También podría gustarte
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- SIP Trunk Cost and TariffDocumento9 páginasSIP Trunk Cost and TariffHENG SONGAún no hay calificaciones
- Students Attendances System Using Face RecognitionDocumento8 páginasStudents Attendances System Using Face RecognitionIJRASETPublicationsAún no hay calificaciones
- R0310WL007224Documento1 páginaR0310WL007224princesenapati59Aún no hay calificaciones
- Magento Training PDFDocumento162 páginasMagento Training PDFVenkat Vemuri100% (1)
- View Invoice - ReceiptDocumento1 páginaView Invoice - Receiptspeak2ebiniAún no hay calificaciones
- Spreadsheet Mapper v3.2Documento33 páginasSpreadsheet Mapper v3.2Elismar AlvesAún no hay calificaciones
- .5 Computer Teaching StrategiesDocumento40 páginas.5 Computer Teaching StrategiesELIZABETH GRACE AMADORAún no hay calificaciones
- Installing The TCD To FID Series Connector: 4890, 5890, 6890 Gas Chromatographs Accessory 19232CDocumento10 páginasInstalling The TCD To FID Series Connector: 4890, 5890, 6890 Gas Chromatographs Accessory 19232C신지훈Aún no hay calificaciones
- Requirement Engineering Report ForDocumento22 páginasRequirement Engineering Report ForIkramAún no hay calificaciones
- Dire Dawa University Institute of Technology School of Computing Department of Computer ScienceDocumento13 páginasDire Dawa University Institute of Technology School of Computing Department of Computer SciencezelalemAún no hay calificaciones
- 03 Activity 3 - ARGDocumento4 páginas03 Activity 3 - ARGstapaAún no hay calificaciones
- Construction Management and EconomicsDocumento24 páginasConstruction Management and EconomicsEyob MitekuAún no hay calificaciones
- Js PHPDocumento15 páginasJs PHPQweena Indo-olshopAún no hay calificaciones
- E680 Instruction Manual EN V1.30Documento40 páginasE680 Instruction Manual EN V1.30Роман НазаренкоAún no hay calificaciones
- Cape Fear Conference Center B - Google SearchDocumento1 páginaCape Fear Conference Center B - Google SearchWright AngeliaAún no hay calificaciones
- Quantum User ManualDocumento135 páginasQuantum User Manualjohn truongAún no hay calificaciones
- ICTNWK546: PortfolioDocumento12 páginasICTNWK546: Portfoliotilak adhikari100% (1)
- CV - Jelinta Margareth Rotua - 2022Documento1 páginaCV - Jelinta Margareth Rotua - 2022sandy fumyAún no hay calificaciones
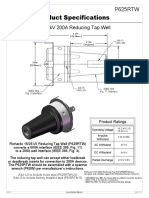
- Product Specifications: 15/25 KV 200A Reducing Tap WellDocumento1 páginaProduct Specifications: 15/25 KV 200A Reducing Tap WellJulio GongoraAún no hay calificaciones
- Discuss The Benefits and Constraints of Different Network Types and StandardsDocumento31 páginasDiscuss The Benefits and Constraints of Different Network Types and StandardsNguyen Manh TaiAún no hay calificaciones
- Learn Python 3 - Hello World Cheatsheet - CodecademyDocumento4 páginasLearn Python 3 - Hello World Cheatsheet - CodecademyTHE LCAAún no hay calificaciones
- Standby - FAQ - Oracle Technology Stack - How To Speed Up and Troubleshooting MRP (Log Apply Rate of A Standby Database) Stuck IssuesDocumento1 páginaStandby - FAQ - Oracle Technology Stack - How To Speed Up and Troubleshooting MRP (Log Apply Rate of A Standby Database) Stuck IssuessbabuindAún no hay calificaciones
- Code KartDocumento9 páginasCode KartDronadula Venkata Sumanth SumanthAún no hay calificaciones
- Confidential NOT FOR External USE: Operator'S ManualDocumento142 páginasConfidential NOT FOR External USE: Operator'S ManualEnrique Potrero100% (1)
- Peac 2022 Learning Plan TemplateDocumento21 páginasPeac 2022 Learning Plan Templaterommel merceneAún no hay calificaciones
- Mathematics 2a Work Book (F)Documento151 páginasMathematics 2a Work Book (F)Jo pAún no hay calificaciones
- Atoll 3.4.0 Technical Reference Guide Radio (Aug 2019)Documento993 páginasAtoll 3.4.0 Technical Reference Guide Radio (Aug 2019)Marvin Manalastas100% (1)
- Mouselabtracker: User Guide (V0.2.9)Documento13 páginasMouselabtracker: User Guide (V0.2.9)Janice FigueiredoAún no hay calificaciones
- Individual AssignmentDocumento13 páginasIndividual AssignmentLife of LokiniAún no hay calificaciones
- H004817 WiFi N Install ManualDocumento43 páginasH004817 WiFi N Install Manual椿さりかAún no hay calificaciones