También podría gustarte
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- 33 11KV Substation SLDDocumento3 páginas33 11KV Substation SLDRajeshYadav100% (1)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- Kris Gethin Muscle Building - Nutrition OverviewDocumento8 páginasKris Gethin Muscle Building - Nutrition OverviewLuisLopezAún no hay calificaciones
- Official MEW 2018Documento48 páginasOfficial MEW 2018Khizer100% (1)
- Instructions: MOTOMAN-EA1400Documento62 páginasInstructions: MOTOMAN-EA1400Mrutunjay RaipureAún no hay calificaciones
- Ch-5 Sheet Metal OperationDocumento20 páginasCh-5 Sheet Metal OperationJAYANT KUMARAún no hay calificaciones
- Igcse Economic Activity Revision PackDocumento24 páginasIgcse Economic Activity Revision Packapi-232441790100% (2)
- Damage Control BookDocumento88 páginasDamage Control BookMiguel RatonAún no hay calificaciones
- Motor Logic™ Solid-State Overload Relays (SSOLRS) : Other FeaturesDocumento4 páginasMotor Logic™ Solid-State Overload Relays (SSOLRS) : Other FeaturesSantiago BorjaAún no hay calificaciones
- Liu JCP2019 Data Driven Intelligent Location Public Charging StationsDocumento11 páginasLiu JCP2019 Data Driven Intelligent Location Public Charging StationsRodrigoAún no hay calificaciones
- Trane Parts Catalogue 2015Documento202 páginasTrane Parts Catalogue 2015Said ZubizaAún no hay calificaciones
- Hypercell 1994 Engl by Hans HassDocumento126 páginasHypercell 1994 Engl by Hans HassClaimDestinyAún no hay calificaciones
- LevyDocumento4 páginasLevyRamon FerreiraAún no hay calificaciones
- Effectiveness of Sootblowers in Boilers Thermal Power StationDocumento7 páginasEffectiveness of Sootblowers in Boilers Thermal Power Stationdillipsh123Aún no hay calificaciones
- HexaneDocumento3 páginasHexaneIan RidzuanAún no hay calificaciones
- Heat Exchangers of PolypropyleneDocumento2 páginasHeat Exchangers of PolypropyleneTan So100% (1)
- Bridge Rectifier - Definition, Construction and WorkingDocumento14 páginasBridge Rectifier - Definition, Construction and WorkingRamKumarAún no hay calificaciones
- Atomic Nucleus Facts and ConceptsDocumento24 páginasAtomic Nucleus Facts and ConceptsKashyap PatelAún no hay calificaciones
- Transient Stability Improvement of Power System Using UpfcDocumento18 páginasTransient Stability Improvement of Power System Using UpfcMuhammadWaqarAún no hay calificaciones
- Agenda Dynamics and Policy Subsystems Baumgartner1991Documento32 páginasAgenda Dynamics and Policy Subsystems Baumgartner1991Gustavo Decap AgüeroAún no hay calificaciones
- Reading Comprehension EnviromentDocumento5 páginasReading Comprehension Enviromentandreapichoni100% (1)
- Siemens SSA31.04 PDFDocumento6 páginasSiemens SSA31.04 PDFJohn DunbarAún no hay calificaciones
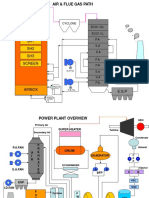
- Air & Flue Gas Path CFBCDocumento2 páginasAir & Flue Gas Path CFBCJAY PARIKHAún no hay calificaciones
- 3 Goshu 3Documento18 páginas3 Goshu 3nega cheruAún no hay calificaciones
- Performance Evaluation of An Oil Fired Boiler A Case Study in Dairy Industry.Documento8 páginasPerformance Evaluation of An Oil Fired Boiler A Case Study in Dairy Industry.atul100% (8)
- Bài Tập Đọc Hiểu Tiếng Anh Lớp 9 HKIIDocumento4 páginasBài Tập Đọc Hiểu Tiếng Anh Lớp 9 HKIIPhương Thu Vũ ThịAún no hay calificaciones
- Bottom-Up Cost Evaluation of SOEC Systems (10-100MW)Documento14 páginasBottom-Up Cost Evaluation of SOEC Systems (10-100MW)Roy JudeAún no hay calificaciones
- Technical Specification TREO CF I48CA1Documento1 páginaTechnical Specification TREO CF I48CA1Razvan CorciuAún no hay calificaciones
- SMC1500-2U: Product Data SheetDocumento3 páginasSMC1500-2U: Product Data SheetRedes ItcAún no hay calificaciones
- Catalase TestDocumento2 páginasCatalase TestsekaralingamAún no hay calificaciones
- I2N65 Series: N-Channel Power MOSFET 12A, 650volts DescriptionDocumento7 páginasI2N65 Series: N-Channel Power MOSFET 12A, 650volts DescriptionMariusAún no hay calificaciones