También podría gustarte
- Ai Lecture NotesDocumento124 páginasAi Lecture NotesMahesh BabuAún no hay calificaciones
- Care For The Family CaregiverDocumento46 páginasCare For The Family CaregiverAmy AdamsAún no hay calificaciones
- New Headway Advanced. Teacher's Book PDFDocumento168 páginasNew Headway Advanced. Teacher's Book PDFArdita Emini88% (33)
- B. F. Skinner. Cumulative Record (1999)Documento734 páginasB. F. Skinner. Cumulative Record (1999)Lucas Vaz LuizAún no hay calificaciones
- A Glossary of Indian Figures of Speech, E. Gerow 1971 PDFDocumento351 páginasA Glossary of Indian Figures of Speech, E. Gerow 1971 PDFdronregmi100% (1)
- Health NavigatorDocumento12 páginasHealth NavigatorAmy AdamsAún no hay calificaciones
- On Visual Design Thinking The Vis Kids of ArchitectureDocumento18 páginasOn Visual Design Thinking The Vis Kids of Architecturerpm_8204Aún no hay calificaciones
- Lev Manovich The Engeneering of VisionDocumento211 páginasLev Manovich The Engeneering of Visionjulianalugao100% (1)
- Teaching Literacy in The Elementary Grades Through LiteratureDocumento14 páginasTeaching Literacy in The Elementary Grades Through Literaturehazel23Aún no hay calificaciones
- Thinking in Parametric PhenomenologyDocumento10 páginasThinking in Parametric PhenomenologyAlexandre ChienAún no hay calificaciones
- DiscussDocumento2 páginasDiscussruthlessly_inloveAún no hay calificaciones
- Visual CogDocumento14 páginasVisual Cogkanni.40976Aún no hay calificaciones
- Advanced HCI - COM719M1: Introduction - Human Capabilities: Cognition and Perception DR Joan CondellDocumento63 páginasAdvanced HCI - COM719M1: Introduction - Human Capabilities: Cognition and Perception DR Joan Condelltanvir rohanAún no hay calificaciones
- Entropy-Driven Unsupervised Keypoint Representation Learning in VideosDocumento29 páginasEntropy-Driven Unsupervised Keypoint Representation Learning in VideosquinnyijinglinAún no hay calificaciones
- A Review of Artificial IntelligenceDocumento9 páginasA Review of Artificial IntelligenceCleiber NichidaAún no hay calificaciones
- Bruckert Imxw 2023Documento7 páginasBruckert Imxw 2023Tamas LiszkaAún no hay calificaciones
- 21 Sent. WORKSHOP IntroductionDocumento46 páginas21 Sent. WORKSHOP Introductionwarezisgr8Aún no hay calificaciones
- Deep Cognitive Gate: Resembling Human Cognition For Saliency DetectionDocumento18 páginasDeep Cognitive Gate: Resembling Human Cognition For Saliency DetectionAblfazl KianiAún no hay calificaciones
- Brain, Vision and AIDocumento292 páginasBrain, Vision and AIBalasubramanian RavikumarAún no hay calificaciones
- Visual Object-Oriented Programming: WorkshopDocumento3 páginasVisual Object-Oriented Programming: Workshopkimtinh18012005Aún no hay calificaciones
- 2013CHI-Display Workshop EADocumento4 páginas2013CHI-Display Workshop EAeliasAún no hay calificaciones
- Mind Maps Denis ParadeDocumento6 páginasMind Maps Denis Paradekavodao_978213089Aún no hay calificaciones
- Hci Ia-1Documento17 páginasHci Ia-1Shahithya 4077Aún no hay calificaciones
- Web Semantics: Science, Services and Agents On The World Wide WebDocumento5 páginasWeb Semantics: Science, Services and Agents On The World Wide WebKibrom HaftuAún no hay calificaciones
- Consciousness and Computational ModelsDocumento20 páginasConsciousness and Computational ModelsAnimesh SinghAún no hay calificaciones
- Raws W1 W3Documento6 páginasRaws W1 W3Rochelle Ann FernandezAún no hay calificaciones
- Knowledge Representation: Dr. Sumit Srivastava Dept. of CSE, BIT Mesra Ranchi Email:-Sumit@bitmesra - Ac.inDocumento6 páginasKnowledge Representation: Dr. Sumit Srivastava Dept. of CSE, BIT Mesra Ranchi Email:-Sumit@bitmesra - Ac.inspsssagiwalAún no hay calificaciones
- AdvHCI Introd Week1aDocumento66 páginasAdvHCI Introd Week1aVicci MacciAún no hay calificaciones
- Instructional Module and Its Components: Course Human Computer Interaction (HCI) Developer and Their BackgroundDocumento8 páginasInstructional Module and Its Components: Course Human Computer Interaction (HCI) Developer and Their BackgroundRovell AsideraAún no hay calificaciones
- The Conflict of Architectural Intelligence: G: Towards An Integrated Profile of Intelligent Architecture ArchitectureDocumento16 páginasThe Conflict of Architectural Intelligence: G: Towards An Integrated Profile of Intelligent Architecture ArchitectureTHE ARCHAún no hay calificaciones
- The Pyramid of Information - Criticism and OpportunityDocumento10 páginasThe Pyramid of Information - Criticism and OpportunityIJAERS JOURNALAún no hay calificaciones
- Understanding Video Events A Survey of MDocumento64 páginasUnderstanding Video Events A Survey of MXiaochun LuoAún no hay calificaciones
- Knowledge Representation: Concept, Techniques and The Aanalytico-Synthetic ParadigmDocumento12 páginasKnowledge Representation: Concept, Techniques and The Aanalytico-Synthetic Paradigmهيثم محمد عبده قائد المخلافيAún no hay calificaciones
- Clark - Unravelling The Golden BraidDocumento9 páginasClark - Unravelling The Golden BraidDavid_Silverma_8933Aún no hay calificaciones
- Topic: Motion: Information and MediaDocumento9 páginasTopic: Motion: Information and MediaEdsel ReyesAún no hay calificaciones
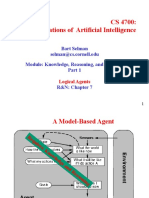
- CS 4700: Foundations of Artificial IntelligenceDocumento91 páginasCS 4700: Foundations of Artificial Intelligenceabdolmojeeb nourAún no hay calificaciones
- Generating Multimodal Output - Conditions, A D V A N T A G e S and ProblemsDocumento5 páginasGenerating Multimodal Output - Conditions, A D V A N T A G e S and ProblemsAfzal ImamAún no hay calificaciones
- Human-Computer Interaction: Topic 2: Humans and Technology: HumansDocumento37 páginasHuman-Computer Interaction: Topic 2: Humans and Technology: HumansHIRSIOAún no hay calificaciones
- G11 T2 Phy PA-finalDocumento11 páginasG11 T2 Phy PA-finalChoco BunAún no hay calificaciones
- Neuro Symbloic 3Documento19 páginasNeuro Symbloic 3raky25Aún no hay calificaciones
- Leveraging Recent Advances in Deep Learning For Audio-Visual Emotion RecognitionDocumento8 páginasLeveraging Recent Advances in Deep Learning For Audio-Visual Emotion RecognitionLiam SchoneveldAún no hay calificaciones
- CS8079 2marksDocumento40 páginasCS8079 2marksmenakadevieceAún no hay calificaciones
- Writer and Story Writing InvolvesDocumento9 páginasWriter and Story Writing InvolvesbalayogivAún no hay calificaciones
- Tahani 1990Documento9 páginasTahani 1990zouari mariamAún no hay calificaciones
- L02 - Knowledge-Rep - Part 1Documento47 páginasL02 - Knowledge-Rep - Part 1jl289173Aún no hay calificaciones
- All Chapters (Compatibility Mode)Documento27 páginasAll Chapters (Compatibility Mode)Ahmad ZaimAún no hay calificaciones
- Attention in Natural Language Processing: Andrea Galassi, Marco Lippi, and Paolo TorroniDocumento18 páginasAttention in Natural Language Processing: Andrea Galassi, Marco Lippi, and Paolo TorroniTruong GiangAún no hay calificaciones
- Expert Systems With Applications: Huifeng Tang, Songbo Tan, Xueqi ChengDocumento14 páginasExpert Systems With Applications: Huifeng Tang, Songbo Tan, Xueqi ChengroopachandrikaAún no hay calificaciones
- Wilkens Et Al-2003-Proceedings of The American Society For Information Science and TechnologyDocumento7 páginasWilkens Et Al-2003-Proceedings of The American Society For Information Science and TechnologyandredesousaAún no hay calificaciones
- Deep-Emotion: Facial Expression Recognition Using Attentional Convolutional NetworkDocumento8 páginasDeep-Emotion: Facial Expression Recognition Using Attentional Convolutional NetworkGyi GyiAún no hay calificaciones
- Visual Queries: The Foundation of Visual Thinking: Lecture Notes in Computer Science January 2005Documento10 páginasVisual Queries: The Foundation of Visual Thinking: Lecture Notes in Computer Science January 2005Kumud BaliyanAún no hay calificaciones
- Mathematics Subject Group Overview 2015-16 2Documento18 páginasMathematics Subject Group Overview 2015-16 2fjediAún no hay calificaciones
- Giorgio Roffo: Curriculum VitæDocumento10 páginasGiorgio Roffo: Curriculum Vitæapi-250451564Aún no hay calificaciones
- NLP and Knowledge Engineering To Extract Models From TextDocumento17 páginasNLP and Knowledge Engineering To Extract Models From Textmahdi.fa97Aún no hay calificaciones
- Visual Attention While DrivingDocumento12 páginasVisual Attention While DrivingTaisir AlhiloAún no hay calificaciones
- On Single Point Forecasts For Fat-Tailed VariablesDocumento10 páginasOn Single Point Forecasts For Fat-Tailed VariableslerhlerhAún no hay calificaciones
- Object Detection With Deep Learning: A ReviewDocumento21 páginasObject Detection With Deep Learning: A Reviewvikky shrmaAún no hay calificaciones
- 1-AI Definition - Evolution - Sub Fields-04!01!2024Documento17 páginas1-AI Definition - Evolution - Sub Fields-04!01!2024shreyansh.saurav21Aún no hay calificaciones
- Session: Deep Learning: Module: Digital Image Processing Module Code: IMP302Documento34 páginasSession: Deep Learning: Module: Digital Image Processing Module Code: IMP302mohammedAún no hay calificaciones
- GR7. Gasparski. 1994Documento11 páginasGR7. Gasparski. 1994David Hernandez AusiqueAún no hay calificaciones
- SOU Conference PolymathyDocumento49 páginasSOU Conference PolymathyGermano MatiasAún no hay calificaciones
- Aj13 The-Social-Nature-Of-Representational-Engineering-Knowledge PDFDocumento16 páginasAj13 The-Social-Nature-Of-Representational-Engineering-Knowledge PDFyeneAún no hay calificaciones
- Multimodal Deep LearningDocumento21 páginasMultimodal Deep Learningsagnik ghosalAún no hay calificaciones
- GE 4 Unit II Lesson 10Documento39 páginasGE 4 Unit II Lesson 10Walwal WalwalAún no hay calificaciones
- KE QB Questions OnlyDocumento7 páginasKE QB Questions OnlyJohnyAún no hay calificaciones
- Pattern Recognition by Humans and Machines: Visual PerceptionDe EverandPattern Recognition by Humans and Machines: Visual PerceptionAún no hay calificaciones
- Computational Intelligence, IIIDe EverandComputational Intelligence, IIIG. ValleAún no hay calificaciones
- Traveling BrochureDocumento2 páginasTraveling BrochureAmy AdamsAún no hay calificaciones
- Tip 37 BrochureDocumento4 páginasTip 37 BrochureAmy AdamsAún no hay calificaciones
- What Is MCVNN?Documento2 páginasWhat Is MCVNN?Amy AdamsAún no hay calificaciones
- Rock-Solid Stability and Rigidity and Superior Fluorescence TechnologyDocumento4 páginasRock-Solid Stability and Rigidity and Superior Fluorescence TechnologyAmy AdamsAún no hay calificaciones
- Bergstrom and Bergstrom 06Documento8 páginasBergstrom and Bergstrom 06Robert FetchAún no hay calificaciones
- Naval Postgraduate School Monterey California 93943 5138 NPS 09-05-002Documento129 páginasNaval Postgraduate School Monterey California 93943 5138 NPS 09-05-002sambala4444Aún no hay calificaciones
- Thesis LogDocumento31 páginasThesis LogAmy Adams0% (1)
- Diss These SDocumento3 páginasDiss These SAmy AdamsAún no hay calificaciones
- Fucidin (R) OintmentDocumento4 páginasFucidin (R) OintmentAmy AdamsAún no hay calificaciones
- Code Manual: The Seer ProgramDocumento180 páginasCode Manual: The Seer ProgramAmy AdamsAún no hay calificaciones
- U.S. Department of Justice Federal Bureau of Investigation Criminal JusticeDocumento142 páginasU.S. Department of Justice Federal Bureau of Investigation Criminal JusticeAmy AdamsAún no hay calificaciones
- AndroMen Forte 5 CMIDocumento2 páginasAndroMen Forte 5 CMIAmy AdamsAún no hay calificaciones
- ETX 60 70AT ManualDocumento40 páginasETX 60 70AT Manualavijeet2828Aún no hay calificaciones
- 8602 2nd AssignmentDocumento48 páginas8602 2nd AssignmentWaqas AhmadAún no hay calificaciones
- MBA NMIMS - 20 - DecDocumento11 páginasMBA NMIMS - 20 - DecshailendraAún no hay calificaciones
- Implementing HRD ProgramsDocumento36 páginasImplementing HRD Programssuganyababumba100% (1)
- Performance TaskDocumento2 páginasPerformance TaskAzer MendozaAún no hay calificaciones
- Axum Polytechnic CollegeDocumento16 páginasAxum Polytechnic CollegeTeslim OumerAún no hay calificaciones
- English I Lesson Plan - DetailedDocumento10 páginasEnglish I Lesson Plan - DetailedAdriyel Mislang SantiagoAún no hay calificaciones
- Brief Lesson Plan in Science IIIDocumento29 páginasBrief Lesson Plan in Science IIINeil DeclaroAún no hay calificaciones
- Acdemic ReadingDocumento112 páginasAcdemic ReadingChristopher LottAún no hay calificaciones
- Analize The AudiounsDocumento3 páginasAnalize The AudiounsAbdul AzizAún no hay calificaciones
- Klebar Lesson Plan 4-25-4-29-2022Documento4 páginasKlebar Lesson Plan 4-25-4-29-2022api-596111116Aún no hay calificaciones
- MAPEHDocumento6 páginasMAPEHHeather Angel LimAún no hay calificaciones
- MODULE 1 LES 2aDocumento35 páginasMODULE 1 LES 2aShania LeysonAún no hay calificaciones
- Action Plan For KinderDocumento2 páginasAction Plan For KinderTeacher Aleana Camat100% (1)
- Delhi Public School Society: Application FormDocumento8 páginasDelhi Public School Society: Application FormSoneeyaa SharmaAún no hay calificaciones
- English: Learning ModuleDocumento12 páginasEnglish: Learning Modulecoosa liquorsAún no hay calificaciones
- Slides-4 Optimization Extra Gradient DescentDocumento67 páginasSlides-4 Optimization Extra Gradient DescentBhavana AkkirajuAún no hay calificaciones
- Management Science Group IDocumento9 páginasManagement Science Group Illaneraerika14Aún no hay calificaciones
- (AC-S07) Week 7 - Task: Assignment - Where Is The Hospital?: Due May 9 by 11:59pmDocumento4 páginas(AC-S07) Week 7 - Task: Assignment - Where Is The Hospital?: Due May 9 by 11:59pmVENTAS CATABIAún no hay calificaciones
- Pushers SyndromeDocumento2 páginasPushers SyndromeFlaviaAún no hay calificaciones
- BP B1 Tests Unit1Documento6 páginasBP B1 Tests Unit1JovanaAún no hay calificaciones
- ChatGPT Made Me Question What It Means To Be A Creative HumanDocumento4 páginasChatGPT Made Me Question What It Means To Be A Creative HumanJair KitnerAún no hay calificaciones
- ChscounselingbrochureDocumento2 páginasChscounselingbrochureapi-241451596Aún no hay calificaciones
- Weebly Homework Article Review Standard 2Documento11 páginasWeebly Homework Article Review Standard 2api-289106854Aún no hay calificaciones
- Does Luck Play Important Role in SuccessDocumento2 páginasDoes Luck Play Important Role in Successshivam singhAún no hay calificaciones
- OF BEE TO TO OFA: The Properties of Language I. Communicative vs. Informative SignalsDocumento5 páginasOF BEE TO TO OFA: The Properties of Language I. Communicative vs. Informative SignalsAnia KAún no hay calificaciones