También podría gustarte
- Semitotal Dominating SetDocumento11 páginasSemitotal Dominating Setcoe18d004Aún no hay calificaciones
- Lowest-Cost Routing: EE 122: Intro To Communication NetworksDocumento65 páginasLowest-Cost Routing: EE 122: Intro To Communication Networksmathi0000Aún no hay calificaciones
- A Top-Down Compiler For Sentential Decision DiagramsDocumento8 páginasA Top-Down Compiler For Sentential Decision DiagramsNguyen Duc ThienAún no hay calificaciones
- Future Directions in Computer Science Research: John Hopcroft Department of Computer Science Cornell UniversityDocumento54 páginasFuture Directions in Computer Science Research: John Hopcroft Department of Computer Science Cornell UniversityAravind123Aún no hay calificaciones
- Graphs Topological Sort Single Source Shortest Path: Manoj Kumar DTU, DelhiDocumento25 páginasGraphs Topological Sort Single Source Shortest Path: Manoj Kumar DTU, DelhiAnkit PriyarupAún no hay calificaciones
- On Scale Independence For Querying Big Data: Wenfei Fan Floris Geerts Leonid LibkinDocumento12 páginasOn Scale Independence For Querying Big Data: Wenfei Fan Floris Geerts Leonid Libkinbenben08Aún no hay calificaciones
- Informed Search (A Search) Objectives:: Faculty of Engineering Sciences and TechnologyDocumento5 páginasInformed Search (A Search) Objectives:: Faculty of Engineering Sciences and TechnologyMUHAMMAD FAWADAún no hay calificaciones
- FADML 06 PPC Graphs and Traversals PDFDocumento47 páginasFADML 06 PPC Graphs and Traversals PDFarpan singhAún no hay calificaciones
- Present As IDocumento49 páginasPresent As IsmkbaburroyyanAún no hay calificaciones
- Dijkstra's Shortest Path Algorithm: Outline of This LectureDocumento30 páginasDijkstra's Shortest Path Algorithm: Outline of This LectureHIRAN KUMAR SINHAAún no hay calificaciones
- 2) Multi-Criteria 1) Contraction Hierarchies 3) For Ride SharingDocumento34 páginas2) Multi-Criteria 1) Contraction Hierarchies 3) For Ride Sharingmadan321Aún no hay calificaciones
- Dijkstras AlgorithmDocumento20 páginasDijkstras AlgorithmMahmoud Al-EwiwiAún no hay calificaciones
- Week05 Graph 1Documento69 páginasWeek05 Graph 1Edison Mamani RamirezAún no hay calificaciones
- Ai AssignDocumento44 páginasAi AssignthepussyehaterAún no hay calificaciones
- Session2 January19 2020 8amDocumento62 páginasSession2 January19 2020 8amTayyab KamalAún no hay calificaciones
- Approx CH SlidesDocumento39 páginasApprox CH Slidesmadan321Aún no hay calificaciones
- Solution of Data Structure ST-2 PDFDocumento21 páginasSolution of Data Structure ST-2 PDFharshitAún no hay calificaciones
- StarnetDocumento60 páginasStarnetSamet ÇiftçiAún no hay calificaciones
- Data StructrDocumento226 páginasData StructrJaimon JacobAún no hay calificaciones
- AI Lecture 5Documento15 páginasAI Lecture 5Hanoee AbdAún no hay calificaciones
- Average Distance of Some Chemical Structure GraphsDocumento23 páginasAverage Distance of Some Chemical Structure GraphsSamm SungAún no hay calificaciones
- Lda-The Gritty DetailsDocumento12 páginasLda-The Gritty DetailsJun Wang100% (1)
- 11095-PDF File-46418-2-10-20230915Documento23 páginas11095-PDF File-46418-2-10-20230915just readerAún no hay calificaciones
- New Bounds For The Distance Ramsey NumberDocumento9 páginasNew Bounds For The Distance Ramsey NumberGiovanny Liebe DichAún no hay calificaciones
- Characteristics of Fuzzy Petersen Graph and Platonic Graph With Fuzzy RuleDocumento7 páginasCharacteristics of Fuzzy Petersen Graph and Platonic Graph With Fuzzy RuleIJRASETPublicationsAún no hay calificaciones
- Inverse Non Split DominationDocumento7 páginasInverse Non Split Dominationchithu1234Aún no hay calificaciones
- Complexity Issues For Variants of Secure Domination in Block GraphsDocumento32 páginasComplexity Issues For Variants of Secure Domination in Block GraphsAtul PatelAún no hay calificaciones
- Dendrogramas Con RDocumento24 páginasDendrogramas Con RWR SalasAún no hay calificaciones
- Dr. Tarkeshwar Singh Department of Mathematics: Bits, Pilani - K. K. Birla Goa CampusDocumento13 páginasDr. Tarkeshwar Singh Department of Mathematics: Bits, Pilani - K. K. Birla Goa CampusUtkarsh VaishAún no hay calificaciones
- Dijkestra Algorithm PPT L-20Documento19 páginasDijkestra Algorithm PPT L-20Saket AnandAún no hay calificaciones
- Department of Computer Science & Engineering Practical File Subject: Artificial Intelligence Lab (BTCS 605-18) B. Tech - 6 Semester (Batch 2020-24)Documento28 páginasDepartment of Computer Science & Engineering Practical File Subject: Artificial Intelligence Lab (BTCS 605-18) B. Tech - 6 Semester (Batch 2020-24)Pankaj KumarAún no hay calificaciones
- Social Network Analysis Con Python PDFDocumento80 páginasSocial Network Analysis Con Python PDFPablo Loste RamosAún no hay calificaciones
- Lecture 4 Centrality MeasureDocumento83 páginasLecture 4 Centrality MeasureV Prasanna ShrinivasAún no hay calificaciones
- Relevance of A Document To A QueryDocumento10 páginasRelevance of A Document To A QueryarhipelagAún no hay calificaciones
- Finally, Let Us Put Things Into Perspective by Looking at Alternatives To Mapreduce. We Start With Dryad From MicrosoftDocumento40 páginasFinally, Let Us Put Things Into Perspective by Looking at Alternatives To Mapreduce. We Start With Dryad From MicrosoftShashi KumarAún no hay calificaciones
- Prims Algorithm On MSTDocumento22 páginasPrims Algorithm On MSTpremsk_09Aún no hay calificaciones
- Regression Analysis: D-0 Versus D-1, D-14, D-2, D-3, D-4, D-7Documento5 páginasRegression Analysis: D-0 Versus D-1, D-14, D-2, D-3, D-4, D-7Chetana DiduguAún no hay calificaciones
- Between PresentationDocumento21 páginasBetween Presentationmadan321Aún no hay calificaciones
- Discrete Applied Mathematics: John Mccoy, Michael A. HenningDocumento13 páginasDiscrete Applied Mathematics: John Mccoy, Michael A. HenningPrem Kishore.Ph.D.ScholarAún no hay calificaciones
- DFS PDFDocumento3 páginasDFS PDFSummrina KanwalAún no hay calificaciones
- Chapter Methodology - P3-OISP - UpdatedDocumento65 páginasChapter Methodology - P3-OISP - UpdatedHOÀNG PHẠM HUYAún no hay calificaciones
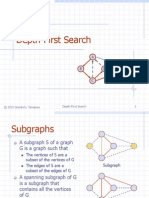
- © 2010 Goodrich, Tamassia Depth-First Search 1Documento14 páginas© 2010 Goodrich, Tamassia Depth-First Search 1muucoolAún no hay calificaciones
- 0021 - DimensionDocumento56 páginas0021 - DimensionHenry GarrettAún no hay calificaciones
- Dijkstras AlgorithmDocumento16 páginasDijkstras AlgorithmmansurAún no hay calificaciones
- Alco 2019 2 5 711 0Documento24 páginasAlco 2019 2 5 711 0รตวรรณ อรัญไสวAún no hay calificaciones
- The Directed Minimum-Degree Spanning Tree Problem: (Radha - Krishnan, Balaji - Raghavachari) @utdallas - EduDocumento12 páginasThe Directed Minimum-Degree Spanning Tree Problem: (Radha - Krishnan, Balaji - Raghavachari) @utdallas - EduNiken AndrianiAún no hay calificaciones
- 6.3.1 Gear Terms Lesson Rev3Documento19 páginas6.3.1 Gear Terms Lesson Rev3Deepak GirotraAún no hay calificaciones
- Prim's Algorithm: On Minimum Spanning TreeDocumento22 páginasPrim's Algorithm: On Minimum Spanning TreeJeasmine SultanaAún no hay calificaciones
- Question 1Documento3 páginasQuestion 1Mohanapriya KuppanAún no hay calificaciones
- The K-Distance Degree Index of Corona, Neighborhood Corona Products and Join of GraphsDocumento12 páginasThe K-Distance Degree Index of Corona, Neighborhood Corona Products and Join of GraphsIoan DegauAún no hay calificaciones
- 4 Solutions Clrs 22Documento8 páginas4 Solutions Clrs 22Abdullah SimpsonAún no hay calificaciones
- Search Algorithms in AI: Arti Cial IntelligenceDocumento12 páginasSearch Algorithms in AI: Arti Cial IntelligenceSasidhar JalduAún no hay calificaciones
- Elementary Graph Algorithms: Manoj Agnihotri M.Tech I.T Dept of CSE ACET AmritsarDocumento58 páginasElementary Graph Algorithms: Manoj Agnihotri M.Tech I.T Dept of CSE ACET Amritsarkshitij1993Aún no hay calificaciones
- Lecture 12 DijkstraDocumento39 páginasLecture 12 DijkstraMostafizur RahamanAún no hay calificaciones
- A Method For Ranking of Fuzzy Numbers Using New Area Method: January 2015Documento12 páginasA Method For Ranking of Fuzzy Numbers Using New Area Method: January 2015Hiro SigmaAún no hay calificaciones
- Geographic Information Systems for Geoscientists: Modelling with GISDe EverandGeographic Information Systems for Geoscientists: Modelling with GISCalificación: 1 de 5 estrellas1/5 (1)
- VPN Manual - Ubuntu - EngelskDocumento5 páginasVPN Manual - Ubuntu - Engelskmadan321Aún no hay calificaciones
- Time Table CH SlidesDocumento23 páginasTime Table CH Slidesmadan321Aún no hay calificaciones
- Dynamics of Youth Population - Impact of Education ExpenditureDocumento31 páginasDynamics of Youth Population - Impact of Education Expendituremadan321Aún no hay calificaciones
- Modular DesignDocumento41 páginasModular Designmadan321Aún no hay calificaciones
- Tata Family TreeDocumento1 páginaTata Family Treemadan321100% (1)
- Contraction of Timetable Networks With Realistic Transfers: Geisberger@kit - EduDocumento26 páginasContraction of Timetable Networks With Realistic Transfers: Geisberger@kit - Edumadan321Aún no hay calificaciones
- Time Table Ch2Documento16 páginasTime Table Ch2madan321Aún no hay calificaciones
- Unix Prog DesignDocumento7 páginasUnix Prog Designirs_bAún no hay calificaciones
- Efficient Routing in Road Networks With Turn Costs: Geisberger Christian - VetterDocumento12 páginasEfficient Routing in Road Networks With Turn Costs: Geisberger Christian - Vettermadan321Aún no hay calificaciones
- Transport Optimization Finland 2009Documento35 páginasTransport Optimization Finland 2009madan321Aún no hay calificaciones
- Approx CH SlidesDocumento39 páginasApprox CH Slidesmadan321Aún no hay calificaciones
- Route Planning With Flexible Objective FunctionsDocumento14 páginasRoute Planning With Flexible Objective Functionsmadan321Aún no hay calificaciones
- Time Dependent Many To ManyDocumento14 páginasTime Dependent Many To Manymadan321Aún no hay calificaciones
- Time-Dependent Contraction Hierarchies and ApproximationDocumento71 páginasTime-Dependent Contraction Hierarchies and Approximationmadan321Aún no hay calificaciones
- 2) Multi-Criteria 1) Contraction Hierarchies 3) For Ride SharingDocumento34 páginas2) Multi-Criteria 1) Contraction Hierarchies 3) For Ride Sharingmadan321Aún no hay calificaciones
- Time Dependent Contraction Hierarchies - Basic Algorithmic IdeasDocumento5 páginasTime Dependent Contraction Hierarchies - Basic Algorithmic Ideasmadan321Aún no hay calificaciones
- Time-Dependent Contraction Hierarchies and ApproximationDocumento12 páginasTime-Dependent Contraction Hierarchies and Approximationmadan321Aún no hay calificaciones
- Fast Detour Computation For Ride SharingDocumento12 páginasFast Detour Computation For Ride Sharingmadan321Aún no hay calificaciones
- Between PresentationDocumento21 páginasBetween Presentationmadan321Aún no hay calificaciones
- Compression of RDsDocumento7 páginasCompression of RDsmadan321Aún no hay calificaciones
- Heuristic Contraction Hierarchies With Approximation GuaranteeDocumento9 páginasHeuristic Contraction Hierarchies With Approximation Guaranteemadan321Aún no hay calificaciones
- Heuristic Contraction Hierarchies With Approximation GuaranteeDocumento7 páginasHeuristic Contraction Hierarchies With Approximation Guaranteemadan321Aún no hay calificaciones
- Fast Detour Computation For Ride Sharing: Robert Geisberger, Dennis Luxen, Sabine Neubauer, Peter Sanders, Lars VolkerDocumento5 páginasFast Detour Computation For Ride Sharing: Robert Geisberger, Dennis Luxen, Sabine Neubauer, Peter Sanders, Lars Volkermadan321Aún no hay calificaciones
- Alternative Routes TRDocumento10 páginasAlternative Routes TRmadan321Aún no hay calificaciones
- Naac - SSR - Rvrjcce-21022014Documento356 páginasNaac - SSR - Rvrjcce-21022014madan321Aún no hay calificaciones
- Algeng Workshop Google RoutingDocumento11 páginasAlgeng Workshop Google Routingmadan321Aún no hay calificaciones
- Expense RatiosDocumento24 páginasExpense Ratiosmadan321Aún no hay calificaciones
- Art. PHAST Hardware Accelerated Shortest Path TreesDocumento13 páginasArt. PHAST Hardware Accelerated Shortest Path TreesEdgar Cano FrancoAún no hay calificaciones
- Contraction Hierarchies: Faster and Simpler Hierarchical Routing in Road NetworksDocumento30 páginasContraction Hierarchies: Faster and Simpler Hierarchical Routing in Road Networksmadan321Aún no hay calificaciones
- Stochastic Route Planning For Electric VehiclesDocumento17 páginasStochastic Route Planning For Electric VehiclespartyindacityAún no hay calificaciones
- A Survey of Shortest-Path AlgorithmsDocumento26 páginasA Survey of Shortest-Path AlgorithmsRohithAún no hay calificaciones
- Cloud-Based Approximate Constrained Shortest Distance Queries Over Encrypted Graphs With Privacy ProtectionDocumento13 páginasCloud-Based Approximate Constrained Shortest Distance Queries Over Encrypted Graphs With Privacy ProtectionshahzadAún no hay calificaciones
- Programming Assignment 6 - Advanced Shortest PathsDocumento22 páginasProgramming Assignment 6 - Advanced Shortest PathsD OAún no hay calificaciones
- OSRMDocumento68 páginasOSRMJosé ArenillaAún no hay calificaciones
- Time Dependent Contraction Hierarchies - Basic Algorithmic IdeasDocumento5 páginasTime Dependent Contraction Hierarchies - Basic Algorithmic Ideasmadan321Aún no hay calificaciones