También podría gustarte
- BIBLIOGRAFÍA TÉCNICA Desarrollo de Aplicaciones para Android Usando MIT App Inventor 2 PDFDocumento102 páginasBIBLIOGRAFÍA TÉCNICA Desarrollo de Aplicaciones para Android Usando MIT App Inventor 2 PDFRonald Poblete MuñozAún no hay calificaciones
- Manual App Inventor PDFDocumento44 páginasManual App Inventor PDFElvys EmersonAún no hay calificaciones
- Libro Simulacion MikrocDocumento289 páginasLibro Simulacion MikrocIsmael100% (10)
- 10 Operador A Nivel de BitsDocumento12 páginas10 Operador A Nivel de BitsAlexander Castro MendozaAún no hay calificaciones
- Video 32 Dibujar Un TriánguloDocumento2 páginasVideo 32 Dibujar Un TriánguloAlexander Castro MendozaAún no hay calificaciones
- Video 33 Dibujar Polígono de Cuatro LadosDocumento3 páginasVideo 33 Dibujar Polígono de Cuatro LadosAlexander Castro MendozaAún no hay calificaciones
- Video 34 Dibuja Un RectánguloDocumento8 páginasVideo 34 Dibuja Un RectánguloAlexander Castro MendozaAún no hay calificaciones
- Video 31 Dibujar Una LíneaDocumento2 páginasVideo 31 Dibujar Una LíneaAlexander Castro MendozaAún no hay calificaciones
- Enconado de Parlantes y Construccion de Bafles Parte 1Documento0 páginasEnconado de Parlantes y Construccion de Bafles Parte 1Alexander Castro MendozaAún no hay calificaciones
- Doble 18Documento1 páginaDoble 18Alexander Castro MendozaAún no hay calificaciones
- Gabinete Sub Bajo 15Documento1 páginaGabinete Sub Bajo 15Alexander Castro MendozaAún no hay calificaciones
- Enconado de Bocinas Yconstnde BafflesDocumento9 páginasEnconado de Bocinas Yconstnde BafflesWmaster WarezAún no hay calificaciones
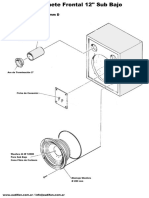
- Gabinete 12 Sub BajoDocumento1 páginaGabinete 12 Sub BajoHomero Ruiz HernandezAún no hay calificaciones
- Manipulación Directa de Puertos. Usando Los Puertos Digitales. (25-10-2011) PDFDocumento5 páginasManipulación Directa de Puertos. Usando Los Puertos Digitales. (25-10-2011) PDFManuel RamosAún no hay calificaciones
- Configuración y uso de parlantes en sistemas de sonidoDocumento0 páginasConfiguración y uso de parlantes en sistemas de sonidoAlexander Castro MendozaAún no hay calificaciones
- Para Disenar Cajas Ataticas o Bafles (Impreso)Documento4 páginasPara Disenar Cajas Ataticas o Bafles (Impreso)Alexander Castro MendozaAún no hay calificaciones
- Redes y Medios de Transmision PDFDocumento2 páginasRedes y Medios de Transmision PDFAlexander Castro MendozaAún no hay calificaciones
- SertralinaDocumento3 páginasSertralinaAlexander Castro MendozaAún no hay calificaciones
- Conexión de ParlantesDocumento9 páginasConexión de ParlantesAlexander Castro MendozaAún no hay calificaciones
- Conexión de ParlantesDocumento9 páginasConexión de ParlantesAlexander Castro MendozaAún no hay calificaciones
- Controllino - Controllino MINIDocumento2 páginasControllino - Controllino MINIAlexander Castro MendozaAún no hay calificaciones
- Lineamientos - Tutor AvaDocumento2 páginasLineamientos - Tutor AvaAlexander Castro MendozaAún no hay calificaciones
- Prueba Tutores CTCM PDFDocumento4 páginasPrueba Tutores CTCM PDFAlexander Castro MendozaAún no hay calificaciones
- El Parlante de Bobina MóvilDocumento3 páginasEl Parlante de Bobina MóvilAlexander Castro MendozaAún no hay calificaciones
- ELECTRICIDAD INDUSTRIAL - Manuales y Diagramas PDFDocumento78 páginasELECTRICIDAD INDUSTRIAL - Manuales y Diagramas PDFLuis Rodriguez Dunn100% (3)
- Redes y SeguridadDocumento2 páginasRedes y SeguridadNeider PinedaAún no hay calificaciones
- Alprazolam PDFDocumento4 páginasAlprazolam PDFAlexander Castro MendozaAún no hay calificaciones
- La Letra FDocumento6 páginasLa Letra FAlexander Castro MendozaAún no hay calificaciones
- Aceites - Esenciales - Extraccion - Uso - Aplicaciones PDFDocumento2 páginasAceites - Esenciales - Extraccion - Uso - Aplicaciones PDFAlexander Castro Mendoza100% (1)
- Analisis Desarrollo Movil App InventorDocumento4 páginasAnalisis Desarrollo Movil App InventorOscar J Mo100% (1)
- EXAMEN DE QUÍMICA GENERAL DEL IPN SOBRE EQUILIBRIO QUÍMICO Y ÁCIDOS-BASESDocumento1 páginaEXAMEN DE QUÍMICA GENERAL DEL IPN SOBRE EQUILIBRIO QUÍMICO Y ÁCIDOS-BASESRebeca Pérez PAún no hay calificaciones
- Manual de Zoologia (Autoguardado) 2017 (Autoguardado)Documento230 páginasManual de Zoologia (Autoguardado) 2017 (Autoguardado)Felix RiveraAún no hay calificaciones
- Metabolismo en Las PlantasDocumento9 páginasMetabolismo en Las PlantasJoan M Marroco GAún no hay calificaciones
- Limpieza y Desinfeccin en Industria Alimentaria 1205758249701516 4Documento176 páginasLimpieza y Desinfeccin en Industria Alimentaria 1205758249701516 4sej1980100% (3)
- Anhídrido FtálicoDocumento4 páginasAnhídrido FtálicoclarysbriAún no hay calificaciones
- Diversidad de Especies Bio MarinaDocumento32 páginasDiversidad de Especies Bio MarinaMariciell Larissa Gonzales TiconaAún no hay calificaciones
- La Tierra y Su AlrededoresDocumento11 páginasLa Tierra y Su AlrededoresLuis SiuLAún no hay calificaciones
- HPLC GeneralidadesDocumento8 páginasHPLC GeneralidadesJonathan Correa OsorioAún no hay calificaciones
- COLIMETRÍADocumento3 páginasCOLIMETRÍAJhasmin LajoAún no hay calificaciones
- Química Orgánica: Estructuras de Lewis, carga formal e isómerosDocumento6 páginasQuímica Orgánica: Estructuras de Lewis, carga formal e isómerosstefanny ManriqueAún no hay calificaciones
- Cuadro Agente ToxicoDocumento4 páginasCuadro Agente ToxicoYenny GarciaAún no hay calificaciones
- FluorDocumento11 páginasFluorfeyer mamianAún no hay calificaciones
- Reporte No. 14 Destilación de Una Mezcla Metanol-AguaDocumento7 páginasReporte No. 14 Destilación de Una Mezcla Metanol-AguaSaúl Bernal100% (1)
- BEC extracción petróleo electrocentrífugoDocumento15 páginasBEC extracción petróleo electrocentrífugodiegoAún no hay calificaciones
- Tuberia PPR Faser RP sdr74Documento2 páginasTuberia PPR Faser RP sdr74Salvador GonzalezAún no hay calificaciones
- Universidad Nacional Del Centro Del Perú 1Documento4 páginasUniversidad Nacional Del Centro Del Perú 1Ronaldo OrihuelaAún no hay calificaciones
- Triaxial EjerciciossDocumento15 páginasTriaxial EjerciciossSantiago Medina OrtizAún no hay calificaciones
- Compuestos Reforzados Por ParticulasDocumento3 páginasCompuestos Reforzados Por ParticulasAndres AlexsanderAún no hay calificaciones
- CampecheDocumento36 páginasCampecheac68100% (1)
- Nociones Básicas de Calefacción Calderas 1Documento98 páginasNociones Básicas de Calefacción Calderas 1Gero1941Aún no hay calificaciones
- UnaDocumento3 páginasUnahortenciaAún no hay calificaciones
- Manual de prevención de corrosión por erosión en tuberías y válvulasDocumento14 páginasManual de prevención de corrosión por erosión en tuberías y válvulasRick AponteAún no hay calificaciones
- Instalar Un Sistema de Aire Acondicionado Split Paso A Paso Prelim in Ares PARA INSTALARDocumento13 páginasInstalar Un Sistema de Aire Acondicionado Split Paso A Paso Prelim in Ares PARA INSTALARHARRISON_OHMAún no hay calificaciones
- Tomo IIIDocumento24 páginasTomo IIIPaula Alejandra Major Campos100% (1)
- Absorción de FármacosDocumento17 páginasAbsorción de FármacosAxel ColmeneroAún no hay calificaciones
- Práctica BromatosDocumento1 páginaPráctica BromatosKatia LeonelaAún no hay calificaciones
- LB Molienda y TamizadoDocumento15 páginasLB Molienda y TamizadofrpatriciaAún no hay calificaciones
- Producción de Gel DesinfectanteDocumento18 páginasProducción de Gel DesinfectanteBloo RamírezAún no hay calificaciones
- IONICODocumento2 páginasIONICOangela martinezAún no hay calificaciones
- Guia Reacciones RedoxDocumento5 páginasGuia Reacciones RedoxdanielaAún no hay calificaciones