Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Practica 3
Cargado por
Felipe MendietaDerechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Practica 3
Cargado por
Felipe MendietaCopyright:
Formatos disponibles
Universidad Nacional de Colombia, Informe de Control, Noviembre 7 de 2013
1
ResumenPara el desarrollo de esta prctica se hizo la
simulacin y se implementaron controles de tipo ON / OFF y
proporcional en el motor LEGO, teniendo en cuenta los
resultados obtenidos experimentalmente con la teora y las
simulaciones ajustando los parmetros para obtener tiempos de
estabilizacin y valores de error deseados en los diferentes tipos
de ejercicios propuestos en la gua.
Palabras clavesRealimentacin, Lazo abierto y lazo cerrado,
inestabilidad, tiempo de estabilizacin, error, funcin de
transferencia, valor de estado estacionario.
I. OBJETIVOS
Simular en Simulink la respuesta terica de un
control de posicin mediante control ON/OFF,
implementar el control ON/OFF de posicin en el
Brix y comparar los resultados obtenidos.
Conocer dos tipos de control con los cuales se puede
obtener estabilidad mediante una realimentacin en
lazo cerrado
Disear, simular e implementar un sistema de control
proporcional para velocidad y control del motor
LEGO
II. INTRODUCCIN
Los sistemas de control han sido un tema de amplio estudio
desde pocas remotas, sin embargo en las ultimas dedadas
gracias a los desarrollos tecnolgicos en informtica y
procesamiento de datos, se ha comenzado a mejorar las
estrategias para la implementacin de dichos sistemas,
logrando as llevar a cabo procesos cada vez de mayor
precisin y exactitud en tiempos especficos, que se adecuan a
las necesidades industriales principalmente con el fin de
optimizar y mejorar procesos. Por lo anterior es de gran
importancia que desde el mbito educativo se lleve a cabo una
articulacin apropiada desde los conceptos y fundamentos
bsicos del control de sistemas, conociendo as la forma de
analizar su respuesta y comportamiento dependiendo de
distintos parmetro, hasta la implementacin y asistencia de
software para el modelamiento y diseo de estos.
Todo esto comienza con un proceso de familiarizacin que
con la caracterizacin de un sistema cuyos datos han sido
previamente adquiridos mediante la teora de sistemas de
primer y segundo orden y Matlab como herramienta de
anlisis y verificacin. Posteriormente una vez se ha
comprendido los fundamentos de este proceso, se procede a
realizar la caracterizacin de un motor DC perteneciente a un
sistema lego Mindstorms obteniendo como resultado un
modelo que representa el comportamiento de este tipo de
motor. Finalmente se exploran los fundamentos fsicos del
funcionamiento de un motor AC y cmo estos parmetros se
ven traducidos en los modelos matemticos completos que
describen el sistema. Estos modelos son luego simplificados
para efectos del control del mismo y se analiza la influencia de
sus parmetros en la respuesta del sistema.
III. PROCEDIMIENTO
1. Control ON/OFF del motor LEGO
1.1 Disee y simule un sistema de control ON/OFF de
posicin del motor LEGO:
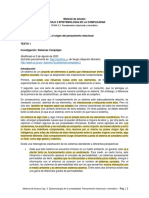
Se realiz el control ON/OFF en Simulink como se muestra
en la figura 1:
Figura 1. Diagrama de bloques control ON/OFF
En la cual se observa que la seal de entrada paso ingresa a
una funcin de matlab llamada fcn, la cual presenta dos
entradas que son Ref correspondiente a la entrada paso y la
seal y correspondiente a la salida del sistema realimentada.
La funcin fcn es creada en matlab y se presenta con mayor
detalle a continuacin:
Laboratorio 3: Control ON/OFF y Control
Proporcional
Daz Andrs, Gmez Freddy, Sarmiento Camilo
Cd.261920, Cd 261711, Cd.223512
Bogot, Colombia
Universidad Nacional de Colombia, Informe de Control, Noviembre 7 de 2013
2
La cual presenta la definicin del control ON/OFF el cual est
definido como:
{
En el cdigo de matlab, se define el
est definido como
el valor mximo de velocidad hacia la derecha, cuando se
presenta un error positivo indicando que la salida es menor
que la referencia, la velocidad debe aumentar para avanzar y
alcanzar el valor de posicin de referencia, mientras que el
se encuentra definido como el valor mximo de velocidad
hacia la izquierda (reversa), cuando el error es menor que
cero, indicando que la salida posee un valor mayor a la
referencia de entrada el motor gira el sentido contrario
devolvindose y tomando el valor de posicin que se tiene por
referencia.
Siguiendo con la explicacin del control ON/OFF
implementado en simulink, encontramos un sumador que
permite la realimentacin de la salida al sistema, con lo cual se
produce estabilidad en el sistema. Seguido a este encontramos
el bloque correspondiente al motor, en el cual encontramos la
funcin de transferencia que describe el comportamiento de la
velocidad del motor, la cual fue hallada en la prctica anterior
y est definida como:
()
Finalmente encontramos un integrador, el cual permite obtener
una aproximacin de la posicin del motor en base a los
valores de velocidad obtenidos por medio de la funcin de
transferencia hallada en la prctica anterior. Se utiliza un
multiplexor que permita observar las seales tanto de entrada
como la salida del sistema por medio de un osciloscopio, la
cual se muestra en la figura 2.
Figura 2. Seal de salida del sistema,
Adicionalmente se presenta la seal de salida de la funcin
fcn, la cual corresponde a la seal de control en la figura 3.
Figura 3. Accin del controlador.
1.2 Analizar el error permanente, el esfuerzo de control y el
tiempo de estabilizacin en el lazo de control.
Se encuentra en la seal de salida del sistema mostrada
en la figura 2 una estabilizacin de este, el cual se
produce alrededor de los 0.4 segundos aunque el sistema
sigue con pequeas oscilaciones causadas por el error
permanente, las cuales para simplificar se tomarn
estables obtenindose un valor de salida de estado
estacionario. Adicionalmente se observa la accin del
controlador, el cual cuando el error es positivo enva una
seal que desplace el motor en sentido positivo, mientras
para el caso contrario la seal de salida del controlador
toma valor negativo para desplazar el motor en sentido
contrario y lograr as obtener el valor de posicin deseado
de la seal de salida del sistema, observndose as el
esfuerzo que realiza el controlador para garantizar la
estabilidad del sistema definido por una seal variante
entre 100 y -100, definiendo as el sentido de rotacin del
motor.
.
1.3 Implementar el sistema de control ON/OFF de
posicin en el Bricx, utilizando como base para la
implementacin el archivo controlpos.nxc, modificando el
cdigo para que se almacene la variable controlada (posicin),
la referencia o setpoint del sistema y la seal de control
(porcentaje de voltaje aplicado al motor LEGO).
Universidad Nacional de Colombia, Informe de Control, Noviembre 7 de 2013
3
Con base en el archivo controlpos.nxc se procede la
implementacin del sistema de control de posicin en el
Brick, por medio del siguiente algoritmo:
byte fileHandle;
string s,c,er;
short bytesWritten; // declaracin de variables
string write;
task main(){
DeleteFile("datos.txt"); // creacin del archivo txt
CreateFile("datos.txt", 2000, fileHandle);
while(!ButtonPressed(BTNCENTER, false)){
posicion = MotorRotationCount(OUT_A);
TextOut(0, LCD_LINE2, StrCat("Posicin: ",NumToStr(posicion)));
TextOut(0, LCD_LINE1, StrCat("Setpoint:",NumToStr(Ref)));
e = Ref-posicion; //algoritmo de control
if (e>0){
senalControl = 100;
OnFwd (OUT_A,senalControl);
}
else {
senalControl = -100;
OnFwd (OUT_A,senalControl);
}
// Fin del Algoritmo
s = NumToStr(posicion); // almacenamiento en el txt
c = NumToStr(senalControl);
er = NumToStr(e);
write = StrCat(s,",",c,",",er);
WriteLnString(fileHandle,write, bytesWritten);
Wait(7);
ClearScreen();
}
CloseFile(fileHandle);
}
Analizando el cdigo utilizado en el Brick, se utiliza una
seal de control la cual define la velocidad y el sentido de
rotacin del motor, tomando valores de 100 -100,
indicando as que cuando el error sea positivo se indica
que la posicin est atrasada del valor de referencia y se
indica mover el motor hacia adelante a la mxima
velocidad, en caso contrario que el error sea negativo
indica que la posicin est adelantada con respecto al
valor de referencia y se indica al motor que se mueva
hacia atrs a la mxima velocidad. Aplicando la mxima
velocidad obtenemos un tiempo de respuesta menor.
1.4 Comparar en Simulink la seal de control y la variable
controlada del sistema de control ON/OFF de la
simulacin frente a los datos experimentales
almacenados:
Como se analiz en la implementacin del cdigo de control
en el Brick, el motor realiza acciones de avance y retroceso a
la velocidad mxima dependiendo del valor de error, tal como
se realiz la simulacin en la parte inicial de esta prctica.
Realizando la comparacin de los datos experimentales y de la
simulacin ya realizada por medio de simulink, se obtuvo el
siguiente resultado.
Figura 4. Comparacin modelo terico Vs datos
experimentales realizada en Simulink.
Figura 5. Grfica de comparacin de seales de salida real
y terica.
Analizando la grfica obtenida se puede observar que el valor
de estado estacionario del motor lego varia sinusoidalmente
generando as un error permanente a pesar de esfuerzo del
controlador, mostrando as que con este control ON/OFF no se
garantiza un valor de estado estacionario ya que siempre se
presenta error, a comparacin de la salida terica simulada en
matlab la cual despus de cierto tiempo presentaba un error
bastante reducido. Esta diferencia en las salidas es debida a la
construccin fsica del motor as como sus caractersticas tales
como inercia, velocidad de respuesta, sensibilidad,
limitaciones mecnicas, entre otras que delimitan el
comportamiento del sistema de posicin.
2. Control Proporcional del motor LEGO
2.1 Construya en Simulink un lazo de control de posicin (ver
Figura 1 derecha) usando la funcin de transferencia del
motor LEGO (asuma H(s) = 1) y analice qu efectos tiene la
realimentacin en contraste con el sistema en lazo abierto en
relacin a ganancia esttica, tiempo de estabilizacin,
ubicacin de los polos y estabilidad.
Universidad Nacional de Colombia, Informe de Control, Noviembre 7 de 2013
4
Utilizando como base la funcin de transferencia del motor
LEGO, se plantea un sistema de control de posicin con
retroalimentacin y tambin un sistema utilizando los mismos
parmetros pero si el lazo cerrado de retroalimentacin.
Figura 6. Sistema de control de posicin con lazo abierto
Ahora se plantea un sistema de control de posicin de lazo
cerrado.
Figura 7.Sistema de control de lazo cerrado
Las respuestas obtenidas para las respectivas entradas las
observamos en las siguientes graficas.
Figura 8.Respuesta del sistema de control de posicin con
lazo abierto.
Figura 9. Respuesta del sistema de control de posicin con
lazo cerrado
Podemos ver en estas graficas los diferentes comportamientos
del sistema donde la entrada del lazo abierto ( color morado)
y la salida (color verde); en el la respuesta de lazo cerrado
invertidos los colores. A partir de estas respuestas se puede
realizar un anlisis con respecto a la ganancia esttica, el
tiempo de estabilizacin, su error y estabilidad.
Se analiza primero que la respuesta del sistema en lazo abierto
es inestable ya que no existe una valor en el que se estabilice,
por ende el error de posicin y velocidad es infinito. No existe
una ganancia esttica ni un tiempo de estabilizacin por este
motivo.
Ahora bien viendo la respuesta obtenida del sistema
retroalimentado vemos que dicho sistema es estable ya que
trata de seguir a la entrada paso. El error de la respuesta es
cero, es decir el valor final de la entrada es igual al valor final
de la salida, por este motivo concluimos que su ganancia
esttica es uno, y su tiempo de estabilizacin es
aproximadamente 1,4 segundos. Sus polos estn ubicados en [
(-5.85 + 7.33i) y (-5.85 - 7.33i) ] con lo que se confirma que
su parte real es negativa por ende el sistema es estable.
2.2 Implemente y analice los efectos reales de la
realimentacin del motor LEGO en el lazo de control de
posicin. Para la implementacin puede usar el archivo
controlpos.nxc. Analice los mismos aspectos que en el item
anterior pero ahora con las respuestas experimentales del
motor LEGO.
Para este literal se us el motor LEGO MINDSTORMS en
el cual se implement un sistema de control de posicin
mediante lazo abierto y por lazo cerrado (retroalimentado) en
el cul se implement una funcin para realizar dicho control
y poder obtener la salida de datos mediante el BRICX
COMMAND CENTER y all realizar las correspondientes
grficas.
Universidad Nacional de Colombia, Informe de Control, Noviembre 7 de 2013
5
Figura 10. Respuesta del motor en lazo abierto
Figura 11. Respuesta del motor en lazo cerrado
Estas respuestas obtenidas mediante el motor varan segn las
simulaciones debido a que esta es una aproximacin a la
funcin de transferencia del motor y por otro lado el uso y el
desgaste del motor pueden hacer que estas tambin varan un
poco. En estas respuestas obtenidas directamente del motor
confirmamos que si la entrada es un escaln donde su
amplitud es una posicin es de 180, el sistema de control con
lazo abierto es inestable. Mientras que de la respuesta en lazo
cerrado se confirmaba que la ganancia tiende a ser uno
mientras que el error tiende a cero y el tiempo de
estabilizacin es alrededor de 1,4 segundos. Estos resultados
obtenidos en la parte experimental confirman las simulaciones
obtenidas de manera terica y por esto confirma el
comportamiento predicho
2.3 Disee, simule e implemente un sistema de control
proporcional de velocidad del motor LEGO tal que el sistema
en lazo cerrado se estabilice dos veces ms rpido que en lazo
abierto. Describa el procedimiento utilizado para disear el
controlador y verifique que en simulacin se cumpla el
requerimiento solicitado. Para la implementacin puede usar
el archivo controlvel.nxc.
Primero que todo es necesario conocer la funcin de
transferencia del motor Lego, en la prctica 2 realizamos este
procedimiento obteniendo el siguiente resultado:
()
De donde podemos apreciar que el tao del sistema es 0,066
segundos, por lo cual el tiempo de establecimiento de la
funcin de transferencia para un 2% en lazo abierto es
aproximadamente 4 taos, por lo tanto tenemos que este tiempo
es 0,257 segundos y como el requisito es que en lazo cerrado
sea dos veces ms rpido entonces debemos obtener un tiempo
de establecimiento de 0,1285. A continuacin se muestra el
diagrama de bloques con control proporcional de velocidad
deseado.
Figura. 12. Diseo de bloques con control proporcional
Ahora calculamos la funcin de transferencia en lazo cerrado
de la planta y la ganancia proporcional (Kp) de la figura 12,
obteniendo que:
()
()
)
Como podemos observar se trata de un primer orden cuyo tao
corresponde al coeficiente que a compaa a la s y como
mencionamos anteriormente el tiempo de establecimiento es
cercano a 4 taos por lo tanto calculamos la ganancia
proporcional as:
Ahora con la ayuda de Simulink simulamos la funcin de
transferencia en lazo abierto y posteriormente en lazo cerrado
con ganancia Kp para observar los tiempos de
establecimiento, a continuacin en la figura 13 se observa el
diseo propuesto:
Figura 13. Esquema realizado en Simulink para un lazo
cerrado con control proporcional
En la figura 14 se observa en color verde la seal de la entrada
paso, en color azul la respuesta de la funcin en lazo cerrado y
Universidad Nacional de Colombia, Informe de Control, Noviembre 7 de 2013
6
en color naranja observamos la seal de control que ejerce el
amplificador, podemos observar que el sistema se estabiliza en
un tiempo de 1,3 segundos aproximadamente tal y como se
tena previsto en los clculos.
Figura 14. Respuesta del sistema en lazo cerrado ante
escaln unitario
Posteriormente decidimos simular la funcin de transferencia
tanto en lazo cerrado con control proporcional como en lazo
abierto obteniendo el diseo en Simulink mostrado en la figura
15.
Figura 15. Esquema de comparacin de lazo cerrado vs
lazo abierto
En la figura 16 se observan los resultados y podemos observar
la lnea rosada que representa el sistema de control con lazo
abierto, mientras que la lnea color azul indica la respuesta del
sistema con retroalimentacin, se puede corroborar que
efectivamente el tiempo de establecimiento del sistema se
duplica para lazo cerrado con ganancia kp (ts=1.3s) en
comparacin con el sistema en lazo abierto (ts=2.6s). Adems
de estas graficas podemos deducir que el error de posicin
para el sistema retroalimentado se reduce en gran medida pero
en el caso de la ganancia tambin se ve reducida al momento
de cumplir con los criterios de diseo propuestos.
Figura 16. Comparacin de las respuestas de lazo cerrado
con control proporcional vs lazo abierto.
Posteriormente utilizando el archivo controlvel.nxc
implementamos el control proporcional realimentado a la
funcin de transferencia en el motor LEGO, el cdigo
utilizado se presenta a continuacin:
e=Ref-vel;
k = 0.101;
u=k*e;
if(u>=100)
w=98;
else if(u<= -100)
w=-98;
else w=u;
OnFwd(OUT_A,w);
Su resultado se observa en la figura 17, podemos apreciar
claramente que el tiempo de establecimiento est muy cercano
al valor deseado (ts=1.3s) aunque se observa unas
oscilaciones, esto se debe principalmente a que cuando
hallamos la funcin de transferencia hicimos un aproximado
de la funcin real del motor, y ya que no es un objeto ideal
tiene factores propios de su construccin que no permiten una
salida tan pulida como se desea.
Universidad Nacional de Colombia, Informe de Control, Noviembre 7 de 2013
7
Figura 17. Respuesta obtenida del lazo cerrado
implementado en el Motor Lego
2.4 Disee, simule e implemente un sistema de control
proporcional de velocidad del motor LEGO tal que el sistema
en lazo cerrado tenga un error permanente de 10%. Describa
el procedimiento utilizado para disear el controlador y
verifique que en simulacin se cumpla el requerimiento
solicitado. Para la implementacin puede usar el archivo
controlvel.nxc.
El anlisis para el diseo de este control es muy similar a la
seccin anterior, teniendo en cuenta que la funcin de
transferencia equivalente para el sistema retroalimentado es:
()
( )
()
)
Por ende el valor de la ganancia esttica de la funcin del
sistema en lazo cerrado es el numerador de la misma, por lo
tanto:
Si la entrada es un escaln con amplitud de 10, el valor
esperado para K ser de 0.9, es decir un error del 10%, lo que
nos lleva a concluir que el valor de la constante que
corresponde al control proporcional es de:
Si realizamos las correspondientes simulaciones en Simulink
con el controlador con Kp=0.989 montando el mismo esquema
utilizado en la Figura 1, los resultados de la simulacin se
muestra a continuacin en la Figura 18.
Figura 18. Respuesta obtenida del lazo cerrado
implementado Simulink para un error del 10%.
La lnea verde indica el valor del escaln de entrada, el color
azul la respuesta del sistema y la lnea rosa el error medido a
la salida del amplificador. Podemos apreciar que ante una
entrada de un escaln de 800 obtenemos una salida de 720
por lo tanto obtenemos un error del 10% (80 unidades),
adems se puede corroborar observando la lnea rosa que se
estabiliza en un valor de 80 confirmando lo anterior.
Posteriormente utilizando el archivo controlvel.nxc
implementamos el controlador proporcional realimentado a la
funcin de transferencia en el motor LEGO, los resultados se
presentan en la figura 19.
Figura 19. Respuesta obtenida del Motor LEGO ante lazo
cerrado con ganancia proporcional.
La entrada del motor fue de 800 para tratar de evitar en mayor
medida el ruido y las perturbaciones, pero fue imposible evitar
la influencia de esas entradas en el sistema, lo que conllev a
que la salida del motor no sea tan buena, ya que la amplitud
del ruido es muy grande. Aun as es posible observar que el
valor de estado estacionario es aproximadamente 680, lo que
implica que el error est alrededor del 15%, siendo este un
valor cercano al objetivo planeado que era tener un error del
10%.
Universidad Nacional de Colombia, Informe de Control, Noviembre 7 de 2013
8
2.5 .Disee, simule e implemente un sistema de control
proporcional de posicin del motor LEGO tal que el sistema
en lazo cerrado se estabilice en 2,5seg Describa el
procedimiento utilizado para disear el controlador y
verifique que en simulacin se cumpla el requerimiento
solicitado. A partir de la respuesta experimental del sistema
de control proporcional obtenga el error permanente, la
ganancia del sistema en lazo cerrado, el tiempo de
estabilizacin y el sobre nivel porcentual. Muestre la
respuesta experimental obtenida y contrstela con la obtenida
en simulacin. Para la implementacin puede usar y
modificar el programa controlpos.nxc.
La planta (incluyendo el integrador) en lazo abierto tiene la
siguiente funcin de transferencia:
En lazo cerrado la funcin de transferencia es:
El tiempo deseado de establecimiento es 2.5 segundos.Para
obtener un sistema de segundo orden en base a la funcin de
transferencia del motor esta se debe integrar.Mediante la
condicin de magnitud se puede evaluar en el tiempo de
establecimiento deseado y obtener k de la siguiente manera:
Ahora bien conociendo la funcin de transferencia tenemos
que
De donde podemos hallar que
Realizando la simulacin para el sistema propuesto en
MATLAB bajo la herramienta SIMULINK podemos
observar que el diseo cumple las especificaciones requeridas
por la de laboratorio ya que el tiempo de estabilizacin del
sistema es 2.5 segundos, este resultado se muestra a
continuacin.
Figura 20. Repuesta del sistema de control proporcional de
posicin para un tiempo de estabilizacin definido en 2.5
segundos.
Posteriormente realizamos la implementacin en el LEGO
introduciendo el siguiente algoritmo al archivo controlpos.nxc:
sal = Ref-posicion;
if(sal>100){
sal= 100;
}
OnFwd(OUT_A,(sal)*K);
Para este caso fijamos la referencia en 100 y a k se le asign
un valor de 0,1521, obtenemos una serie de datos que
posteriormente pasamos a travs de MatLab y conseguimos la
respuesta del motor presentada en la figura 21.
Figura 21. Repuesta del sistema de control proporcional de
posicin implementado en el LEGO.
Efectivamente se pudo corroborar que se alcanza un tiempo de
estabilizacin cercano a los 2,5 segundos, pero se observa que
se presenta un error de posicin ya que nuestra referencia
implementada tena un valor de 100 y el motor se logra
estabilizar en 90, por lo tanto obtenemos un error de 10 de
posicin aunque el criterio de tiempo se cumple
perfectamente.
2.6 Explique por qu el error permanente no lleg a cero
en la implementacin del sistema de control de posicin a
pesar de ser un sistema tipo 1. Realice una demostracin
que justifique su explicacin, puede ser una demostracin
matemtica o mediante simulacin.
Universidad Nacional de Colombia, Informe de Control, Noviembre 7 de 2013
9
Pensamos que el error permanente no llegaba a cero a pesar de
ser un sistema tipo 1 ante una entrada escaln debido a dos
razones principalmente, la primera era que las perturbaciones
propias del motor podan causar alteraciones considerables en
la salida, por lo tanto decidimos simular un ruido o
perturbacin que ingresa al sistema, ya que el LEGO puede
tener perturbaciones de tipo mecnico o incluso el sensor
puede estar distorsionado a pesar de tener un controlador tipo
K+Ki/S. El esquema de la simulacin realizada se encuentra a
continuacin en la figura 22.
Figura 22. Sistema de lazo cerrado del LEGO con entrada
de ruido para demostracin del seguimiento total de la
seal
Por otro lado la saturacin del motor tambin influye en la
toma de datos por parte del sensor y como la misma no es
tenida en cuenta para esta prctica puede ser un factor a tener
en cuenta para futuras acciones de control. Los resultados de
esta prueba se pueden apreciar a continuacin en la figura 23.
Figura 22. Respuesta del sistema real del LEGO con
entrada de ruido para observar perturbaciones.
La lnea amarilla hace referencia a la entrada escaln, la azul
pertenece a la respuesta del sistema, la morada a la salida del
amplificador (seal de control) y la roja a las perturbaciones
introducidas, se pudo comprobar que la seal de salida
cambia su ganancia esttica y por lo tanto se ocasiona un
pequeo error, para este caso un 3-4% aproximadamente,
queda en evidencia que el mismo no es robusto porque no
resiste pequeas perturbaciones.
Puede verse tambin, que la seal de control trata siempre de
contra restar el ruido y por ello tampoco llega a un valor
estable. Esto se debe a que la seal de referencia y de salida se
le suma los componentes de pequea seal del ruido y hace
que el controlador siempre est intentando estabilizar la seal
resultante haciendo que el valor final de la seal de salida
quede en un valor DC inferior al de la referencia. Cabe resaltar
que el motor puede presentar histresis en algunos momentos
y por lo tanto no es lineal produciendo algunas
descompensaciones para la seal de control.
La segunda razn est relacionada con la velocidad mnima
que tiene el motor, esto se refiere a que el motor presenta
dificultades cuando hay velocidades pequeas, para este caso
calculamos la velocidad que tiene el motor cuando se
encuentra en estado estacionario:
()
Esto nos quiere decir que a medida que se acerca a la
referencia el motor disminuye su velocidad pero hay un punto
en el cual la velocidad es tan pequea que el motor deja de
moverse y se estabiliza antes de llegar al valor requerido,
modificando la implementacin del cdigo decidimos cambiar
la referencia a 80 y observar el comportamiento del motor, el
resultado obtenido se presenta a continuacin:
Figura 23. Respuesta del sistema real del ante una
modificacin en el valor de la referencia, para este caso
igual a 80.
Como podemos observar cambiamos el valor de la referencia a
un valor de 80 y el error se encuentra muy cercano a 10, esto
era de esperarse ya que solo cambiamos la referencia pero no
modificamos la planta realizando el mismo clculo del punto
anterior obtenemos:
()
Por lo tanto podemos concluir que para velocidades inferiores
a 1,521 el motor no puede seguir girando y por lo tanto se
Universidad Nacional de Colombia, Informe de Control, Noviembre 7 de 2013
10
estabiliza alejado de la posicin de referencia, ocasionando un
error de posicin.
CONCLUSIONES
Los sistemas de lazo abierto dependen de la
calibracin del controlador y son incapaces de medir qu
tanto se alejan de una seal de referencia o valor
esperado.
Los sistemas retroalimentados son capaces de medir
la diferencia de la seal de salida con la seal de entrada,
lo que se denomina error.
El control ON/OFF vara la salida de acuerdo a un
valor determinado de la seal de control, definido por el
error entre la referencia de entrada y la salida, siendo esta
la manera ms sencilla de realizar control.
El control proporcional en un sistema de control es
relativamente sencillo, sin embargo no puede obtener un
error de cero.
En un sistema de control proporcional, al aumentar la
ganancia, se reduce el error en igual medida, aunque
aumentar demasiado la ganancia puede ocasionar
problemas de estabilidad o sobre picos muy altos.
El los sistemas de control proporcional es posible
adecuar el tiempo de estabilizacin a un valor deseado,
sin embargo, hay efectos en la ganancia y por lo tanto en
el error.
En un controlador ON/OFF la seal de salida tiene
una forma ondulatoria. Si el tiempo de swicheo es
pequeo se puede seguir mejor a la seal de referencia.
El control ON/OFF a pesar de ser el ms sencillo y
ms econmico (a corto plazo), causa un desgaste en el
controlador debido al encendido/apagado del mismo, lo
que llevara un sobrecosto en mantenimiento a largo
plazo.
El criterio de escoger un controlador ON/OFF o
proporcional debe basarse en aspectos como costo,
requerimientos de error (si requiere o no que siga la seal
de referencia con poca o mucha diferencia), o en la
libertad que tenga el ingeniero de establecer un tiempo
de estabilizacin (si el proceso requiere un tiempo de
estabilizacin determinado).
El diseador se enfrentar a elegir satisfacer criterios
de velocidad de respuesta del sistema vs la minimizacin
del error de estado estacionario, por lo que debe siempre
hacer un balance que permita cumplir si no ambos
criterios, al menos uno de ellos sin sacrificar al otro.
A pesar que en teora un sistema tipo 1 para un
control de posicin debera tener un error permanente
de cero esto en la prctica no se pudo cumplir debido a
las propiedades introducidas por el Motor LEGO que
ocasionaban pequeos errores en la respuesta del
sistema, en la simulacin realizada se obtuvo hasta un
error del 3-4%.
REFERENCIAS
[1] N.C. LEGO Mindstorms products. (2012). Consultado:
Agosto 19 de 2012 en: http://mindstorms.lego.com/en-
us/products/default.aspx.
[2] N.C. Open directory project, LEGO
Mindstorms.(2012). Cnsultado: Agosto 19 de 2012 en:
http://www.dmoz.org/Recreation/Collecting/Toys/Lego/T
hemes/Mindstorms/
[3] Orf, Richard, Sistemas de Control Moderno, 10 Edicion-
Prentice Hall, Pearson Education. 2005
También podría gustarte
- Actividades de Orden y Valor Absoluto de Los EnterosDocumento5 páginasActividades de Orden y Valor Absoluto de Los EnterosGuillermo Enrique Martinez PrietoAún no hay calificaciones
- Prueba de Hipótesis para Media Poblacional en Muestras Pequeñas (Material de Apoyo y de Trabajo para El Estudiante)Documento7 páginasPrueba de Hipótesis para Media Poblacional en Muestras Pequeñas (Material de Apoyo y de Trabajo para El Estudiante)jose aguilarAún no hay calificaciones
- Ejercicios Resueltos de Mecánica Newtoniana EPN - Ing. Edgar HaroDocumento138 páginasEjercicios Resueltos de Mecánica Newtoniana EPN - Ing. Edgar HaroKAGGHGAún no hay calificaciones
- Ejercicios VectoresDocumento2 páginasEjercicios VectoresGuillermo TellAún no hay calificaciones
- Informe Gestion de RiesgoDocumento6 páginasInforme Gestion de RiesgochuachupomaAún no hay calificaciones
- Mpes U1 A1 KaamDocumento3 páginasMpes U1 A1 KaamMitchell Hyde100% (2)
- Inv #1 7AIMDocumento15 páginasInv #1 7AIMCarlosAún no hay calificaciones
- Mipm - U1 - A3 - V1 - RimcDocumento6 páginasMipm - U1 - A3 - V1 - RimcLuisa Mee 666Aún no hay calificaciones
- Resumen Conta V - Prof MucelliDocumento118 páginasResumen Conta V - Prof MucelliLisandro100% (1)
- Prueba Saber de Matemáticas 10Documento4 páginasPrueba Saber de Matemáticas 10Erick Alexander Reina BeltranAún no hay calificaciones
- Ejercicios MatematicosDocumento42 páginasEjercicios MatematicoscatherinneAún no hay calificaciones
- Difusión SeisDocumento8 páginasDifusión SeisSharon Camarillo peñaAún no hay calificaciones
- Lectura - Algoritmo Maximización de Esperanzas PDFDocumento19 páginasLectura - Algoritmo Maximización de Esperanzas PDFOrlando SotoAún no hay calificaciones
- Fisica Aplicada 1Documento6 páginasFisica Aplicada 1rodrigo mamani apazaAún no hay calificaciones
- Clasificacion de Flujos de FluidosDocumento5 páginasClasificacion de Flujos de FluidosFredy Flores Meres100% (1)
- Planillas de Inspección PDFDocumento4 páginasPlanillas de Inspección PDFHumberto ZamoraAún no hay calificaciones
- Conica CircunferenciaDocumento14 páginasConica CircunferenciaPATRICK JESUS CORDOVA GARATEAún no hay calificaciones
- ALGOR ES DATOS Semana5 Modularizacion-LibreriasRecursividadDocumento37 páginasALGOR ES DATOS Semana5 Modularizacion-LibreriasRecursividadJean Carlos TupAún no hay calificaciones
- Aprendo Probabilidades - 5°Documento16 páginasAprendo Probabilidades - 5°justofloresAún no hay calificaciones
- IID - Guia de Practica 01Documento41 páginasIID - Guia de Practica 01ANGELO JOSE MEJIA CARDENASAún no hay calificaciones
- Algoritmo de KruskalDocumento19 páginasAlgoritmo de KruskalPabloValenciaAún no hay calificaciones
- Pensamiento RelacionalDocumento18 páginasPensamiento RelacionalMARIA BELEN SEGOVIA ZAMBRANOAún no hay calificaciones
- Entrega Final Proyecto de ViasDocumento34 páginasEntrega Final Proyecto de ViasDaniela CelyAún no hay calificaciones
- FisicaDocumento17 páginasFisicaWillingtonRamirezPaleAún no hay calificaciones
- Guia de Trabajo Cuarto Basico DivisoresDocumento5 páginasGuia de Trabajo Cuarto Basico DivisoresCarmen Gloria Bravo GonzálezAún no hay calificaciones
- 9 - Razonamiento LógicoDocumento5 páginas9 - Razonamiento LógicoFe en DiosAún no hay calificaciones
- Fase 1Documento4 páginasFase 1Paola TabaresAún no hay calificaciones
- Concursos Internacionales de in - Skiena, Steven S. - Revilla RamDocumento394 páginasConcursos Internacionales de in - Skiena, Steven S. - Revilla Ramkaren CofréAún no hay calificaciones
- Guía #4 Matemática Función Lineal y AfínDocumento45 páginasGuía #4 Matemática Función Lineal y AfínBernardo Andres Miranda DonosoAún no hay calificaciones
- Sistema de CoordenadasDocumento5 páginasSistema de CoordenadasGeovanny CudcoAún no hay calificaciones