También podría gustarte
- Electrical Invoice Template from SwapnasiddhiDocumento2 páginasElectrical Invoice Template from SwapnasiddhiAshish DeotaleAún no hay calificaciones
- Trusses 1Documento3 páginasTrusses 1Esmaeil Na0% (1)
- NKVSDocumento1 páginaNKVSAshish DeotaleAún no hay calificaciones
- S.No State City JEE (Offline) 2018 JEE (Online) 2018Documento6 páginasS.No State City JEE (Offline) 2018 JEE (Online) 2018Ashish DeotaleAún no hay calificaciones
- IIT Bombay UCEED 2019 important dates registration exam centersDocumento1 páginaIIT Bombay UCEED 2019 important dates registration exam centersAshish DeotaleAún no hay calificaciones
- Electrical Invoice Template from SwapnasiddhiDocumento2 páginasElectrical Invoice Template from SwapnasiddhiAshish DeotaleAún no hay calificaciones
- Young Indian ScientistDocumento18 páginasYoung Indian ScientistAshish DeotaleAún no hay calificaciones
- Importance of family values and relationships discussedDocumento8 páginasImportance of family values and relationships discussedAshish DeotaleAún no hay calificaciones
- Fav ShayriDocumento3 páginasFav ShayriAshish DeotaleAún no hay calificaciones
- Noise Pollution ObjectivesDocumento1 páginaNoise Pollution ObjectivesAshish Deotale67% (6)
- Biodiversity SangliDocumento7 páginasBiodiversity SangliAshish DeotaleAún no hay calificaciones
- Acid RainDocumento35 páginasAcid RainAshish Deotale100% (4)
- Birds LifeDocumento6 páginasBirds LifeAshish DeotaleAún no hay calificaciones
- Kundali SthansDocumento1 páginaKundali SthansAshish DeotaleAún no hay calificaciones
- Acid RainDocumento35 páginasAcid RainAshish DeotaleAún no hay calificaciones
- Extinct BirdsDocumento3 páginasExtinct BirdsAshish DeotaleAún no hay calificaciones
- Shivaji University Engg FeDocumento9 páginasShivaji University Engg FeAshish DeotaleAún no hay calificaciones
- List of Diploma Institutes in Pune RegionDocumento28 páginasList of Diploma Institutes in Pune RegionAshish DeotaleAún no hay calificaciones
- Extinct BirdsDocumento3 páginasExtinct BirdsAshish DeotaleAún no hay calificaciones
- Air Compressor SeminarDocumento15 páginasAir Compressor SeminarAshish Deotale75% (4)
- Water PollutionDocumento4 páginasWater PollutionAshish DeotaleAún no hay calificaciones
- Sandpani Sheti MarathiDocumento6 páginasSandpani Sheti MarathiAshish DeotaleAún no hay calificaciones
- Sainya Padak MarathiDocumento1 páginaSainya Padak MarathiAshish DeotaleAún no hay calificaciones
- Electronic PartsDocumento23 páginasElectronic PartsAshish DeotaleAún no hay calificaciones
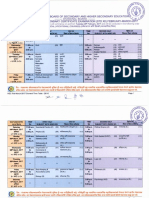
- HSC Mar 17 General PDFDocumento8 páginasHSC Mar 17 General PDFAshish DeotaleAún no hay calificaciones
- Sports Person EnglishDocumento4 páginasSports Person EnglishAshish DeotaleAún no hay calificaciones
- Indian Singers and MusiciansDocumento6 páginasIndian Singers and MusiciansAshish DeotaleAún no hay calificaciones
- Water ProjectDocumento8 páginasWater ProjectAshish DeotaleAún no hay calificaciones
- PLC & SCADA Automation CourseDocumento2 páginasPLC & SCADA Automation CourseAshish DeotaleAún no hay calificaciones
- List of Diploma Institutes in Pune RegionDocumento28 páginasList of Diploma Institutes in Pune RegionAshish DeotaleAún no hay calificaciones
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Briar B. Crain: EducationDocumento2 páginasBriar B. Crain: Educationapi-541610137Aún no hay calificaciones
- The Structure and Function of Large Biological Molecules: BiologyDocumento32 páginasThe Structure and Function of Large Biological Molecules: BiologyUyyykllAún no hay calificaciones
- Raa' - Tafkheem & Tarqeeq - Tajweed MeDocumento11 páginasRaa' - Tafkheem & Tarqeeq - Tajweed MeClass DocumentAún no hay calificaciones
- Vida 7Documento32 páginasVida 7Silvia Rodriguez100% (1)
- Prambanan Temple LegendDocumento1 páginaPrambanan Temple LegendClara NadaAún no hay calificaciones
- DR Raudhah Ahmadi KNS1633 Engineering Mechanics Civil Engineering, UNIMASDocumento32 páginasDR Raudhah Ahmadi KNS1633 Engineering Mechanics Civil Engineering, UNIMASAriff JasniAún no hay calificaciones
- Template For Group AssignmentDocumento5 páginasTemplate For Group AssignmentIntan QamariaAún no hay calificaciones
- Syllabus Mac1105 M 530 - 8 PM 203080Documento6 páginasSyllabus Mac1105 M 530 - 8 PM 203080api-261843361Aún no hay calificaciones
- Research Paper - Interest of Science SubjectDocumento5 páginasResearch Paper - Interest of Science SubjectcyrilAún no hay calificaciones
- Pro ManualDocumento67 páginasPro ManualAlan De La FuenteAún no hay calificaciones
- Syllabus of BS English (Language & Literature) Implemented From 1 Semester Fall 2021Documento95 páginasSyllabus of BS English (Language & Literature) Implemented From 1 Semester Fall 2021Lahore PunjabAún no hay calificaciones
- Figures of Speech AND 21 Literary GenresDocumento33 páginasFigures of Speech AND 21 Literary GenresMike AsuncionAún no hay calificaciones
- Ning™: The Six Cs of Effective MessagesDocumento40 páginasNing™: The Six Cs of Effective MessagestbnjhjlkkkkkkAún no hay calificaciones
- 7 Ways To Shortlist The Right StocksDocumento10 páginas7 Ways To Shortlist The Right Stockskrana26Aún no hay calificaciones
- An Exploratory Study of Personal Calendar UseDocumento23 páginasAn Exploratory Study of Personal Calendar UseManas Tungare100% (1)
- Soal EnglishDocumento7 páginasSoal EnglishRieZky RamadhaniAún no hay calificaciones
- Thematic Language-Stimulation TherapyDocumento19 páginasThematic Language-Stimulation TherapyPipa Yau100% (1)
- New Edition ThesisDocumento100 páginasNew Edition Thesisniluka welagedaraAún no hay calificaciones
- Code of Ethics in 40 CharactersDocumento8 páginasCode of Ethics in 40 Charactersvasu bansalAún no hay calificaciones
- Understanding The SelfDocumento10 páginasUnderstanding The Selfgame master50% (2)
- Group 2Documento3 páginasGroup 2sharmisthahalder21Aún no hay calificaciones
- Module For Hyperbolic GeometryDocumento41 páginasModule For Hyperbolic GeometryShela RamosAún no hay calificaciones
- Mario, You Might Need ThisDocumento436 páginasMario, You Might Need ThisJk McCreaAún no hay calificaciones
- A Review of The Book That Made Your World. by Vishal MangalwadiDocumento6 páginasA Review of The Book That Made Your World. by Vishal Mangalwadigaylerob100% (1)
- Writing Essays B1Documento6 páginasWriting Essays B1Manuel Jose Arias TabaresAún no hay calificaciones
- 1 Gaona BrianDocumento218 páginas1 Gaona BrianElias Nicol100% (1)
- Genealogy On June 09-2003Documento25 páginasGenealogy On June 09-2003syedyusufsam92100% (3)
- 99 Names of Allah SWT and Mohammed (PBUH)Documento11 páginas99 Names of Allah SWT and Mohammed (PBUH)api-26870382100% (1)
- Akhila-Rasamrta-Murtih Prasrmara-Ruci-Ruddha-Taraka-PalihDocumento44 páginasAkhila-Rasamrta-Murtih Prasrmara-Ruci-Ruddha-Taraka-PalihSauri ChaitanyaAún no hay calificaciones
- The US in WWII 1942 - 1944: The Outcome Is That We Were Able To Gain Sicily. We Got Into Italy Through SicilyDocumento3 páginasThe US in WWII 1942 - 1944: The Outcome Is That We Were Able To Gain Sicily. We Got Into Italy Through SicilyVivian HartmanAún no hay calificaciones