También podría gustarte
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsDe EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsAún no hay calificaciones
- Study of a reluctance magnetic gearbox for energy storage system applicationDe EverandStudy of a reluctance magnetic gearbox for energy storage system applicationCalificación: 1 de 5 estrellas1/5 (1)
- Gunderson Solid-State Generator Moves Magnetic Flux Without Moving PartsDocumento0 páginasGunderson Solid-State Generator Moves Magnetic Flux Without Moving PartsmatijahAún no hay calificaciones
- 3B Scientific® Physics: U15310 Wimshurst MachineDocumento2 páginas3B Scientific® Physics: U15310 Wimshurst MachineScience HouseAún no hay calificaciones
- The Steorn Orbo Motor ReplicationDocumento32 páginasThe Steorn Orbo Motor ReplicationXR500FinalAún no hay calificaciones
- Solid State Electric Generator Uses Magnetic FluxDocumento9 páginasSolid State Electric Generator Uses Magnetic FluxDan Beeson100% (2)
- Anti-Lenz - Anti-LenzDocumento6 páginasAnti-Lenz - Anti-LenzTomislav JovanovicAún no hay calificaciones
- MAGLEV Wind Mill Power GenerationDocumento16 páginasMAGLEV Wind Mill Power GenerationNagabhushanaAún no hay calificaciones
- Generation of Electricity Using Fan PDFDocumento4 páginasGeneration of Electricity Using Fan PDFAmruta KageAún no hay calificaciones
- Method and Apparatus for Increasing Electrical PowerDocumento7 páginasMethod and Apparatus for Increasing Electrical PowerMihai DanielAún no hay calificaciones
- Motionless Electromagnetic GeneratorDocumento9 páginasMotionless Electromagnetic GeneratorViswa TejaAún no hay calificaciones
- Avoiding (Minimizing) Lenz LawDocumento2 páginasAvoiding (Minimizing) Lenz LawVinyasi100% (1)
- Zilano Important Older DS Posts AbridgedDocumento147 páginasZilano Important Older DS Posts Abridgedscolem26100% (1)
- Homemade Magnetic Amplifiers Using Common 12 Volt TransformersDocumento8 páginasHomemade Magnetic Amplifiers Using Common 12 Volt TransformersVjekoslav NovoselAún no hay calificaciones
- Power Generation by Foot Step Method - Rack and PinionDocumento13 páginasPower Generation by Foot Step Method - Rack and Pinionprem53100% (2)
- Magnetic Motor PlansDocumento24 páginasMagnetic Motor PlansFrau SchassbergerAún no hay calificaciones
- Petkov Document CircutisDocumento470 páginasPetkov Document CircutisJumpman OutletAún no hay calificaciones
- Vasiliev OV Electricity and Unusual FeaturesDocumento93 páginasVasiliev OV Electricity and Unusual FeaturesPopescu George BogdanAún no hay calificaciones
- Tesla Coil Document - OscDocumento13 páginasTesla Coil Document - Oscomkar chitnisAún no hay calificaciones
- William J Hooper's Research into Electric, Magnetic and Gravitational FieldsDocumento43 páginasWilliam J Hooper's Research into Electric, Magnetic and Gravitational Fieldsv8karlo100% (1)
- Flyback Driver CircuitoDocumento15 páginasFlyback Driver CircuitoCarlos Sarmiento LoraAún no hay calificaciones
- FleetDocumento5 páginasFleetEdmundo Macias ArenasAún no hay calificaciones
- Free Energy GenerationDocumento3 páginasFree Energy Generationjohn peterAún no hay calificaciones
- Runs Cars and Lights On Magnetic Pulse Technology: Very Important DVD Is VOLUME 4 - Troy ReedDocumento4 páginasRuns Cars and Lights On Magnetic Pulse Technology: Very Important DVD Is VOLUME 4 - Troy ReedrobertrussellnyAún no hay calificaciones
- Free-Energy:: Nikola Tesla Secrets For EverybodyDocumento67 páginasFree-Energy:: Nikola Tesla Secrets For Everybodyto_netiksAún no hay calificaciones
- E. v. Gray Analysis by William S. AlekDocumento1 páginaE. v. Gray Analysis by William S. Alekscribdsandu100% (1)
- US4675615 - Magnetic AmplifierDocumento8 páginasUS4675615 - Magnetic AmplifierDra_en_Ku_mi__5308100% (1)
- Iaetsd-Searl Effect PDFDocumento7 páginasIaetsd-Searl Effect PDFiaetsdiaetsdAún no hay calificaciones
- Lutec and Zero PointDocumento8 páginasLutec and Zero PointRed Bluelight100% (1)
- Build efficient Lenzless transformer using resonant LC circuitsDocumento8 páginasBuild efficient Lenzless transformer using resonant LC circuitsGindac Ralea100% (1)
- Bruce E. Depalma: N-Machine: Extraction of Electrical Energy Directly From Space: The N-MachineDocumento7 páginasBruce E. Depalma: N-Machine: Extraction of Electrical Energy Directly From Space: The N-MachineHaris DizdarevicAún no hay calificaciones
- HHO Pulse Charger 2.0 InfoDocumento4 páginasHHO Pulse Charger 2.0 InfoAleksa Nataša Rančić100% (1)
- Sources of Radiant EnergyDocumento1 páginaSources of Radiant EnergyRjvm Net Ca Fe100% (1)
- Magnet Power ExplainedDocumento52 páginasMagnet Power ExplainedMayki ChiAún no hay calificaciones
- PPMT Technology White PaperDocumento5 páginasPPMT Technology White Papermjstrand1Aún no hay calificaciones
- Tesla Coil Project: V1 Cprobe 15p CP 9.3p L1 19.5m R1 1megDocumento9 páginasTesla Coil Project: V1 Cprobe 15p CP 9.3p L1 19.5m R1 1megNISHANT KumarAún no hay calificaciones
- Vacuum EnergyDocumento125 páginasVacuum EnergyRamachandra Bhat HireAún no hay calificaciones
- BEDINI DiagramDocumento5 páginasBEDINI DiagramEfren Rambo Rafanan100% (1)
- Mueller - Experiments With The Kromrey ConverterDocumento33 páginasMueller - Experiments With The Kromrey ConverterDra_en_Ku_mi__5308100% (2)
- Andrey Melnichenko 19 AugDocumento3 páginasAndrey Melnichenko 19 AugJaroslav KnopAún no hay calificaciones
- Visible light and solar powerDocumento4 páginasVisible light and solar powerGilberto ManhattanAún no hay calificaciones
- WirelessDocumento65 páginasWirelessKrishnaa Anil ShashwatAún no hay calificaciones
- A noobs guide to Ufopolitics and cold electricity circuitsDocumento19 páginasA noobs guide to Ufopolitics and cold electricity circuitsAndrej Juli Borko NesoviAún no hay calificaciones
- Thermodynamics 2Documento7 páginasThermodynamics 2riez24Aún no hay calificaciones
- (Free Energy) Kunel PatentDocumento9 páginas(Free Energy) Kunel PatentIra Weinstein100% (1)
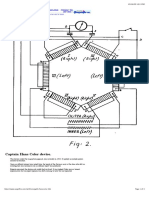
- The Inventions of CaptainDocumento3 páginasThe Inventions of CaptainAngela0220Aún no hay calificaciones
- Veljko Milkovic Two Stage Mechanical OscillatorDocumento39 páginasVeljko Milkovic Two Stage Mechanical OscillatorAbigaile2009Aún no hay calificaciones
- Secret Life of CapacitorsDocumento11 páginasSecret Life of CapacitorsAni VinAún no hay calificaciones
- Mylow Magnet Motor Plans v2-1Documento18 páginasMylow Magnet Motor Plans v2-1hawk789Aún no hay calificaciones
- Alexkor's battery charging circuit guideDocumento11 páginasAlexkor's battery charging circuit guideOlaAún no hay calificaciones
- Electrostatic Generator: Static ElectricityDocumento9 páginasElectrostatic Generator: Static ElectricityHari KrishnanAún no hay calificaciones
- Nikola Tesla Notes On A Unipolar Generator The Electrical EngineerDocumento10 páginasNikola Tesla Notes On A Unipolar Generator The Electrical EngineerDiego Betancourt MejiaAún no hay calificaciones
- Nikola Tesla Faster Than LightDocumento2 páginasNikola Tesla Faster Than LightBranko Stanković100% (1)
- A Guide to Motionless Pulsed Energy SystemsDocumento127 páginasA Guide to Motionless Pulsed Energy SystemsjwarswolvesAún no hay calificaciones
- A Theoretical Explanation of How Free Energy Operates in Our UniverseDocumento28 páginasA Theoretical Explanation of How Free Energy Operates in Our UniverseVinyasi100% (2)
- MHD GeneratorDocumento74 páginasMHD GeneratorMephistopheles1Aún no hay calificaciones
- Where Is The Free EnergyDocumento5 páginasWhere Is The Free EnergyAnonymous CabWGmQw0% (1)
- TestatikaDocumento1 páginaTestatikaCsaba LangerAún no hay calificaciones
- Testatika Princip PDFDocumento0 páginasTestatika Princip PDFmanos306Aún no hay calificaciones
- Stanley Meyer Big Bobbin Builders Guide 2019 v1: Very Rare Guide for How to Assemble Water Fueled injector tri-filar bobbinDe EverandStanley Meyer Big Bobbin Builders Guide 2019 v1: Very Rare Guide for How to Assemble Water Fueled injector tri-filar bobbinAún no hay calificaciones
- Software Release Notes: Segment CheckerDocumento5 páginasSoftware Release Notes: Segment CheckerRamon GarciaAún no hay calificaciones
- Segment Checker ManualDocumento32 páginasSegment Checker ManualCarlos VidelaAún no hay calificaciones
- Mvi69 MCM User ManualDocumento167 páginasMvi69 MCM User Manualms_eng_2011Aún no hay calificaciones
- The Safety Valve: To Whom It May ConcernDocumento8 páginasThe Safety Valve: To Whom It May ConcernRamon GarciaAún no hay calificaciones
- Software Release Notes: Segment CheckerDocumento5 páginasSoftware Release Notes: Segment CheckerRamon GarciaAún no hay calificaciones
- VALVESTAR TranslationDocumento3 páginasVALVESTAR TranslationStefano MilaniAún no hay calificaciones
- Spares FMP51-BAECCDACC3AGJ+ADZ1 PDFDocumento3 páginasSpares FMP51-BAECCDACC3AGJ+ADZ1 PDFRamon GarciaAún no hay calificaciones
- Segment Checker ManualDocumento32 páginasSegment Checker ManualCarlos VidelaAún no hay calificaciones
- DIDIDocumento3 páginasDIDIRamon GarciaAún no hay calificaciones
- Characteristics Value Description: Endress+Hauser Mon, 20 Jun 2016 Page 1 / 3Documento3 páginasCharacteristics Value Description: Endress+Hauser Mon, 20 Jun 2016 Page 1 / 3Ramon GarciaAún no hay calificaciones
- Industrial Control 700 HKDocumento6 páginasIndustrial Control 700 HKRamon GarciaAún no hay calificaciones
- Instruction Manual Enardo 2000 2500 Series Emergency Pressure Relief Vents North America Only en 122600 3Documento8 páginasInstruction Manual Enardo 2000 2500 Series Emergency Pressure Relief Vents North America Only en 122600 3Ramon GarciaAún no hay calificaciones
- Deltav M-Series Traditional Io (2013)Documento28 páginasDeltav M-Series Traditional Io (2013)Ramon GarciaAún no hay calificaciones
- VALVESTAR TranslationDocumento3 páginasVALVESTAR TranslationStefano MilaniAún no hay calificaciones
- Ti01060den 0716Documento88 páginasTi01060den 0716Ramon GarciaAún no hay calificaciones
- Calculo de Valvula 0.75Documento1 páginaCalculo de Valvula 0.75Ramon GarciaAún no hay calificaciones
- Cajas Envolventes y TerminalesDocumento82 páginasCajas Envolventes y TerminalesRamon GarciaAún no hay calificaciones
- 848TDocumento136 páginas848TRamon GarciaAún no hay calificaciones
- Ti01084den 0414Documento96 páginasTi01084den 0414Ramon GarciaAún no hay calificaciones
- Interruptores de Posicion TurckDocumento5 páginasInterruptores de Posicion TurckRamon GarciaAún no hay calificaciones
- 0.80mm (.031") Pitch Docking Station Board-to-Board Shielded PlugDocumento1 página0.80mm (.031") Pitch Docking Station Board-to-Board Shielded PlugRamon GarciaAún no hay calificaciones
- Cajas Envolventes y TerminalesDocumento82 páginasCajas Envolventes y TerminalesRamon GarciaAún no hay calificaciones
- Gateway WirelessDocumento6 páginasGateway WirelessRamon GarciaAún no hay calificaciones
- Interruptores de Posicion TurckDocumento5 páginasInterruptores de Posicion TurckRamon GarciaAún no hay calificaciones
- Atharva Veda.: Ye Trishpta: Pariyanthi VishwaDocumento6 páginasAtharva Veda.: Ye Trishpta: Pariyanthi VishwaDushyant Singh SolankiAún no hay calificaciones
- Texas FlangeDocumento76 páginasTexas FlangeggansAún no hay calificaciones
- Atharva Veda.: Ye Trishpta: Pariyanthi VishwaDocumento6 páginasAtharva Veda.: Ye Trishpta: Pariyanthi VishwaDushyant Singh SolankiAún no hay calificaciones
- 345 Regulador Alta PresionDocumento12 páginas345 Regulador Alta PresionRamon GarciaAún no hay calificaciones
- Catalogo de Sensores de Prox P and FDocumento76 páginasCatalogo de Sensores de Prox P and FRamon GarciaAún no hay calificaciones
- Motor Rewinding - DETAILS OF WINDINGDocumento12 páginasMotor Rewinding - DETAILS OF WINDINGAbdul Halil Abdullah100% (1)
- AC AC TransformerDocumento4 páginasAC AC TransformerKevin GianeAún no hay calificaciones
- Transformer Condition AssessmentDocumento8 páginasTransformer Condition AssessmentEdgarCabanesAún no hay calificaciones
- EEE-5101 Power System EngineeringDocumento19 páginasEEE-5101 Power System EngineeringASIF NEOWAZAún no hay calificaciones
- مولدات التيار المستمرDocumento39 páginasمولدات التيار المستمرblbmalekAún no hay calificaciones
- TransducerDocumento70 páginasTransducersmcoolguy68100% (1)
- Kseb Tender SpecsDocumento54 páginasKseb Tender SpecsMuhammed AnasAún no hay calificaciones
- Lab Manual 15eclo2lDocumento65 páginasLab Manual 15eclo2lSyaoran7LiAún no hay calificaciones
- 4MKM0707 - RevA1 - User Manual MV7000 NPP - Part5 - Protection & DiagnosticsDocumento9 páginas4MKM0707 - RevA1 - User Manual MV7000 NPP - Part5 - Protection & DiagnosticsiuliiulianAún no hay calificaciones
- AlternatorDocumento84 páginasAlternatorVignesh Kumar100% (1)
- Control Lab Manual 01Documento11 páginasControl Lab Manual 01doppler9effectAún no hay calificaciones
- LS Cast Resin Transformers CatalogueDocumento16 páginasLS Cast Resin Transformers CatalogueaderezossAún no hay calificaciones
- WEG Soft Starter Manual Usass11 Brochure English PDFDocumento232 páginasWEG Soft Starter Manual Usass11 Brochure English PDFsharan87Aún no hay calificaciones
- Induced Voltage Moving MagnetDocumento14 páginasInduced Voltage Moving MagnetCroativan100% (1)
- Residual Current Protective Devices Primer 6852Documento76 páginasResidual Current Protective Devices Primer 6852Ali DoostmohammadiAún no hay calificaciones
- Grade 12 Physics Investigatory ProjectDocumento3 páginasGrade 12 Physics Investigatory ProjectAziyaAún no hay calificaciones
- Chapter 31Documento22 páginasChapter 31OmarWaelAún no hay calificaciones
- Practice Paper (4) - 2020-2021Documento10 páginasPractice Paper (4) - 2020-2021Sankalp PariharAún no hay calificaciones
- Glentek SMA8115 SMA8215 SMA8315 ManualDocumento80 páginasGlentek SMA8115 SMA8215 SMA8315 ManualYaseen JamilAún no hay calificaciones
- DC Machine Types of WindingsDocumento43 páginasDC Machine Types of Windingstutorritu100% (2)
- Electrical Circuits III PDFDocumento42 páginasElectrical Circuits III PDFRolando Cruz50% (2)
- Castillo - Girly - A - Sel-Based - DLP ScienceDocumento7 páginasCastillo - Girly - A - Sel-Based - DLP ScienceGirly CastilloAún no hay calificaciones
- Energies 13 02589 PDFDocumento21 páginasEnergies 13 02589 PDFshahAún no hay calificaciones
- Transformer Handbook Electrical Engineering XYZ - CDocumento12 páginasTransformer Handbook Electrical Engineering XYZ - Cyogendra.utlAún no hay calificaciones
- Electrical Theory Generator FundamentalsDocumento48 páginasElectrical Theory Generator FundamentalssulemankhalidAún no hay calificaciones
- Brushless DC Motor Uses Slotless DesignDocumento7 páginasBrushless DC Motor Uses Slotless DesigntutulungoqwertyAún no hay calificaciones
- Question Bank For Electric General ServicesDocumento116 páginasQuestion Bank For Electric General Servicesgayathrikanduri100% (1)
- Speed Control of BLDC Motor by Using PWM TechniqueDocumento7 páginasSpeed Control of BLDC Motor by Using PWM TechniquewaweeAún no hay calificaciones
- Hamilton Sundsrand AC Gen 24-20-77Documento182 páginasHamilton Sundsrand AC Gen 24-20-77David ObiAún no hay calificaciones
- Xii STD - em NotesDocumento166 páginasXii STD - em NotesHaard JoshiAún no hay calificaciones