no hay calificaciones
- Applications of Symmetry and Group Theory (Artigo)Documento22 páginasApplications of Symmetry and Group Theory (Artigo)MoahVieiraAún no hay calificaciones
- ViBrasi InmanDocumento67 páginasViBrasi InmanAnonymous RJtBkn100% (1)
- Dynamics of System of ParticlesDocumento16 páginasDynamics of System of ParticlesHarishAún no hay calificaciones
- MekanikaDocumento17 páginasMekanikaelvyAún no hay calificaciones
- The Density OperatorDocumento42 páginasThe Density OperatorShweta SridharAún no hay calificaciones
- Chapter 10Documento11 páginasChapter 10f_dkAún no hay calificaciones
- Physics XIDocumento24 páginasPhysics XIPavithra PrakashAún no hay calificaciones
- November2016 Physics Paper 2 HL MarkschemeDocumento27 páginasNovember2016 Physics Paper 2 HL MarkschemeAnanya AggarwalAún no hay calificaciones
- Student Exploration: Fan Cart Physics (Answer Key)Documento4 páginasStudent Exploration: Fan Cart Physics (Answer Key)JoonSmith45% (22)
- Investigating MomentumDocumento27 páginasInvestigating MomentumEric Doroja Mabesa83% (6)
- Chapter 1 Physical Quantities and Units RevisionDocumento7 páginasChapter 1 Physical Quantities and Units RevisionChinee ChokAún no hay calificaciones
- Lecture 1 Statics. Basic Concepts and AxiomsDocumento38 páginasLecture 1 Statics. Basic Concepts and AxiomsДана Қарасайқызы100% (1)
- 04 Forces Tutorial SolutionsDocumento9 páginas04 Forces Tutorial SolutionsMe4d SHiV23Aún no hay calificaciones
- Audels Engineers and Mechanics Guide Volume 1 From WWW Jgokey ComDocumento486 páginasAudels Engineers and Mechanics Guide Volume 1 From WWW Jgokey Comjdsa123100% (2)
- Stargate CIA-RDP96-00787R000100030001-9Documento9 páginasStargate CIA-RDP96-00787R000100030001-9taabenaAún no hay calificaciones
- Mechanical Engineering NotesDocumento216 páginasMechanical Engineering NotesvelavansuAún no hay calificaciones
- Connor Stengel - PotentialEnergyShelvesSEDocumento4 páginasConnor Stengel - PotentialEnergyShelvesSEConnor StengelAún no hay calificaciones
- 21-Ans A 658 N B 101 N 8 A Block of Mass M 200 KG Is Attached To A Spring of ForceDocumento4 páginas21-Ans A 658 N B 101 N 8 A Block of Mass M 200 KG Is Attached To A Spring of Forcejuancho1239346Aún no hay calificaciones
- A Physicist's Guide To Skepticisim - Milton A. RothmanDocumento734 páginasA Physicist's Guide To Skepticisim - Milton A. Rothmankylenilsen100% (1)
- The Relationship of Air Density and Electromagnetic RadiationDocumento6 páginasThe Relationship of Air Density and Electromagnetic RadiationLorraineLaine0% (1)
- MDV RelayDocumento4 páginasMDV RelayDaniel DubeAún no hay calificaciones
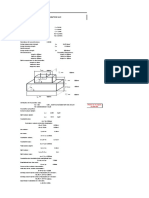
- Foundation Vent: X y Z X yDocumento12 páginasFoundation Vent: X y Z X yLumy NastaseAún no hay calificaciones
- Practica N°1 - Graficas y ExuacionesDocumento19 páginasPractica N°1 - Graficas y ExuacionesLopez Pedro100% (1)
- Born - Natural Philosophy of Cause and Chance (1948)Documento236 páginasBorn - Natural Philosophy of Cause and Chance (1948)Joel Rasch100% (1)
- FY4 IB 2017 WithcircularDocumento15 páginasFY4 IB 2017 WithcircularTrương Quốc HuyAún no hay calificaciones
- Pages From Chapter 17-13Documento10 páginasPages From Chapter 17-13taAún no hay calificaciones
- F3 Chapter 7 Energy and PowerDocumento6 páginasF3 Chapter 7 Energy and Poweramniraze bin hamzahAún no hay calificaciones
- Projectile Motion - Mathematics IA: Defining SymbolsDocumento13 páginasProjectile Motion - Mathematics IA: Defining SymbolsShubAún no hay calificaciones
- Faraday's LawDocumento7 páginasFaraday's Lawlemuel mabilinAún no hay calificaciones
- Color and Strength of Chromatic Pigments With A Mechanical MullerDocumento5 páginasColor and Strength of Chromatic Pigments With A Mechanical MullerDeepak D MishraAún no hay calificaciones
- G481 Module 2 Forces in Action QuestionsDocumento13 páginasG481 Module 2 Forces in Action QuestionsMahesh TammineniAún no hay calificaciones
- PeKe RevisionmidtopicDocumento4 páginasPeKe RevisionmidtopiccAún no hay calificaciones
- Glencoe Science - Motion, Forces, and Energy - Science NotebookDocumento80 páginasGlencoe Science - Motion, Forces, and Energy - Science Notebooklyfelearner100% (2)
- Experiment #6: Ma - Victoria V. Abigpa Mr. Hiromi Rivas Bs Psychology 2-A JUNE 12, 2021Documento5 páginasExperiment #6: Ma - Victoria V. Abigpa Mr. Hiromi Rivas Bs Psychology 2-A JUNE 12, 2021Alli MariaAún no hay calificaciones
- Lab Report##3Documento5 páginasLab Report##3Shaffaq ZamanAún no hay calificaciones
- GCSC Physics GlossaryDocumento8 páginasGCSC Physics GlossarysmeenaAún no hay calificaciones
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldDe EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldCalificación: 3.5 de 5 estrellas3.5/5 (64)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceDe EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceCalificación: 4 de 5 estrellas4/5 (51)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseDe EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseCalificación: 3.5 de 5 estrellas3.5/5 (69)
- Lost in Math: How Beauty Leads Physics AstrayDe EverandLost in Math: How Beauty Leads Physics AstrayCalificación: 4.5 de 5 estrellas4.5/5 (125)
- A Brief History of Time: From the Big Bang to Black HolesDe EverandA Brief History of Time: From the Big Bang to Black HolesCalificación: 4 de 5 estrellas4/5 (2193)
- Bedeviled: A Shadow History of Demons in ScienceDe EverandBedeviled: A Shadow History of Demons in ScienceCalificación: 5 de 5 estrellas5/5 (5)
- Summary and Interpretation of Reality TransurfingDe EverandSummary and Interpretation of Reality TransurfingCalificación: 5 de 5 estrellas5/5 (5)
- The Beauty of Falling: A Life in Pursuit of GravityDe EverandThe Beauty of Falling: A Life in Pursuit of GravityAún no hay calificaciones
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldDe EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldCalificación: 4.5 de 5 estrellas4.5/5 (54)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessDe EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessCalificación: 4 de 5 estrellas4/5 (6)
- Giza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyDe EverandGiza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyAún no hay calificaciones
- Higgs Discovery: The Power of Empty SpaceDe EverandHiggs Discovery: The Power of Empty SpaceCalificación: 3 de 5 estrellas3/5 (30)
- Packing for Mars: The Curious Science of Life in the VoidDe EverandPacking for Mars: The Curious Science of Life in the VoidCalificación: 4 de 5 estrellas4/5 (1396)
- The Beginning of Infinity: Explanations That Transform the WorldDe EverandThe Beginning of Infinity: Explanations That Transform the WorldCalificación: 5 de 5 estrellas5/5 (60)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterDe EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterCalificación: 4.5 de 5 estrellas4.5/5 (410)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeDe EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeCalificación: 4.5 de 5 estrellas4.5/5 (3)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeDe EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeAún no hay calificaciones
- The Holographic Universe: The Revolutionary Theory of RealityDe EverandThe Holographic Universe: The Revolutionary Theory of RealityCalificación: 4.5 de 5 estrellas4.5/5 (77)
- The End of Everything: (Astrophysically Speaking)De EverandThe End of Everything: (Astrophysically Speaking)Calificación: 4.5 de 5 estrellas4.5/5 (157)
- Beyond Weird: Why Everything You Thought You Knew about Quantum Physics Is DifferentDe EverandBeyond Weird: Why Everything You Thought You Knew about Quantum Physics Is DifferentCalificación: 4 de 5 estrellas4/5 (25)
- Let There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessDe EverandLet There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessCalificación: 4.5 de 5 estrellas4.5/5 (57)
- A Natural History of Color: The Science Behind What We See and How We See itDe EverandA Natural History of Color: The Science Behind What We See and How We See itCalificación: 4 de 5 estrellas4/5 (13)
- The Reality Revolution: The Mind-Blowing Movement to Hack Your RealityDe EverandThe Reality Revolution: The Mind-Blowing Movement to Hack Your RealityCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Vibration and Frequency: How to Get What You Want in LifeDe EverandVibration and Frequency: How to Get What You Want in LifeCalificación: 4.5 de 5 estrellas4.5/5 (13)
- Quantum Physics: What Everyone Needs to KnowDe EverandQuantum Physics: What Everyone Needs to KnowCalificación: 4.5 de 5 estrellas4.5/5 (49)