Documentos de Académico
Documentos de Profesional
Documentos de Cultura
GuiaTicLab1 2013
Cargado por
Cristian Ágreda AlvarezTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
GuiaTicLab1 2013
Cargado por
Cristian Ágreda AlvarezCopyright:
Formatos disponibles
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
IEE314 - Laboratorio de Tpicos de Instrumentaci n y Control
Periodo: 2013-2 (Rev. LGZ)
Laboratorio 1
Instrumentacin de Procesos
Industriales
1. OBJ ETIVOS
2. MATERIALES Y EQUIPOS
3.FUNDAMENTO TERICO
4. PRCTICA DE LABORATORIO
1. OBJETIVOS.
- Reconocer el proceso y la instrumentacin de cada Planta Modelo del Laboratorio de Control y
familiarizarse con sus diagramas P&ID.
- Comprender qu son y para qu sirven los elementos utilizados en un sistema de control.
- Observar y reconocer el funcionamiento de los principales sensores y actuadores que se
encuentran en el laboratorio.
2. MATERIALES Y EQUIPOS.
Plantas Modelo de control de procesos industriales (flujo, temperatura, nivel, presin).
03 Controladores Industriales.
01 Controlador Industrial PID de doble lazo.
04 Registradores Industriales.
04 Vlvulas Neumticas Proporcionales.
01 Sensor de Flujo.
02 Sensores de Temperatura (termocuplas).
01 Sensor de Nivel.
01 Sensor de Presin.
04 Transductores de Corriente (4-20 mA) a Presin (3-15 psi).
01 Compresor de aire (externo).
1
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
3. FUNDAMENTO TEORICO.
No es imaginable, en la actualidad, la existencia de una industria moderna sin un completo sistema
de instrumentacin y control. La medicin de los distintos parmetros que intervienen en un proceso
de fabricacin o transformacin industrial es bsica para obtener un control directo sobre los
productos y poder mejorar su calidad y competitividad. As pues, el conocimiento del funcionamiento
de los instrumentos de medicin y de control, y su papel dentro del proceso que intervienen, es
bsico para quienes desarrollan su actividad profesional dentro de este campo.
3.1 SISTEMAS DE CONTROL:
Un sistema es simplemente una combinacin de elementos relacionados entre s, necesarios
para realizar una o varias funciones que ninguno podra hacer por s mismo. Este concepto se
aplica no solamente a sistemas fsicos, como los encontrados en la industria, sino tambin a
fenmenos abstractos y dinmicos, como los sistemas econmicos, biolgicos, qumicos y
similares.
En el caso de un sistema de control, la funcin del mismo es mantener cualquier variable de
inters, digamos la velocidad de una mquina o la tasa de inflacin de un pas, dentro de unos
lmites determinados, o alterarla de una cierta manera deseada. Los sistemas de control
industriales estn enfocados principalmente al control de movimiento o de procesos.
Los sistemas de control de movimiento, conocidos tambin como servomecanismos o servos,
se utilizan para controlar el movimiento o posicin fsica de un objeto. Los controles de banda
transportadora son de este tipo. Otro ejemplo de servo es un brazo de robot industrial encargado
de soldar partes en una lnea de ensamblaje.
Los sistemas de control de procesos, por su parte, que son los ms comunes, se utilizan para
controlar procesos caracterizados por una serie de pasos o cambios graduales que se suceden
uno a continuacin de otro. Tambin la funcin del sistema de control es permitir el
mantenimiento y regulacin de variables del proceso como presin, caudal, temperatura, pH, etc.
3.2 ELEMENTOS DE UN SISTEMA DE CONTROL Y CONCEPTO DE LAZO CERRADO
Los sistemas de control constan de elementos funcionales similares que son el controlador del
sistema, los actuadores y los sensores. Tambin existen elementos auxiliares como los
controles del actuador y las unidades acondicionadoras de la seal del sensor (Figura 1)
Figura 1: Elementos de un sistema de control
2
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
El controlador del sistema proporciona la inteligencia para el sistema de control. Puede ser
un controlador lgico programable (PLC), un microprocesador, un microcontrolador, una
computadora anloga o digital, un juego de rels y/o contactores, etc. El controlador es el
cerebro del sistema.
Los actuadores o transductores de salida se comportan como los msculos del sistema de
control, convirtiendo la potencia elctrica, neumtica o hidrulica aplicada a ellos en alguna
forma de accin fsica. Ejemplos de actuadores son los motores, los frenos, los embragues, los
solenoides, los rels, las vlvulas y las bombas.
Los sensores o transductores de entrada actan como los sentidos de un sistema de
control, convirtiendo los parmetros a ser medidos, controlados o supervisados en seales
elctricas equivalentes que pueden ser interpretadas por el controlador. Existen sensores para
cada necesidad industrial, incluyendo la medicin de velocidad, posicin, peso, volumen,
tensin, temperatura, presin, humedad, etc.
Incluyendo el objeto a controlar o Planta, tenemos entonces los 4 elementos de cualquier
sistema de control:
- Planta o Proceso
- Controlador
- Actuador
- Sensor
Algo esencial en todo sistema de control automtico es el principio de retroalimentacin o lazo
cerrado, que permite dotar a una mquina de la capacidad de autocorreccin. Un lazo cerrado
en un sistema de control se puede implementar mediante un dispositivo mecnico, neumtico o
electrnico que detecta una magnitud fsica como una temperatura, un tamao o una
velocidad, la compara con una norma preestablecida, y realiza aquella accin preprogramada
necesaria para mantener la cantidad medida dentro de los lmites aceptables de la norma. El
principio de realimentacin se utiliza desde hace varios siglos. Un notable ejemplo es el
regulador de bolas inventado en 1788 por el ingeniero escocs J ames Watt para controlar la
velocidad de la mquina de vapor. El conocido termostato domstico es otro ejemplo de
dispositivo de realimentacin.
Figura 2: Un termostato emplea un bucle de realimentacin (flechas rojas) para
controlar la temperatura de una habitacin, compara la temperatura deseada con la
temperatura real y enva las instrucciones pertinentes a la caldera. Mediante
repeticiones continuas de este bucle de realimentacin, se alcanzar y mantendr la
temperatura deseada.
3
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
En la fabricacin y en la produccin, los lazos de retroalimentacin requieren la determinacin
de lmites aceptables para que el proceso pueda efectuarse; que estas caractersticas fsicas
sean medidas y comparadas con el conjunto de lmites, y que el sistema de realimentacin sea
capaz de corregir el proceso para que los elementos medidos cumplan la norma. Mediante los
dispositivos de retroalimentacin las mquinas pueden ponerse en marcha, pararse, acelerar,
disminuir su velocidad, contar, inspeccionar, comprobar, comparar y medir. Estas operaciones
suelen aplicarse a una amplia variedad de operaciones de produccin, por ejemplo el fresado,
el embotellado y el refinado.
El advenimiento del ordenador o computadora ha facilitado enormemente el uso de lazo de
retroalimentacin en los procesos de fabricacin. En combinacin, las computadoras y los
lazos de reatrolimentacin han permitido el desarrollo de mquinas controladas numricamente
y centros de maquinado (mquinas herramientas que pueden realizar varias operaciones de
maquinado diferentes).
La aparicin de las combinaciones de microprocesadores y computadoras ha posibilitado el
desarrollo de la tecnologa de diseo y fabricacin asistidos por computadora (CAD/CAM).
Tenemos como ejemplo, el control de rumbo de un automvil. En este caso el objeto de control
o Planta es el automvil, ya que contiene la variable (rumbo) que se requiere mantener en un
valor deseado. Cuando un humano controla esta planta, necesita ver si est en el rumbo
correcto o no. Para esto, utiliza el sentido de la vista. Esta informacin es enviada al
cerebro, en el que se toma la decisin de corregir el rumbo o mantenerlo; en el caso de
corregir el rumbo, evala en qu direccin y en qu magnitud. Sin embargo, el cerebro por s
mismo no puede corregir el rumbo. Es as, que ordena a los msculos de la mano que
muevan el timn para realizar la correccin.
Este ciclo se repite varias veces por segundo, lo que asegura que siempre se mantenga el
rumbo deseado. Si queremos que una mquina realice el mismo proceso, tenemos que hacer
los siguientes reemplazos:
Sentido de la vista Sensor
Cerebro Controlador
Msculos de la mano Actuador.
Sensor Controlador Actuador
Estos son los elementos bsicos de todo lazo cerrado de control o lazo retroalimentado. El
flujo de informacin en un lazo cerrado de control se puede esquematizar mediante el
diagrama de bloques que se muestra en la Figura 3. Para el caso del ejemplo anterior (control
de rumbo de un automvil), la variable que se quiere mantener en un punto deseado es el
rumbo del automvil. Entonces, es necesario utilizar un sensor de posicin que lea la variable
de inters conocida tambin como variable de proceso (PV). La posicin actual (PV) se resta
de la posicin deseada o Set Point (SP), lo que permite conocer el error que actualmente tiene
el rumbo. Este error ingresa a un algoritmo de control, el cual es un software de
computadora que calcula la seal de correccin de rumbo o variable de control (CV).
4
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
Si el error es cero, el rumbo es correcto y no se enva ninguna seal de correccin. Si el error
no es cero, el controlador calcula la magnitud de la variable de control y esta seal se enva al
actuador. En este ejemplo sera algn dispositivo conectado directamente al sistema de
direccin del automvil. Como se explic anteriormente, este ciclo se repite varias veces por
segundo, lo que asegura que el sistema se mantenga en el rumbo correcto.
Figura 3: Diagrama de Flujo de un Sistema de Control. Aqu se muestra el flujo
de informacin existente entre los distintos elementos del sistema de control.
3.2.1 SENSORES
Los sensores son, en general, dispositivos que transforman una cantidad fsica cualquiera, por
ejemplo la temperatura, en otra cantidad equivalente, digamos desplazamiento mecnico.
Tambin pueden ser empleados para medir o detectar propiedades qumicas y biolgicas.
Asimismo la salida no siempre es una seal elctrica. Por ejemplo, muchos termmetros
utilizan como sensor una placa bimetlica formada por dos metales con diferente coeficiente
de dilatacin, la cual produce un desplazamiento (seal mecnica) proporcional a la
temperatura (seal trmica).
En el presente laboratorio estudiaremos sensores elctricos que son aquellos cuya salida es
una seal elctrica de corriente o de voltaje, codificada en forma analgica o digital, ya que
estos constituyen el principal medio de enlace entre los procesos industriales y los circuitos
electrnicos encargados de controlarlos y monitorearlos.
ESTRUCTURA Y PRINCIPIO DE FUNCIONAMIENTO
Todos los sensores utilizan uno o ms principios fsicos o qumicos para convertir una variable
de entrada al tipo de variable de salida ms adecuado para el control o monitoreo de cada
proceso particular. Estos principios o fenmenos se manifiestan de forma til en ciertos
materiales o medios y pueden estar relacionados con las propiedades del material en s o su
disposicin geomtrica.
Todos los sensores utilizan uno o ms principios fsicos o qumicos llamados principios de
transduccin para convertir una variable de entrada al tipo de una variable de salida ms
adecuado para el monitoreo de cada proceso particular (Figura 4).
Figura 4:
Estructura genrica de un sensor, el cual puede utilizar uno o ms principios de transduccin con el fin
de producir una salida til en respuesta a la cantidad, propiedad o condicin fsica que se desee medir.
5
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
En el caso de sensores cuya salida es una seal elctrica, la obtencin de sta ltima, implica
generalmente el uso de un transductor primario y, opcionalmente, uno o ms transductores
secundarios, como se ilustra en la Figura 4.
La funcin del transductor primario, es convertir la magnitud fsica a medir en otra ms fcil de
manipular. sta ltima no tiene que ser necesariamente de naturaleza elctrica.
Por ejemplo, un bimetal, que es un dispositivo formado por dos metales de distintos
coeficientes de dilatacin, es un tipo de transductor primario, porque convierte una variacin de
temperatura en un desplazamiento fsico equivalente. Esto ltimo puede ser utilizado para
mover una aguja o accionar un interruptor. Otros ejemplos son los tubos de Bourdon (presin),
los tubos de Pitot (velocidad de flujo), los rotmetros (caudal), los flotadores (nivel), las
termocuplas (temperatura), etc.
El transductor o transductores secundarios cuando son requeridos, actan sobre la salida del
transductor primario para producir una seal elctrica equivalente. Una vez obtenida, sta
ltima es sometida a un proceso de acondicionamiento y amplificacin para ajustarla a las
necesidades de la carga exterior o de la circuitera de control.
Como ejemplo considrese el sensor de presin mostrado en la Figura 5. En este caso, la
presin asociada con el fluido se traduce inicialmente en un desplazamiento o deflexin
proporcional utilizando como transductor primario un diafragma u otro elemento elstico
especialmente diseado para esta funcin.
A continuacin, esta deflexin es convertida en una seal elctrica equivalente utilizando como
transductor secundario una galga extensiomtrica semiconductora u otro tipo de elemento
especialmente diseado para convertir movimiento en electricidad.
Por ltimo, la seal elctrica producida se acondiciona, modifica o procesa mediante circuitos
electrnicos adecuados con el fin de obtener la respuesta y las caractersticas finales
deseadas (en este caso un voltaje entre 0 y 5 voltios proporcional a valores de presin
absoluta entre 0 y 6000 psi con una exactitud de 0.5%).
Figura 5: Estructura interna de un sensor de presin absoluta para trabajo pesado.
El dispositivo mostrado fabricado por Gems (www.gemssensors.com) y capaz de
detectar presiones desde 0 (vaco) hasta 6000psi, utiliza un diafragma como
transductor primario, una galga extensiomtrica semiconductora (CVD) como
transductor secundario y un circuito integrado de aplicacin especfica (ASIC)
como bloque de tratamiento de seal.
6
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
TIPOS DE SENSORES
Desde un punto de vista terico, tanto la entrada como la salida de un sensor puede ser una
combinacin cualquiera de los siguientes seis tipos bsicos de variables existentes en la
naturaleza:
Variables mecnicas: Longitud, flujo msico, fuerza, velocidad, posicin, etc.
Variables trmicas: Temperatura, calor, entropa, flujo calrico, etc.
Variables elctricas: Voltaje, corriente, carga, resistencia, inductancia, etc.
Variables magnticas: Intensidad de campo, densidad de flujo, etc.
Variables pticas: Intensidad, longitud de onda, polarizacin, fase, etc.
Variables qumicas o moleculares: Composicin, concentracin, pH, olor, etc.
Los sensores preferidos son aquellos que ofrecen una seal de salida elctrica. Esto se debe a
las numerosas ventajas que proporcionan los mtodos electrnicos para el control y medicin
de procesos.
Los sensores pueden ser clasificados de diferentes maneras. Una clasificacin muy importante
es segn el tipo de seal de salida que enva:
Analgicos: Los sensores analgicos entregan como salida un voltaje o una corriente
continuamente variable dentro del campo de medida especificado. Los rangos de voltaje de salida
mas usuales son: +10V, +5V, 10V, 5V y 1V; los rangos corriente de salida estn mas
estandarizados, siendo actualmente el mas comn el de 4 a 20 mA, donde 4mA corresponde a cero
de la variable medida y 20 mA a la escala plena.
Digitales: Los sensores digitales entregan como salida un voltaje o corriente variable en forma de
saltos o pasos discretos de manera codificada (entregan directamente bytes o palabras). Esta
caracterstica es muy importante ya que les permite interactuar con un microcontrolador o un
ordenador, como lo haran dos ordenadores conectados en red. Esta es la caracterstica principal
de los denominados sensores inteligentes.
Todo o nada: Estos tienen una salida digital codificada de slo dos estados y nicamente indican
cundo la variable detectada rebasa un cierto valor umbral o lmite. Es un caso especial de
sensores digitales. Estos sensores, hasta hace algunos aos, eran los ms comunes y se
encontraban en el hogar en forma de termostatos (terma, refrigeradora, etc.), sensores de presencia
(activa o desactiva la luz interior de un automvil, refrigeradora, etc.).
Dependiendo de la naturaleza de la magnitud o variable a detectar, los sensores se pueden
clasificar en: sensores de temperatura, presin, caudal, humedad, posicin, velocidad,
aceleracin, vibracin, fuerza, torque, flujo, corriente, gases, pH, proximidad, contacto, imagen,
etc.
A continuacin se explica el principio de funcionamiento de los principales sensores utilizados
en la industria, en especial aquellos que se vern en la presente prctica. Se revisarn los
sensores de proximidad, de presin, de nivel, de temperatura, flujo, as como el
acondicionamiento de la seal del sensor.
SENSORES DE PROXIMIDAD
Son sensores que detectan la presencia o ausencia de un objeto dentro de un rea de
influencia, sin entrar en contacto fsico con l y entregan como respuesta una seal binaria del
tipo todo o nada equivalente a un contacto abierto o cerrado.
Los detectores de proximidad electrnicos son ampliamente usados en servomecanismos y
sistemas de control de procesos debido, entre otras razones, a que pueden operar a muy altas
velocidades, no necesitan de estar en contacto fsico con el objeto que detectan, no tienen
piezas mviles, no se desgastan, pueden trabajar en ambientes hostiles, tienen una larga vida
7
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
til, pueden detectar objetos muy frgiles y delicados, son compatibles con PLCs, etc.
Como ejemplo de aplicaciones podemos mencionar:
Verificar cuando una parte de una mquina ha alcanzado cierta posicin.
Verificar la colocacin apropiada de partes durante un procedimiento de ensamblaje
en lnea.
Contar el nmero de objetos que son transferidos a una banda transportadora.
Determinar la presencia, el tamao, el color, el contenido, la alineacin u otra
caracterstica particular de un producto que pasa por un punto de inspeccin.
Contar los dientes de un engranaje o medir las revoluciones de un eje para
determinar la velocidad rotacional de una mquina o parte de ella.
Los detectores de proximidad ms comunes son los inductivos, los capacitivos y los pticos. A
continuacin se describirn cada uno de ellos:
Sensores de Proximidad Inductivos: Se utilizan para detectar la presencia de objetos
metlicos. Cuando se ubica un objeto metlico dentro del campo magntico del sensor se inducen
corrientes elctricas activando el sensor. Los objetos no metlicos no inducen corriente alguna, es
por ello que no son detectados.
Sensores de Proximidad Capacitivos: Se utilizan tanto para detectar objetos metlicos o no
metlicos. Cuando un objeto no metlico entra al campo elctrico del detector, la capacitancia
aumenta mientras que si el objeto es metlico, la capacitancia disminuye. Ambos hacen variar el
estado del sensor logrando su activacin. La sensibilidad de este tipo de sensor depende del tipo de
material a detectar, de la temperatura y la humedad ambientales, por ello deben ajustarse para
cada material y situacin particular. Este tipo de sensor es empleado principalmente para sensar
objetos no metlicos, tiene un mayor alcance que los detectores inductivos y puede sensar a travs
de paredes.
Sensores de Proximidad pticos: Son dispositivos electrnicos que pueden abrir o cerrar un
circuito elctrico por la accin de un haz de radiacin electromagntica visible o no, y un elemento
fotosensible. Garantizan una gran inmunidad a otras formas de radiacin ambientales, un alto
rendimiento luminoso, una alta velocidad de respuesta, la insensibilidad a choques y vibraciones, y
una vida til prcticamente ilimitada.
SENSORES DE PRESIN
Estos sensores detectan presin y la convierten inicialmente en movimiento
mediante transductores primarios especialmente diseados y construidos
para producir una deflexin proporcional a la presin aplicada, luego esta
deflexin (movimiento) es convertida en una seal elctrica equivalente
utilizando galgas extensiomtricas, potencimetros u otros tipos de
transductores secundarios. As, la presin se convierte en movimiento, y el
movimiento en seal elctrica. En la Figura 6 se muestran algunos
elementos mecnicos comnmente utilizados en los sensores de presin
para convertir presin en movimiento. Los tubos de Bourdon, por ejemplo,
son tubos metlicos curvados, abiertos en un extremo y sellados en el otro,
con una seccin transversal ovalada. El fluido cuya presin se desea medir
ingresa por el extremo abierto, anclado mecnicamente. Como resultado,
aparece una fuerza en el extremo sellado que causa la deflexin del tubo.
Los diafragmas, por su parte, utilizan un material flexible plano, con un lado
expuesto a la presin del proceso, y el otro a una presin de referencia. El
diafragma se dobla hacia el lado de ms baja presin.
8
Sensor de presin
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
Figura 6: Configuraciones tpicas de transductores primarios
utilizados en sensores de presin.
En ambos casos, el movimiento mecnico resultante puede ser transmitido al ncleo de un
LVTD, o al cursor de un potencimetro, para convertirlo a una seal elctrica.
Los sensores de presin pueden ser de varios
tipos dependiendo de la tecnologa utilizada para
convertir la informacin del transductor primario en
una seal elctrica. Desde este punto de vista, se
habla de transductores potenciomtricos,
inductivos, capacitivos, piezoelctricos, de galgas,
piezorresistivos, micro mecnicos, etc. Los
sensores de presin potenciomtricos, como el
mostrado en la Figura 7, por ejemplo, utilizan un
tubo de Bourdon, una cpsula o un fuelle para
impulsar un cursor sobre un elemento resistivo.
Son relativamente econmicos y se utilizan en
aplicaciones de bajo perfil, por ejemplo medidores
de presin de aceite de vehculos.
Los sensores de presin inductivos utilizan el
movimiento del transductor primario para accionar
el ncleo de una bobina o un transformador para
variar la inductancia o el acoplamiento inductivo
entre el primario y el secundario. En la Figura 8 se
muestra como ejemplo la estructura interna de un
sensor de presin inductivo que utiliza un LVDT
accionado por una cpsula.
Los sensores de presin capacitivos, como el
mostrado en la Figura 9, utilizan un transductor tipo
diafragma como una de las placas de un
condensador. Al aplicar una presin, el diafragma
Figura 7: Estructura de un sensor de
presin potenciomtrico.
Figura 8: Estructura de un sensor de
presin inductivo con LVDT
9
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
se deflecta y vara la capacitancia. Este cambio, se
aprovecha para controlar la frecuencia de un oscilador o el
acoplamiento de una seal AC a travs de una red, y
transmitirse en forma de una seal elctrica.
Los sensores de presin piezoelctricos, como el mostrado
en la Figura 10, utilizan una lmina metalizada de cuarzo o
material cermico, para convertir la fuerza transmitida por un
diafragma en una seal elctrica peridica, generalmente
una onda seno o un tren de pulsos. Se emplean
principalmente para medir presiones variables, y se
caracterizan por su excelente estabilidad trmica.
Figura 9: Estructura de un sensor
Los sensores de presin de galga extensiomtrica, como
de presin capacitivo.
el mostrado en la Figura 11, utilizan un diafragma que se
deflecta proporcionalmente a la presin aplicada y una
galga o puente de galgas, adheridas a l que varan su
resistencia de acuerdo a la magnitud de la fuerza
resultante. Tanto el diafragma como las galgas pueden ser
de material metlico o semiconductor, siendo esta ltima
la opcin ms utilizada en la actualidad. Estas galgas, que
son mucho ms sensibles que las metlicas, se
denominan piezorresistores y constituyen el ncleo de los
sensores de presin piezorresistivos modernos. El efecto
piezorresistivo es el principio de transduccin de presin
estndar adoptado por la industria semiconductora.
Tpicamente hay cuatro piezorresistores dentro del rea
Figura 10: Sensores de presin
del diafragma de un sensor piezorresistivo, y los mismos
piezoelctricos.
estn interconectados formando un puente de
Wheatstone, con dos de ellos sometidos a tensin
tangencial y los otros dos a tensin radial.
Los sensores de presin micromecanizados como el
mostrado en la Figura 12, consisten bsicamente de una
delgada estructura tipo puente de galgas, aislada
trmicamente y suspendida sobre una cavidad hecha en el
silicio a travs de la cual pasa el fluido. Se utilizan para
mediciones de baja presin en aplicaciones donde puede
tolerarse un pequeo flujo a travs del elemento, por
ejemplo, sistema HVAC o de calefaccin, ventilacin y Figura 11: Sensor de presin
aire acondicionado.
piezoelctrico de galgas
Tambin se dispone de interruptores de presin, los
extensiomtricos con un rango de
0 a 5000psi.
cuales permutan el estado de uno o ms contactos
cuando la presin medida alcanza un nivel
predeterminado o Set Point. Este cambio de estado puede
ser utilizado, por ejemplo, para sealizar un circuito lgico,
un microcontrolador, un PLC, etc., o energizar
directamente un actuador, digamos una electrovlvula,
una bomba de vaciado, un compresor, etc.
Actualmente la tendencia es hacia los sensores de presin
inteligentes, los cuales, adems de los bloques
funcionales bsicos ofrecen otras caractersticas
avanzadas, incluyendo la indicacin digital directa del
valor de la presin y la posibilidad de ser programados por
el usuario a la medida de sus necesidades. Figura 12: Estructura de un sensor
de presin piezorresistivo
i i d
10
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
SENSORES DE NIVEL
Los transductores de nivel, Figura 13, como su nombre lo indica detectan o miden nivel, es
decir la altura a la cual un material llena un tanque, una tolva, un silo, un bolsillo, una bodega,
u otro tipo de contenedor. El material puede ser un lquido o un producto slido en forma de
polvo, granos, hojuelas, etc.
Figura 13: Transductores de nivel tipo flag (a) de flotador (b,i) ultrasnicos (c,e)
capacitivos (d,j) vibratorios (h) pticos (f) y de montaje lateral (g).
El nivel se mide localizando la
frontera o interfase entre dos
medios, digamos un lquido o un
polvo en contacto con el aire en un
tanque abierto, o una capa de
aceite flotando sobre agua, Figura
14. Esta medicin puede hacerse
por mtodos directos, por ejemplo
utilizando un flotador; o por
mtodos indirectos, digamos
midiendo la presin en el fondo de
un tanque.
Los mtodos directos son
generalmente invasivos, es decir,
implican un contacto directo del
sensor con el material a medir,
mientras que los mtodos
indirectos son tpicamente no
invasivos. Estos ltimos son los
preferidos cuando se trabaja con
materiales corrosivos, peligrosos o
sometidos a altas temperaturas o
altas presiones.
Figura 14: El nivel se mide localizando la interfase entre dos
medios. En este caso, se usa un sensor de nivel capacitivo
para medir la altura de las columnas de agua y de aceite. La
emulsin que se forma entre ambos medio acta como capa
fronteriza.
Las mediciones de nivel pueden ser tambin puntuales o continuas, dependiendo
respectivamente, de si la deteccin de la interfase se realiza en puntos especficos o a travs
de todas las posiciones posibles dentro de un rango dado. La deteccin puntual es la
11
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
requerida, por ejemplo, para marcar los lmites inferior y superior de llenado de un tanque y
alertar as cuando el mismo necesita ser rellenado o se ha desbordado.
Actualmente se dispone de una gran variedad de tecnologas de transductores que miden y
detectan nivel puntual o continuo de manera directa o indirecta y permiten la implementacin
de sistemas de control automtico. Los ms comunes son los basados en flotadores y efectos
vibratorios, de desplazamiento, conductivos, pticos, capacitivos y ultrasnicos; as como los
basados en la medicin de presin, peso, temperatura y otras variables indirectas.
SENSORES DE TEMPERATURA
La temperatura es una variable crtica utilizada para controlar la calidad de los productos en
muchos procesos industriales. Estos requieren un control preciso para obtener productos de
calidad o prevenir sobrecalentamientos, rupturas, explosiones y otros tipos de problemas. Las
temperaturas elevadas son necesarias para ablandar metales y fundir plsticos antes de ser
moldeados en formas especficas. Asimismo, las bajas temperaturas son necesarias para
conservar los productos perecederos en una industria procesadora de alimentos.
En el mercado existen diferentes tipos de sensores de temperatura, como son los sensores
bimetlicos, termorresistivos, termoelctricos, monolticos, piroelctricos. En la presente gua
explicaremos brevemente el principio de funcionamiento de las termocuplas y de los RTD.
Termocuplas o termopares: Son transductores de temperatura constituidos por dos alambres
conductores hechos de metales diferentes y soldados por uno de sus extremos formando una unin
(Figura 15). Al calentar esta ltima (unin de medida) se produce en el otro extremo de la
termocupla (unin fra) un voltaje proporcional a la diferencia de temperaturas entre las uniones. La
unin fra debe estar a una temperatura de referencia, generalmente 0C. Este efecto se conoce
como efecto termoelctrico o Seebeck. Los elementos de los termopares se fabrican a base de
metales y aleaciones metlicas especiales, como platino, hierro, cobre, rodio, renio, tungsteno,
cromel (90% Ni, 10% Cr), constantn (57% Cu, 43% Ni), alumenl (94% Ni, 2% Al, 3% Mn, 1% Si),
nicrosil (Ni-Cr-Si), nisil (Ni-Si-Mg), etc. Los mismos estn protegidos mediante una funda o cubierta
metlica, generalmente de acero inoxidable, cuyo espesor determina la velocidad de respuesta y la
robustez de la sonda.
Figura 15: Esquema de una termocupla industrial.
Detectores de Temperatura Resistivos (RTD): Son dispositivos basados en la variacin
normal que experimenta la resistencia de un conductor metlico puro con la temperatura, como
resultado del cambio de su resistividad y sus dimensiones. Esta variacin es directa, es decir, que si
la temperatura aumenta o disminuye, la resistencia tambin aumenta o disminuye en la misma
proporcin. Todos los metales puros exhiben este comportamiento. Sin embargo, no existen dos
metales con el mismo coeficiente de temperatura. Por tanto, una vez conocidas las propiedades de
un metal, puede ser establecida una curva de resistencia vs. temperatura nica para l.
12
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
SENSORES DE FLUJO
Los sensores de flujo detectan y miden la transferencia de materiales de un sitio a otro a travs
de tuberas, mangueras, canales, bandas transportadoras, conductos abiertos y cerrados, etc.
Los sensores de flujo se denominan comnmente caudalmetros y los principales son:
Caudalmetros electromagnticos: La ley de Faraday establece que la tensin inducida travs
de cualquier conductor que se mueve dentro de un campo magntico, es proporcional a la
velocidad del conductor, como se muestran en la Figura 16. Este principio es el usado por los
medidores de caudal magnticos, donde, el conductor es el lquido y la tensin generada en el
conductor es captada por dos electrodos rasantes en la superficie interior del tubo. Este tipo de
sensores se utilizan generalmente con fluidos difciles y corrosivos, as como con emulsiones,
cidos, aguas residuales, detergentes, comidas lquidas, etc.
Figura 16: Principio de funcionamiento del caudalmetro electromagntico.
Caudalmetros de presin diferencial: Se utilizan para medir el flujo de fluidos a travs de
tuberas (Figura 17). En la tubera se interpone una placa con un orificio de tamao y forma
especfica cuya funcin es la reducir el rea a travs de la cual circula el lquido para cambiar su
velocidad y crear as una diferencia de presin a ambos lados de la placa. Esta presin puede ser
medida con un sensor de presin diferencial y usada para calcular la velocidad del fluido, Esta
velocidad es multiplicada por el rea de la seccin de tubera y por un factor de correccin
obtenindose as el caudal volumtrico.
13
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
Caudalmetro de rea variable o rotmetro: Consiste de un tubo cnico provisto en su interior
de un pistn el cual es arrastrado por el fluido (Figura 18). En este tipo de sensor se mantiene
constante la diferencia de presin a ambos lados del pistn y se vara la seccin de paso del fluido.
La posicin del pistn puede ser leda con sensores pticos o magnticos. Si la lectura se realiza
directamente en una escala graduada en el tubo no se le llama sensor sino slo indicador de flujo.
Figura 18: Principio de funcionamiento de un rotmetro.
ACONDICIONADORES DE SEAL
Los circuitos de acondicionamiento hacen prcticas las seales de salida de los sensores y,
por tanto, juegan un papel clave en los sistemas de control, medida y adquisicin de datos
utilizados en la industria. Los acondicionadores de seal son elementos de un sistema de
control que ofrecen, a partir de una seal de salida del sensor electrnico, una seal apta para
ser presentada, registrada o procesada mediante un equipo o instrumento estndar;
generalmente un sistema de adquisicin de datos, un controlador lgico programable o una
computadora. Estos generalmente estn conformados por circuitos electrnicos que realizan
funciones especficas y generales como compensacin, amplificacin, filtrado, adaptacin de
impedancias, modulacin, demodulacin, aislamiento, multiplexaje, etc. La mayora de
sensores reales generan seales que deben ser previamente acondicionadas para poderlas
procesar de una manera exacta y confiable.
3.3.2 ACTUADORES
Los actuadores o accionamientos son una parte muy importante en los sistemas de control
industriales puesto que son los encargados de regular finalmente la potencia de la planta o
proceso, as como de amplificar las seales de mando de la misma. En esta seccin haremos
especial nfasis en los servomotores y en los motores paso a paso, utilizados principalmente
como pre-actuadores en procesos industriales.
Los actuadores ms comnmente utilizados en aplicaciones industriales son los destinados a
producir movimiento (motores y cilindros), transvasar fluidos (bombas y vlvulas) y manipular
calor (hornos, intercambiadores, etc.). Los actuadores pueden ser bsicamente de cuatro tipos
como veremos a continuacin.
14
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
Actuadores elctricos: rels, contactores, servomotores y motores paso a paso.
Actuadores hidrulicos y neumticos: Vlvulas, servovlvulas, cilindros, ventosas de
sujecin por vaco y bombas centrfugas.
Actuadores trmicos: hornos y sistemas de enfriamiento.
A continuacin estudiaremos algunos tipos de actuadores frecuentes en la industria.
ACTUADORES ELCTRICOS
Los actuadores elctricos ms utilizados son los motores. Entre las ventajas que presentan
tenemos: no necesitan de instalacin neumtica, mnimo consumo elctrico, menores costos
de instalacin y mantenimiento, no necesitan convertidor ya que trabajan directamente con
seales elctricas. Las desventajas son su elevado precio, necesitan de proteccin elctrica,
riesgo a explosin, menor potencia especfica, mas lentos que los neumticos. A continuacin
veremos las principales clases de motores y su uso industrial:
Servomotores
Este trmino se emplea para definir cualquier tipo de motor
que en un sistema de lazo cerrado utilice una seal de
realimentacin para monitorear su velocidad o posicin.
Los servomotores pueden ser AC o DC, operan con bajos
niveles de potencia, y estn especialmente diseados para
proporcionar el gobierno preciso de la posicin o la
velocidad de objetos en sistemas de control de
movimiento.
Los servomotores DC operan en forma similar a los
motores DC de excitacin independiente convencionales,
excepto que sus caractersticas constructivas,
principalmente la forma del rotor, Figura 19, son
ligeramente diferentes con el fin de obtener un
comportamiento dinmico rpido y estable, as como un
par de arranque importante. Pueden ser de rotor bobinado,
de bobina mvil, o sin escobillas.
Figura 19: Formas constructivas
del rotor en servomotores de DC.
Motores Paso a Paso
Son dispositivos que convierten comandos
digitales en movimientos incrementales de
exactitud conocida, es decir se mueven en
pasos discretos. Puesto que la marcha a
pasos (stepping) ocurre en estricta
concordancia con los comandos digitales de
entrada proporcionados, la posicin final del
eje es muy precisa y siempre la misma para
el mismo comando digital.
Figura 20: Seccin transversal de un motor
paso a paso hbrido.
15
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
ACTUADORES NEUMTICOS
Un actuador neumtico es un dispositivo que convierte la presin de un gas en un movimiento
mecnico. Suelen tener instalados dos sensores magnticos para la deteccin de la posicin
del mbolo en su interior. Los principales dispositivos finales dentro de un sistema neumtico
pueden ser lineales o rotatorios. Tambin se tienen los dispositivos neumticos utilizados para
accionar las vlvulas de control.
Actuadores Neumticos Lineales,
Tambin denominados cilindros, son los ms utilizados a nivel industrial, poseen una pieza
central denominada pistn que recibe la presin del aire por una de sus caras, hacindolo
desplazar en forma lineal. Estos pueden ser de simple efecto o de doble efecto.
Los cilindros de simple efecto poseen una sola entrada de aire, por lo cual la accin provocada
por la presin del gas es solo en un sentido. Tiene un resorte para retornar a su posicin
normal.
Los cilindros de doble efecto tienen dos entradas para el aire a presin. Cuando se le inyecta
aire por una de ellas, la otra funciona como salida, evacuando el aire que estaba dentro del
cilindro.
Actuadores Neumticos Rotatorios
Este tipo de actuador no es tan comn como los cilindros. En estos actuadores la presin del
aire es convertida en torque o fuerza de rotacin.
Actuadores de Vlvulas de control
Realizan la funcin de mover una vlvula segn a una posicin deseada, con el objeto de
variar el caudal del fluido de control que modifica a su vez el valor de la variable medida.
Dentro del bucle de control tiene tanta importancia como el elemento primario, el transmisor y
el controlador. En el laboratorio contamos con vlvulas accionadas por un diafragma
neumtico con resorte que trabaja entre 3 a 15 psig, es decir, que las posiciones extremas de
la vlvula corresponden a 3 y a 15 psig. Al aplicar una cierta presin sobre el diafragma, el
resorte se comprime de tal modo que el mecanismo empieza a moverse y sigue movindose
hasta que se llega a un equilibrio entre la fuerza ejercida por la presin del aire sobre el
diafragma y la fuerza ejercida por el resorte.
VLVULA NEUMTICA DE CONTROL VLVULA TOTALMENTE CERRADA
Y VLVULA TOTALMENTE ABIERTA
16
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
Idealmente con una seal de 3 psi la vlvula debe estar en la posicin cero de su carrera y para
una seal de 15 psi en la posicin 100. Asimismo debe existir una proporcionalidad entre las
seales intermedias y sus correspondientes posiciones. En la prctica las vlvulas de control se
desvan de este comportamiento debido a las siguientes causas: rozamientos, falta de linealidad
en el resorte, rea variable del obturador, etc.
3.3.3 CONTROLADORES
Son los procesadores inteligentes los cuales reciben los datos de entrada captados por los
sensores, los procesan y entregan datos de respuesta que son ejecutados por los actuadores.
Autmatas o PLCs.
Los controladores lgicos programables son dispositivos electrnicos de procesamiento que
poseen entradas y salidas de diferentes tipos de seal, su funcionamiento depende de un
programa que se le ha introducido previamente, con el cual se ejecuta cierta secuencia en forma
completamente automtica.
Microcontroladores
Son dispositivos electrnicos pequeos, en los cuales es posible programar acciones
determinadas para implementar desde sistemas automticos sencillos hasta sistemas complejos.
Todo depende de las caractersticas del proceso a automatizar.
Controladores PID
Es uno de los dispositivos ms usados en todo el mundo para controlar procesos o sistemas. Estos
dispositivos llevan a cabo una accin de correccin PID (Proporcional, Integral y Derivativa) que es
un algoritmo matemtico que se aplica sobre el error (diferencia entre la variable medida y el valor
deseado) al cual lo amplifica, lo integra y lo deriva. El resultado obtenido es la seal que se
introducir al actuador para minimizar el error y obtener una respuesta lo ms rpida posible ante
perturbaciones externas.
Control por Computadora
Las computadoras tambin estn incluidas en el control y supervisin de procesos industriales.
Con ellos se obtiene informacin completa de determinado proceso y a la vez se ejecutan labores
automticas que prescinden de la intervencin del hombre.
4. Representacin de Procesos Industriales: Diagramas P&ID.
La instrumentacin industrial estudia los equipos utilizados para la automatizacin de procesos
industriales. La integracin de los equipos (sensores, actuadores, controladores y elementos
auxiliares) se representa grficamente mediante diagramas P&ID (diagramas de tuberas e
instrumentacin) en donde se utilizan smbolos normados por ISA (Sociedad de Instrumentistas de
Amrica).
Los diagramas de tuberas e instrumentacin (P&ID) nos sirven para tener un claro entendimiento
del proceso. Sin embargo, a pesar de que es comn de que en los diagramas P&ID, sobre las lneas
que corresponden a las tuberas se proporcione informacin sobre las mismas (como dimetro,
nombre, material, fluido que transportan, aislamiento, etc), estos diagramas no se puede utilizar
como plano constructivo porque no contiene dimensiones reales.
17
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
4.1. Smbolos de Instrumentos.
Los diagramas de tuberas e instrumentacin P&ID utilizan: smbolos, letras, lneas especiales y
nmeros de identificacin para representar los instrumentos. La descripcin simblica de los
instrumentos nos debe indica el tipo, localizacin y funcin de cada instrumento. En la siguiente tabla se
muestran algunos de smbolos utilizados y sus respectivos significados:
Tabla 1. Smbolos de Instrumentos en Diagramas P&ID.
CAMPO
TABLERO TABLERO AUXILIAR
(ACCESIBLE ) (DENTRO) (ACCESIBLE)
Instrumento Discreto,
Aislado
Instrumento Compartido.
Sistema de Control
Distribuido.
Computador
Controlador Lgico
Programable (PLC)
4.2. Etiquetas TAGs de Instrumentos.
Cada instrumento puede ser identificado mediante una etiqueta TAG que va dentro del smbolo del
instrumento. Cada TAG est compuesto de dos partes. La primera parte identifica la funcin del
instrumento. Est formada por letras segn la norma ISA (ver tabla de abajo). La segunda parte suele
ser informacin codificada del rea de la planta.
Tabla 2. Letras de Identificacin Funcional de Instrumentos.
Primera Letra Letras Sucesivas
Letra Vari abl e
Lectura o Funcin de Letra de
Funcin Pasiva
Sali da Modificacin
A Anli si s Alarma
B Combustin
C Conductividad, Regulacin (ON-OFF) Control
concentracin
D Densidad, Peso especifico
E Voltaje Sensor
F Fluj o
G Calibre Vidrio
H Manual Alarma de alta
I Corriente Elctrica Indi cacin (i ndi cador)
J Potencia
K Tiempo Estacin de Control
L Nivel Luz Piloto Alarma de baja
M Humedad Medio o intermedio
N Libre a eleccin
O Orificio
P Presin o Vaco Punto de prueba o
conexin
Q Cantidad
R Radiactividad Regi stro
S Velocidad o frecuencia Interruptor
T Temperatura Transmisor
U Multivariable Multifuncin Multifuncin Multifuncin
V Viscosidad Vlvul a
18
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
W Peso o Fuerza Vaina
X Libre a eleccin Libre a eleccin Libre a eleccin Libre a eleccin
Y Evento, Estado, Presencia Rel.
Conversor
Z Posicin Actuador,
Manejador
Ejemplos de etiquetas de instrumentos :
FIC / 101: Controlador e Indicador que pertenece a un lazo de control de Flujo. rea 101.
TR / 201 : Registrador que pertenece a un lazo de control de Temperatura. rea 201. LV /
301 : Vlvula que pertenece a un lazo de control de Nivel. rea 301.
PE / 401 : Sensor que pertenece a un lazo de control de Presin. rea 401.
4.3. Lneas y Seales.
Las lneas indican la forma en que se interconectan los diferentes instrumentos y tuberas dentro de
un lazo de control. Las lneas que representan seales pueden ser de diferentes tipos dependiendo de
la naturaleza de la seal. Ver tabla:
Tabla 3. Tipos de Lneas para Representar Seales
PROCESO, ALIMENTACIN ENLACE MECNICO
SEAL INDEFINIDA ENLACE INFORMTICO
SEAL ELCTRICA (USA) SEAL ELCTRICA DIGITAL (USA)
SEAL ELCTRICA (EU) SEAL ELCTRICA DIGITAL (EU)
SEAL NEUMTICA SEAL NEUMTICA DIGITAL **
SEAL HIDRULICA TUBO CAPILAR
SEAL ELECTROMAGNTICA SEAL ELECTROMAGNTICA
ACSTICA ACSTICA
Se sugieren las siguientes abreviaturas para representar el tipo de alimentacin o purga de los
instrumentos:
AS: Alimentacin de aire.
ES: Alimentacin elctrica.
GS: Alimentacin de gas.
HS: Alimentacin hidrulica.
NS: Alimentacin de nitrgeno.
SS: Alimentacin de vapor. WS:
Alimentacin de agua.
Como se ha podido ver en la tabla anterior, existen varios tipos de seales. Las seales de
transmisin mas utilizadas en la industria son las seales neumticas y elctricas. Las seales
hidrulicas se utilizan cuando se requiere bastante fuerza, y las telemtricas (ondas de radio) cuando se
debe cubrir grandes distancias. Para el caso de las seales elctricas y neumticas se tienen los
siguientes rangos estndar:
Tabla 4. Rangos Estndar para las Seales Elctricas y Neumticas:
SEALES NEUMTICAS 3 15 psi 0.2 1 bar
SEALES ELCTRICAS 4 20 mA 1 5 V
0 20 mA 0 10 V -10 +10 V
4.3.1. Vlvulas de Control.
Las vlvulas son elementos finales de control. Realizan la funcin de variar el flujo del fluido que
pasa por la tubera donde la vlvula est instalada. Las vvulas se comportan como orificios de rea
19
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
variable. Apertura del orificio suele ser regulada de forma manual a travs de accionamiento
neumtico.
La vlvula tiene dos componentes: el actuador y el cuerpo. El actuador convierte la seal de entrada
en un desplazamiento lineal o rotacional, que es trasladado al cuerpo, el cual permite el mayor o menor
paso del flujo de fluido. En caso de no haber seal de accionamiento en la vlvula, esta adopta una
posicin especfica (cerrada o abierta en fallo).
Tabla 5. Smbolos para las Vlvulas de Control
ACTUADOR
ACCIN EN FALLO
CUERPO
MANUAL DE PERILLA MANUAL DE PALANCA SOLENOIDE MOTOR ROTATIVO
A
C
T
U
A
D
O
R
E
S
NEUMTICA CON MUELLE NEUMTICA PROPORCIONAL CILINDRO DE SIMPLE EFECTO CILINDRO DE DOBLE EFECTO
VLVULA EN GENERAL VLVULA DE GLOBO VLVULA DE MARIPOSA VLVULA DE DIAFRAGMA
C
U
E
R
P
O
S
VLVULA DE 3 VAS VLVULA DE 4 VAS
VLVULA ANGULAR OBTURADOR ROTATIVO
VLVULA DE BOLA
ABRE EN FALLO (NO) CIERRA EN FALLO (NC) SE BLOQUEA EN FALLO INDETERMINADA EN FALLO
A
C
C
I
N
4.3.2. Convertidores de Seales.
Realizan el cambio de un tipo de seal a otra. Dicha conversin debe de definirse en la esquina
superior derecha del smbolo teniendo en cuenta las siguientes letras:
I : CORRIENTE
E : VOLTAJ E
P : PRESION NEUMTICA
H : PRESIN HIDRULICA
F : FRECUENCIA
Ejemplo:
Conversor de una seal de corriente a
presin dentro de un lazo de control de
flujo. rea 101.
20
PONTIFICIA UNIVERSIDAD CATLICA DEL PER
SECCIN ELECTRICIDAD Y ELECTRNICA
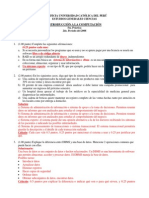
4.3.3. Ejemplo de Lectura de un Diagrama de Instrumentacin (P&ID).
A continuacin se muestra el diagrama P&ID de un intercambiador de calor. En este equipo industrial,
el objetivo es calentar un fluido (que puede ser combustible) hasta una temperatura deseada. El
calentamiento se efecta por transferencia de calor desde un fluido mucho ms caliente comnmente
vapor de agua saturado.
Fig. 2. Ejemplo de un diagrama de tuberas e instrumentacin (P&ID)
El nmero de identificacin del lazo es el 101. Con este nmero y la primera letra identificadora (T) de
temperatura sabemos que el propsito primario de este lazo es el control de temperatura. Los instrumentos
presentes en el lazo son: un sensor de temperatura (TE), un transmisor de temperatura (TT), un
controlador-indicador (TIC) y una vlvula de compuerta de diafragma con muelle (TV). Como elemento
accesorio se tiene un transductor o conversor de corriente a presin (TY-IP). Cada una de estas funciones
es designada por la segunda o tercera letra del cdigo de identificacin.
El sensor, el transmisor y el convertidor estn montados en campo, esto debido a que no hay una lnea
dentro del crculo. La lnea dentro del crculo del controlador indica que este instrumento puede ser
accedido por el operador en la sala de control. Por la simbologa de lneas concluimos que el sensor est
conectado al proceso por medio de un tubo capilar. La lnea punteada indica que la seal del transmisor
hacia el controlador es de tipo elctrica.
La seal que sale del controlador es enviada al conversor I/P que convierte la seal elctrica en una
seal neumtica. Este a su vez manda una seal al elemento final que es una vlvula. Al observar la
direccin de la flecha en el smbolo de la vlvula concluimos que cierra en fallo.
21
También podría gustarte
- Gestion de StocksDocumento22 páginasGestion de StocksAndres Felipe RuizAún no hay calificaciones
- Manuales Electricos CompresoresDocumento247 páginasManuales Electricos Compresoresjacqui258995% (19)
- Balotario Normas de TransitoDocumento29 páginasBalotario Normas de TransitoCesesol Brevetes Peru75% (4)
- Aprenda A Hablar en Público HoyDocumento112 páginasAprenda A Hablar en Público HoyYon T Briceno BuitragoAún no hay calificaciones
- Maqueta ALECOP MT-542 TemperaturaDocumento331 páginasMaqueta ALECOP MT-542 TemperaturaEnergon100% (3)
- Practicas Logix ProDocumento31 páginasPracticas Logix ProIng Alejandro GM100% (1)
- Informe TermocuplaDocumento6 páginasInforme TermocuplaJessica PilatasigAún no hay calificaciones
- 7-La Cocción PDFDocumento111 páginas7-La Cocción PDFVictor Ivan JarroAún no hay calificaciones
- Manual Prácticas Instrumentacion y ControlDocumento62 páginasManual Prácticas Instrumentacion y ControlJosé Manuel Vazquez PulgarAún no hay calificaciones
- Fundamentos Básico de Instrumentación y ControlDocumento137 páginasFundamentos Básico de Instrumentación y ControlVladimir YucraAún no hay calificaciones
- Tesis ItilDocumento91 páginasTesis ItilEnrique Cahuana Ibarra100% (1)
- Evolución de Un Sistema de ManufacturaDocumento13 páginasEvolución de Un Sistema de ManufacturaMariela Rosado TunAún no hay calificaciones
- Dis Tri Buci On Energia Sanju AnDocumento19 páginasDis Tri Buci On Energia Sanju AnCristian Ágreda AlvarezAún no hay calificaciones
- Plan de Gobierno TPP 2016-2021Documento247 páginasPlan de Gobierno TPP 2016-2021MaCley Abundo TrujilloAún no hay calificaciones
- Guia Me1 2014 - 1 FDocumento38 páginasGuia Me1 2014 - 1 FCristian Ágreda AlvarezAún no hay calificaciones
- Ind377 2014 1Documento4 páginasInd377 2014 1Cristian Ágreda AlvarezAún no hay calificaciones
- INFO Gasoducto Sur PeruanoDocumento1 páginaINFO Gasoducto Sur PeruanoBenjamin DavisAún no hay calificaciones
- Dialnet IndicadoresDeGestionEnfocadosAlAhorroEnergeticoPar 4321615Documento6 páginasDialnet IndicadoresDeGestionEnfocadosAlAhorroEnergeticoPar 4321615Ian SamuelsAún no hay calificaciones
- 100761-Es-A DS01 Bu Cim PDFDocumento16 páginas100761-Es-A DS01 Bu Cim PDFCristian Ágreda AlvarezAún no hay calificaciones
- Tratamientode Imágenes DigitalesDocumento8 páginasTratamientode Imágenes DigitalesRoger ZapanaAún no hay calificaciones
- 1cableado PractikasDocumento19 páginas1cableado PractikasMejia ElektromekanakoAún no hay calificaciones
- Exam PucpDocumento5 páginasExam PucpJimmy Joel Quispe BerdejoAún no hay calificaciones
- AgendaMktr 1er Encuentro MecatrónicoDocumento1 páginaAgendaMktr 1er Encuentro MecatrónicoCristian Ágreda AlvarezAún no hay calificaciones
- Normas APA ActualizadasDocumento12 páginasNormas APA ActualizadasJessica MasenAún no hay calificaciones
- Corrientes ParasitasDocumento4 páginasCorrientes ParasitasWallas Waldir Choque FloresAún no hay calificaciones
- Estatuto F1Documento11 páginasEstatuto F1Cristian Ágreda AlvarezAún no hay calificaciones
- Normas Sobre Asuntos Economicos DOC4Documento27 páginasNormas Sobre Asuntos Economicos DOC4Cristian Ágreda AlvarezAún no hay calificaciones
- Ing212 2014 1Documento4 páginasIng212 2014 1José Alcantara RiveraAún no hay calificaciones
- Iee256 2014 1Documento8 páginasIee256 2014 1Cristian Ágreda AlvarezAún no hay calificaciones
- Iee351 2014 1Documento3 páginasIee351 2014 1Cristian Ágreda AlvarezAún no hay calificaciones
- 04 El Arte de Hablar, Oratoria Eficaz. El Mensaje, Lenguaje y Dinamica de La ComunicacionDocumento88 páginas04 El Arte de Hablar, Oratoria Eficaz. El Mensaje, Lenguaje y Dinamica de La ComunicacioncmslanAún no hay calificaciones
- Gestion de Activos para El MantenimientoDocumento7 páginasGestion de Activos para El MantenimientoJQ K'ñiAún no hay calificaciones
- The Woodhouse (Teoria RCM)Documento13 páginasThe Woodhouse (Teoria RCM)lisita23_182Aún no hay calificaciones
- INF117 Practica5 20082-SolucionarioDocumento8 páginasINF117 Practica5 20082-SolucionarioCristian Ágreda AlvarezAún no hay calificaciones
- 2 Ingenieria MantenimientoDocumento17 páginas2 Ingenieria MantenimientoCristian Ágreda AlvarezAún no hay calificaciones
- Manual Extech 830Documento12 páginasManual Extech 830ingridnaAún no hay calificaciones
- Reporte de Caracterizacion TermoparDocumento6 páginasReporte de Caracterizacion TermoparAlejandro FlorencioAún no hay calificaciones
- Catalogo EndressDocumento28 páginasCatalogo EndressSseiifh SseiifhAún no hay calificaciones
- RTDDocumento5 páginasRTDJosé Alfredo MartínezAún no hay calificaciones
- Practica N°2 Sensores Industriales de Temperatura Presion - FormatoDocumento4 páginasPractica N°2 Sensores Industriales de Temperatura Presion - FormatodanteAún no hay calificaciones
- Conceptos TermoparesDocumento9 páginasConceptos TermoparessolcarwxAún no hay calificaciones
- AA - TM5 - Precios de Equipos .Documento10 páginasAA - TM5 - Precios de Equipos .FerdinandjaAún no hay calificaciones
- Motores de combustión interna adaptados a hidrógeno: Análisis y resultados de un motor Briggs & StrattonDocumento47 páginasMotores de combustión interna adaptados a hidrógeno: Análisis y resultados de un motor Briggs & StrattonGary galarzaAún no hay calificaciones
- Guía Pre Reportes Iq-0331 PDFDocumento7 páginasGuía Pre Reportes Iq-0331 PDFmarisanAún no hay calificaciones
- Inv. No. 8 - Tipos de TermómetrosDocumento3 páginasInv. No. 8 - Tipos de TermómetrosYerko VillcaAún no hay calificaciones
- 7501 18936 EsDocumento2 páginas7501 18936 EsPaul Ramos CarcaustoAún no hay calificaciones
- Guias de Practicas Decem 2012 Transferencia de CalorDocumento35 páginasGuias de Practicas Decem 2012 Transferencia de CalorNicole Orellana PintoAún no hay calificaciones
- FabianDocumento32 páginasFabianfsala1120Aún no hay calificaciones
- Toma de Lecturas y Manejo de MultímetroDocumento4 páginasToma de Lecturas y Manejo de MultímetroBayronAún no hay calificaciones
- VC M Manual (Esp)Documento22 páginasVC M Manual (Esp)Ixbalamhu CastellanosAún no hay calificaciones
- Multimetro U1252bDocumento195 páginasMultimetro U1252bLin SvAún no hay calificaciones
- GUID - 1 es-ESDocumento1 páginaGUID - 1 es-ESyndiranett hmAún no hay calificaciones
- Alcance E-158Documento4 páginasAlcance E-158Ramiro OrtegaAún no hay calificaciones
- COMTEC Manual EspañolDocumento64 páginasCOMTEC Manual EspañolCindy HenaoAún no hay calificaciones
- TRABAJO DE INVESTIGACION (Temperatura y Presion)Documento18 páginasTRABAJO DE INVESTIGACION (Temperatura y Presion)Andrelys Teresa M LAún no hay calificaciones
- Sensor de TemperaturaDocumento2 páginasSensor de TemperaturaElena LostaunauAún no hay calificaciones
- Folleto Calibraciones PDFDocumento5 páginasFolleto Calibraciones PDFXiomara MoralesAún no hay calificaciones
- Máquina incubadora huevos gallinaDocumento20 páginasMáquina incubadora huevos gallinaKaterin ContrerasAún no hay calificaciones
- Beamex MC6 Ex Brochure ESPDocumento16 páginasBeamex MC6 Ex Brochure ESPjuan henaoAún no hay calificaciones