También podría gustarte
- COMP 4421 - Image ProcessingDocumento56 páginasCOMP 4421 - Image ProcessingLinh TaAún no hay calificaciones
- Chapter 5 Image Restoration - 01Documento37 páginasChapter 5 Image Restoration - 01Aman Ahmad SiddiqueeAún no hay calificaciones
- Image Processing: Gaurav GuptaDocumento38 páginasImage Processing: Gaurav GuptaanithaAún no hay calificaciones
- Lecture#27Documento51 páginasLecture#27Afsheen ZaibAún no hay calificaciones
- 1.1 OverviewDocumento51 páginas1.1 Overviewjenish devAún no hay calificaciones
- Unit 3Documento49 páginasUnit 3Mayank RohillaAún no hay calificaciones
- Image Restoration TechniquesDocumento79 páginasImage Restoration TechniquesSanthosh PaAún no hay calificaciones
- Image Processing: Gaurav GuptaDocumento38 páginasImage Processing: Gaurav GuptaSnehal ChotheAún no hay calificaciones
- Dip S8ece Module4Documento145 páginasDip S8ece Module4Neeraja JohnAún no hay calificaciones
- Ip Unit-3Documento12 páginasIp Unit-3Arjun singhAún no hay calificaciones
- CEN 545 Lecture Notes 1 and 2Documento10 páginasCEN 545 Lecture Notes 1 and 2Shafayet UddinAún no hay calificaciones
- Digital Video: Progressive Scanning: One Full Frame Every 1/30th of A SecondDocumento12 páginasDigital Video: Progressive Scanning: One Full Frame Every 1/30th of A Secondsandipprmar007Aún no hay calificaciones
- Chap. 3: Image Enhancement in The Spatial Domain: Spring 2006, Jen-Chang Liu Csie, NcnuDocumento34 páginasChap. 3: Image Enhancement in The Spatial Domain: Spring 2006, Jen-Chang Liu Csie, NcnuSelect dsouzaAún no hay calificaciones
- Image Restoration TechniquesDocumento30 páginasImage Restoration TechniquesVaib AgraAún no hay calificaciones
- Lecture 4: Non-Linear Filters & Image Compression: B14 Image Analysis Michaelmas 2014 A. ZissermanDocumento54 páginasLecture 4: Non-Linear Filters & Image Compression: B14 Image Analysis Michaelmas 2014 A. ZissermanybAún no hay calificaciones
- Digital Image ProcessingDocumento62 páginasDigital Image ProcessingDeepa RameshAún no hay calificaciones
- EE-583 Image Restoration TechniquesDocumento34 páginasEE-583 Image Restoration TechniquesYazanAlomariAún no hay calificaciones
- Image Restoration 影像復 原: Spring 2005, Jen-Chang LiuDocumento58 páginasImage Restoration 影像復 原: Spring 2005, Jen-Chang Liupatelvaidehi07Aún no hay calificaciones
- Image Restoration and Segmentation Image Restoration and SegmentationDocumento79 páginasImage Restoration and Segmentation Image Restoration and SegmentationMaheswaran UmaiyorupaganAún no hay calificaciones
- Image Restoration: Yinghua He School of Computer Science and Technology Tianjin UniversityDocumento116 páginasImage Restoration: Yinghua He School of Computer Science and Technology Tianjin UniversityARUNA TNAún no hay calificaciones
- Chapter 5Documento26 páginasChapter 5k5252552Aún no hay calificaciones
- CHAPTER-6 CLASS-6 Spatial FilteringDocumento144 páginasCHAPTER-6 CLASS-6 Spatial FilteringAlemseged MengistuAún no hay calificaciones
- Dip Unit2Documento172 páginasDip Unit2Vaishnavi BavalekarAún no hay calificaciones
- Image Processing: Gaurav GuptaDocumento38 páginasImage Processing: Gaurav GuptaKoteswara Rao LAún no hay calificaciones
- DSP in Image ProcessingDocumento10 páginasDSP in Image ProcessingFaraz ImranAún no hay calificaciones
- Ravi Im RestDocumento62 páginasRavi Im RestravibabukancharlaAún no hay calificaciones
- TDI2131 Digital Image Enhancement TechniquesDocumento57 páginasTDI2131 Digital Image Enhancement TechniquessuzukigirlAún no hay calificaciones
- Spatial FilteringDocumento50 páginasSpatial FilteringeduhelloAún no hay calificaciones
- Chapter05Documento62 páginasChapter05shvdoAún no hay calificaciones
- Spatial Filtering ppt1Documento66 páginasSpatial Filtering ppt1musicstand29Aún no hay calificaciones
- DIP7Documento159 páginasDIP7Aravinth CpAún no hay calificaciones
- 5-SpatialFiltering 2Documento74 páginas5-SpatialFiltering 2pham tamAún no hay calificaciones
- Lec 16 Image MaskingDocumento35 páginasLec 16 Image MaskingIqrakhanAún no hay calificaciones
- Image Processing: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005Documento18 páginasImage Processing: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005supriya9900Aún no hay calificaciones
- Image Processing: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005Documento18 páginasImage Processing: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005supriya9900Aún no hay calificaciones
- Variational Techniques For Image Denoising: A ReviewDocumento5 páginasVariational Techniques For Image Denoising: A Reviewgoel61411Aún no hay calificaciones
- Lecture 4. Image RestorationDocumento39 páginasLecture 4. Image Restorationenkhtsetseg enkhbatAún no hay calificaciones
- Image RestorationDocumento41 páginasImage Restorationcsbits0% (1)
- Digital Image Processing: Image Enhancement in Spatial DomainDocumento26 páginasDigital Image Processing: Image Enhancement in Spatial DomainAyesha SiddiqaAún no hay calificaciones
- Image Operations IDocumento41 páginasImage Operations IMuhammad Zaka Ud DinAún no hay calificaciones
- F IitersDocumento76 páginasF IitersRajalakshmi MohandhossAún no hay calificaciones
- Principal of Image Processing - Image Enhancement EbookDocumento26 páginasPrincipal of Image Processing - Image Enhancement EbookHimanshu BhardwajAún no hay calificaciones
- ImageBasic - 0.1haDocumento92 páginasImageBasic - 0.1haDương Lê HồngAún no hay calificaciones
- Edge DetectionDocumento29 páginasEdge DetectionAri SutartoAún no hay calificaciones
- Spatial Filtering MethodsDocumento55 páginasSpatial Filtering MethodsNitheeshAún no hay calificaciones
- ECES 682 Digital Image Processing: Oleh Tretiak ECE Department Drexel UniversityDocumento23 páginasECES 682 Digital Image Processing: Oleh Tretiak ECE Department Drexel UniversityRashi AgarwalAún no hay calificaciones
- DIGITIZATION OF SPATIAL COORDINATESDocumento2 páginasDIGITIZATION OF SPATIAL COORDINATESsuneel laxmipuramAún no hay calificaciones
- Lecture02 Image ProcessingDocumento39 páginasLecture02 Image ProcessingHatem DheerAún no hay calificaciones
- Ch05-Image RestorationDocumento49 páginasCh05-Image Restorationbaigsalman251Aún no hay calificaciones
- Unit3 Image ProcessingDocumento12 páginasUnit3 Image ProcessingManjeet MrinalAún no hay calificaciones
- Image Processing SeminarDocumento48 páginasImage Processing SeminarAnkur SinghAún no hay calificaciones
- Dip Notes@Azdocuments - inDocumento181 páginasDip Notes@Azdocuments - inJakajaAún no hay calificaciones
- Lezione InterpolazioneDocumento58 páginasLezione Interpolazionevis_geniusAún no hay calificaciones
- Image Enhancement: Images Courtesy: Digital Image Processing FOURTH EDITION, Rafael C. Gonzalez - Richard E. WoodsDocumento130 páginasImage Enhancement: Images Courtesy: Digital Image Processing FOURTH EDITION, Rafael C. Gonzalez - Richard E. Woodskparisa05Aún no hay calificaciones
- CS 401 Digital Image Processing - Week 11: Spatial FilteringDocumento34 páginasCS 401 Digital Image Processing - Week 11: Spatial FilteringRubinaAún no hay calificaciones
- Basics of Radiography Testing and Image ProcessingDocumento30 páginasBasics of Radiography Testing and Image ProcessingbmrasheedAún no hay calificaciones
- AN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESDe EverandAN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESAún no hay calificaciones
- Digital Image Processing: Fundamentals and ApplicationsDe EverandDigital Image Processing: Fundamentals and ApplicationsAún no hay calificaciones
- Past Paper Booklet - QPDocumento506 páginasPast Paper Booklet - QPMukeshAún no hay calificaciones
- Introduction To Global Positioning System: Anil Rai I.A.S.R.I., New Delhi - 110012Documento19 páginasIntroduction To Global Positioning System: Anil Rai I.A.S.R.I., New Delhi - 110012vinothrathinamAún no hay calificaciones
- Value Chain AnalysisDocumento4 páginasValue Chain AnalysisnidamahAún no hay calificaciones
- WCM - March 2017-Final Version PDF - 4731677 - 01Documento211 páginasWCM - March 2017-Final Version PDF - 4731677 - 01Antonio VargasAún no hay calificaciones
- A. What Is Balanced/objective Review or Criticism?Documento11 páginasA. What Is Balanced/objective Review or Criticism?Risha Ann CortesAún no hay calificaciones
- Illegal FishingDocumento1 páginaIllegal FishingDita DwynAún no hay calificaciones
- Maturity Mode Agile BookDocumento110 páginasMaturity Mode Agile BookSai VenkatAún no hay calificaciones
- Plants Life Cycles and PartsDocumento5 páginasPlants Life Cycles and PartsseemaAún no hay calificaciones
- ABRAMS M H The Fourth Dimension of A PoemDocumento17 páginasABRAMS M H The Fourth Dimension of A PoemFrancyne FrançaAún no hay calificaciones
- Module 5 Communication & Change MGT - HS Planning & Policy Making ToolkitDocumento62 páginasModule 5 Communication & Change MGT - HS Planning & Policy Making ToolkitKristine De Luna TomananAún no hay calificaciones
- Afrah Summer ProjectDocumento11 páginasAfrah Summer Projectاشفاق احمدAún no hay calificaciones
- Trabajo de Investigación FormativaDocumento75 páginasTrabajo de Investigación Formativalucio RAún no hay calificaciones
- Earth and Beyond PDFDocumento5 páginasEarth and Beyond PDFNithyananda Prabhu100% (1)
- Pic Attack1Documento13 páginasPic Attack1celiaescaAún no hay calificaciones
- Cats - CopioniDocumento64 páginasCats - CopioniINES ALIPRANDIAún no hay calificaciones
- Experimental Investigation On The Properties of Compressed Earth Blocks Stabilised With A Liquid ChemicalDocumento7 páginasExperimental Investigation On The Properties of Compressed Earth Blocks Stabilised With A Liquid ChemicalDeb Dulal TripuraAún no hay calificaciones
- Yardi Commercial SuiteDocumento52 páginasYardi Commercial SuiteSpicyAún no hay calificaciones
- Funny Physics QuestionsDocumento3 páginasFunny Physics Questionsnek tsilAún no hay calificaciones
- Microwave: Microwaves Are A Form ofDocumento9 páginasMicrowave: Microwaves Are A Form ofDhanmeet KaurAún no hay calificaciones
- Textile Finishing Different Types of Mechanical Finishes For TextilesDocumento3 páginasTextile Finishing Different Types of Mechanical Finishes For TextilesMohammed Atiqul Hoque ChowdhuryAún no hay calificaciones
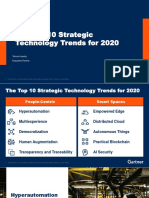
- The Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerDocumento31 páginasThe Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerCarlos Stuars Echeandia CastilloAún no hay calificaciones
- 2019 ASME Section V ChangesDocumento61 páginas2019 ASME Section V Changesmanisami7036100% (4)
- BILL of Entry (O&A) PDFDocumento3 páginasBILL of Entry (O&A) PDFHiJackAún no hay calificaciones
- KG ResearchDocumento257 páginasKG ResearchMuhammad HusseinAún no hay calificaciones
- (V) 2020-Using Extensive Reading in Improving Reading Speed and Level of Reading Comprehension of StudentsDocumento7 páginas(V) 2020-Using Extensive Reading in Improving Reading Speed and Level of Reading Comprehension of StudentsMEYTA RAHMATUL AZKIYAAún no hay calificaciones
- O - 6 Series Mill Operation Manual-ENDocumento119 páginasO - 6 Series Mill Operation Manual-ENLeonardo OlivaresAún no hay calificaciones
- © 2020 Lippincott Advisor Nursing Care Plans For Medical Diagnoses - Coronavirus Disease 2019 (COVID 19) PDFDocumento7 páginas© 2020 Lippincott Advisor Nursing Care Plans For Medical Diagnoses - Coronavirus Disease 2019 (COVID 19) PDFVette Angelikka Dela CruzAún no hay calificaciones
- Talon Star Trek Mod v0.2Documento4 páginasTalon Star Trek Mod v0.2EdmundBlackadderIVAún no hay calificaciones
- Windows Keyboard Shortcuts OverviewDocumento3 páginasWindows Keyboard Shortcuts OverviewShaik Arif100% (1)
- MP & MC Module-4Documento72 páginasMP & MC Module-4jeezAún no hay calificaciones