También podría gustarte
- FQC IISC-250kvaDocumento23 páginasFQC IISC-250kvaDeepak GehlotAún no hay calificaciones
- CRW 367-373Documento7 páginasCRW 367-373amrrefkyAún no hay calificaciones
- Functional Model For 18-Pulse Autotransformer Rectifier Unit in More Electrical AircraftDocumento6 páginasFunctional Model For 18-Pulse Autotransformer Rectifier Unit in More Electrical AircraftYang TaoAún no hay calificaciones
- SPWM Strategy For'an Open-End Winding Induction Motor Drive Using - Level Inverters With Separate SuppliesDocumento4 páginasSPWM Strategy For'an Open-End Winding Induction Motor Drive Using - Level Inverters With Separate SuppliesGanesh ChallaAún no hay calificaciones
- Optimum Space Vector PWM Algorithm For Three-Level Inverter: B. Urmila and D. Subba RayuduDocumento13 páginasOptimum Space Vector PWM Algorithm For Three-Level Inverter: B. Urmila and D. Subba RayudusureshonuAún no hay calificaciones
- An SVM Algorithm To Balance The Capacitor Voltages of The Three-Level NPC APFDocumento9 páginasAn SVM Algorithm To Balance The Capacitor Voltages of The Three-Level NPC APFTran Quoc HoanAún no hay calificaciones
- A Novel Three-Phase Three-Port UPS Employing A Single High-Frequency Isolation TransformerDocumento7 páginasA Novel Three-Phase Three-Port UPS Employing A Single High-Frequency Isolation TransformerDaniel Oscar GarridoAún no hay calificaciones
- Three-Phase STATCOM Models For Large-Scale Newton-Raphson Power Flow StudiesDocumento6 páginasThree-Phase STATCOM Models For Large-Scale Newton-Raphson Power Flow StudiesAmit DebnathAún no hay calificaciones
- A Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsDocumento9 páginasA Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsInternational Journal of Engineering Inventions (IJEI)Aún no hay calificaciones
- Ripple Current Analysis of Three-Level Inverter Based On SVPWM and Design of LCL FilterDocumento7 páginasRipple Current Analysis of Three-Level Inverter Based On SVPWM and Design of LCL FilterAnonymous eCmTYonQ84Aún no hay calificaciones
- A New Mathematical Model and Control of A Three-Phase AC-DC Voltage Source ConverterDocumento8 páginasA New Mathematical Model and Control of A Three-Phase AC-DC Voltage Source ConverterVenktesh MishraAún no hay calificaciones
- Cap 6Documento67 páginasCap 6ccprado1100% (1)
- University of Tripoli Faculty of Engineering Electrical and Electronics Engineering DepartmentDocumento8 páginasUniversity of Tripoli Faculty of Engineering Electrical and Electronics Engineering DepartmentShehab RamadanAún no hay calificaciones
- Novel, Switch, Z-Source Three-Phase InverterDocumento6 páginasNovel, Switch, Z-Source Three-Phase InverterJanjanam PraveenAún no hay calificaciones
- Full Report 2007Documento23 páginasFull Report 2007Venkata SubramanianAún no hay calificaciones
- PWM 2 Level and 3 LevelDocumento7 páginasPWM 2 Level and 3 LevelnewrajasinghAún no hay calificaciones
- Evaluation of Current Ripple Amplitude in Three-Phase PWM Voltage Source InvertersDocumento6 páginasEvaluation of Current Ripple Amplitude in Three-Phase PWM Voltage Source InvertersluanleAún no hay calificaciones
- Three-Phase Modular Multilevel Current Source Rectifiers For Electric Vehicle Battery Charging SystemsDocumento7 páginasThree-Phase Modular Multilevel Current Source Rectifiers For Electric Vehicle Battery Charging SystemsKyogbsyAún no hay calificaciones
- A Simplified Forward and Backward Sweep ApproachDocumento5 páginasA Simplified Forward and Backward Sweep ApproachImranAhmadQuadriAún no hay calificaciones
- Three-Phase PWM Rectifier With Constant Switching Frequency: Abstract - in This Paper, A Novel AdaptiveDocumento6 páginasThree-Phase PWM Rectifier With Constant Switching Frequency: Abstract - in This Paper, A Novel AdaptiveKuntal SatpathiAún no hay calificaciones
- 13IPST121Documento7 páginas13IPST121Anonymous 9VcxlFErfAún no hay calificaciones
- Load Flow StudiesDocumento30 páginasLoad Flow StudiesMary Morse100% (2)
- 00489356Documento12 páginas00489356ayyappacrrAún no hay calificaciones
- Typical Power Electronics Circuits in Power Systems: 9.1 HVDC Converter/inverterDocumento10 páginasTypical Power Electronics Circuits in Power Systems: 9.1 HVDC Converter/inverterCông Tử Họ NguyễnAún no hay calificaciones
- A Method For Analyzing Harmonic Distribution in A.C. Power SystemsDocumento10 páginasA Method For Analyzing Harmonic Distribution in A.C. Power SystemsMirla CrespoAún no hay calificaciones
- DC Link CurrentDocumento8 páginasDC Link CurrentsubbannaAún no hay calificaciones
- Stand Alone Self ExcitedDocumento6 páginasStand Alone Self ExcitedSamundra GurungAún no hay calificaciones
- LCI Firing AngleDocumento6 páginasLCI Firing AngleMuthamil KumaranAún no hay calificaciones
- 3D MSC/EMAS Simulation of A Three Phase Power Transformer by Means of Anisotropic Material PropertiesDocumento11 páginas3D MSC/EMAS Simulation of A Three Phase Power Transformer by Means of Anisotropic Material PropertiesConstantin DorinelAún no hay calificaciones
- Controlled RectifiersDocumento19 páginasControlled Rectifiersbalaji1986Aún no hay calificaciones
- Ac DC Load Flow 3phaseDocumento26 páginasAc DC Load Flow 3phaseSajith RpAún no hay calificaciones
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerDocumento12 páginasDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaAún no hay calificaciones
- (C12) PDFDocumento6 páginas(C12) PDFSuhendra Dwi ParanaAún no hay calificaciones
- Bruckner 2005Documento8 páginasBruckner 2005scribdnvnhoAún no hay calificaciones
- Operation of A DSTATCOM in Voltage Control ModeDocumento7 páginasOperation of A DSTATCOM in Voltage Control Modeswathi_ammalu007Aún no hay calificaciones
- 41 - Unity Power Factor Isolated Three-Phase Rectifier With Split Dc-Bus Based On The Scott TransformerDocumento10 páginas41 - Unity Power Factor Isolated Three-Phase Rectifier With Split Dc-Bus Based On The Scott Transformergerson gomesAún no hay calificaciones
- EL93037FUDocumento8 páginasEL93037FUeng.ahmedhassan200Aún no hay calificaciones
- Inductance Measurements For Synchronous MachinesDocumento2 páginasInductance Measurements For Synchronous MachinesYusuf YaşaAún no hay calificaciones
- Space-Vector Modulated Multilevel Matrix Converter: Meng Yeong Lee, Patrick Wheeler, and Christian KlumpnerDocumento10 páginasSpace-Vector Modulated Multilevel Matrix Converter: Meng Yeong Lee, Patrick Wheeler, and Christian KlumpnerakankshiAún no hay calificaciones
- Vector Control of Three Phase AC - DC Front-End ConverterDocumento23 páginasVector Control of Three Phase AC - DC Front-End ConverterRia AlexAún no hay calificaciones
- Three Phase Current Source Inverter Using Space Vector PWM For Grid Connected ApplicationsDocumento4 páginasThree Phase Current Source Inverter Using Space Vector PWM For Grid Connected ApplicationstheijesAún no hay calificaciones
- 2003-Optimum Design of Snubber Capacitors in 9kW Three-Phase InverterDocumento4 páginas2003-Optimum Design of Snubber Capacitors in 9kW Three-Phase InverterGabriel MejiaAún no hay calificaciones
- Space-Vector Modulation in A Two-Phase Induction Motor Drive For Constant-Power OperationDocumento8 páginasSpace-Vector Modulation in A Two-Phase Induction Motor Drive For Constant-Power OperationinfodotzAún no hay calificaciones
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetDe EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetAún no hay calificaciones
- ELEC4100 Complete NotesDocumento150 páginasELEC4100 Complete NotesShittyUsername2013Aún no hay calificaciones
- A Review of AC ChoppersDocumento8 páginasA Review of AC Choppersmjmvp234236Aún no hay calificaciones
- Motor EletrikDocumento6 páginasMotor EletrikAshok GuevaraAún no hay calificaciones
- Low Cost Digital Signal Generation For Driving Space Vector PWM InverterDocumento12 páginasLow Cost Digital Signal Generation For Driving Space Vector PWM InverterJunaid AhmadAún no hay calificaciones
- A Space Vector-Based Rectifier Regulator For AC DC AC ConvertersDocumento7 páginasA Space Vector-Based Rectifier Regulator For AC DC AC ConvertersSofia FrlAún no hay calificaciones
- Matlab-Simulink Model Three-Phase Voltage Source InverterDocumento5 páginasMatlab-Simulink Model Three-Phase Voltage Source InverterDương Tấn TàiAún no hay calificaciones
- Comparing Impact of STATCOM and SSSC On The Performance of Digital Distance RelayDocumento7 páginasComparing Impact of STATCOM and SSSC On The Performance of Digital Distance RelayJimmy Alexander BarusAún no hay calificaciones
- 3 Phase Full Wave Bridge ConverterDocumento4 páginas3 Phase Full Wave Bridge Convertersubhasishpodder100% (1)
- Dynamic Improvement of Induction Generators Connected To Distribution Systems Using A DstatcomDocumento5 páginasDynamic Improvement of Induction Generators Connected To Distribution Systems Using A DstatcomVinod Kumar VudathaAún no hay calificaciones
- Comparison of HVDC Line Models in PSB Simulink BasedDocumento6 páginasComparison of HVDC Line Models in PSB Simulink BasedAlan DrewAún no hay calificaciones
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetCalificación: 2 de 5 estrellas2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetAún no hay calificaciones
- Space Vector Pulse Width Modulation-Libre PDFDocumento6 páginasSpace Vector Pulse Width Modulation-Libre PDFlongAún no hay calificaciones
- Short Circuit Current Forces PDFDocumento4 páginasShort Circuit Current Forces PDFDaniel MemijeAún no hay calificaciones
- Harmonic Reduction in Three-Phase ParallelDocumento6 páginasHarmonic Reduction in Three-Phase ParallelAhmed JanadAún no hay calificaciones
- All About HarmonicsDocumento240 páginasAll About HarmonicsKhushal KharadeAún no hay calificaciones
- Uhc AwatersDocumento60 páginasUhc Awaterskammu9713Aún no hay calificaciones
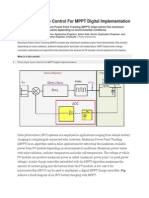
- Direct Duty Cycle Control For MPPT Digital ImplementationDocumento5 páginasDirect Duty Cycle Control For MPPT Digital ImplementationPhạm Văn TưởngAún no hay calificaciones
- (Matsui) Sensorless PM Brushless DC Motor DrivesDocumento9 páginas(Matsui) Sensorless PM Brushless DC Motor DrivesPhạm Văn TưởngAún no hay calificaciones
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsDocumento9 páginasUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngAún no hay calificaciones
- AN296110 Current Sensing For Renewable EnergyDocumento4 páginasAN296110 Current Sensing For Renewable EnergyPhạm Văn TưởngAún no hay calificaciones
- Phan Tich 1 Bai Task 2 by Ngoc BachDocumento4 páginasPhan Tich 1 Bai Task 2 by Ngoc BachPhạm Văn Tưởng100% (1)
- C2000 MCU Real-Time Industrial Control TrainingDocumento4 páginasC2000 MCU Real-Time Industrial Control TrainingPhạm Văn TưởngAún no hay calificaciones
- 1 - Review of Position-Sensorless Operation of Brushless Permanent-Magnet MachinesDocumento11 páginas1 - Review of Position-Sensorless Operation of Brushless Permanent-Magnet MachinesPhạm Văn TưởngAún no hay calificaciones
- Analysis and Simulation of The High-Speed Torque Performance of BrushleDocumento10 páginasAnalysis and Simulation of The High-Speed Torque Performance of BrushlePhạm Văn TưởngAún no hay calificaciones
- Blaabjerg, F. Teodorescu, R. Liserre, M. Timbus, A.V. - Overview of Control and Grid Synchronization For DistributDocumento12 páginasBlaabjerg, F. Teodorescu, R. Liserre, M. Timbus, A.V. - Overview of Control and Grid Synchronization For DistributPhạm Văn TưởngAún no hay calificaciones
- Implementing Field Oriented Control of A Brushless DC MotorDocumento10 páginasImplementing Field Oriented Control of A Brushless DC MotorPhạm Văn TưởngAún no hay calificaciones
- A New Simulation Model of BLDC Motor With Real Back EMF WaveformDocumento4 páginasA New Simulation Model of BLDC Motor With Real Back EMF WaveformPhạm Văn TưởngAún no hay calificaciones
- Analysis of Electric Machinery Krause Manual Solution PDFDocumento2 páginasAnalysis of Electric Machinery Krause Manual Solution PDFKuldeep25% (8)
- Farmer Producer Companies in OdishaDocumento34 páginasFarmer Producer Companies in OdishaSuraj GantayatAún no hay calificaciones
- Oracle Forms & Reports 12.2.1.2.0 - Create and Configure On The OEL 7Documento50 páginasOracle Forms & Reports 12.2.1.2.0 - Create and Configure On The OEL 7Mario Vilchis Esquivel100% (1)
- AlpaGasus: How To Train LLMs With Less Data and More AccuracyDocumento6 páginasAlpaGasus: How To Train LLMs With Less Data and More AccuracyMy SocialAún no hay calificaciones
- Dialogue Au Restaurant, Clients Et ServeurDocumento9 páginasDialogue Au Restaurant, Clients Et ServeurbanuAún no hay calificaciones
- Pt3 English Module 2018Documento63 páginasPt3 English Module 2018Annie Abdul Rahman50% (4)
- Prelim Examination MaternalDocumento23 páginasPrelim Examination MaternalAaron ConstantinoAún no hay calificaciones
- Parliament of India: Rajya SabhaDocumento64 páginasParliament of India: Rajya SabhaSivapothuraju KonathalaAún no hay calificaciones
- Ozone Therapy - A Clinical Review A. M. Elvis and J. S. EktaDocumento5 páginasOzone Therapy - A Clinical Review A. M. Elvis and J. S. Ektatahuti696Aún no hay calificaciones
- DN Cross Cutting IssuesDocumento22 páginasDN Cross Cutting Issuesfatmama7031Aún no hay calificaciones
- Excon2019 ShowPreview02122019 PDFDocumento492 páginasExcon2019 ShowPreview02122019 PDFSanjay KherAún no hay calificaciones
- Presentation 11Documento14 páginasPresentation 11stellabrown535Aún no hay calificaciones
- Article An Incident and Injury Free Culture Changing The Face of Project Operations Terra117 2Documento6 páginasArticle An Incident and Injury Free Culture Changing The Face of Project Operations Terra117 2nguyenthanhtuan_ecoAún no hay calificaciones
- LM74680 Fasson® Fastrans NG Synthetic PE (ST) / S-2050/ CK40Documento2 páginasLM74680 Fasson® Fastrans NG Synthetic PE (ST) / S-2050/ CK40Nishant JhaAún no hay calificaciones
- Strucure Design and Multi - Objective Optimization of A Novel NPR Bumber SystemDocumento19 páginasStrucure Design and Multi - Objective Optimization of A Novel NPR Bumber System施元Aún no hay calificaciones
- KP Tevta Advertisement 16-09-2019Documento4 páginasKP Tevta Advertisement 16-09-2019Ishaq AminAún no hay calificaciones
- Hima OPC Server ManualDocumento36 páginasHima OPC Server ManualAshkan Khajouie100% (3)
- Lec 33 - Householder MethodDocumento11 páginasLec 33 - Householder MethodMudit SinhaAún no hay calificaciones
- Partes de La Fascia Opteva Y MODULOSDocumento182 páginasPartes de La Fascia Opteva Y MODULOSJuan De la RivaAún no hay calificaciones
- Howard R700X - SPL - INTDocumento44 páginasHoward R700X - SPL - INTJozsefAún no hay calificaciones
- Project ManagementDocumento11 páginasProject ManagementBonaventure NzeyimanaAún no hay calificaciones
- Comparitive Study ICICI & HDFCDocumento22 páginasComparitive Study ICICI & HDFCshah faisal100% (1)
- Theory GraphDocumento23 páginasTheory GraphArthur CarabioAún no hay calificaciones
- Module 1: Overview of Applied Behaviour Analysis (ABA)Documento37 páginasModule 1: Overview of Applied Behaviour Analysis (ABA)PriyaAún no hay calificaciones
- The JHipster Mini Book 2Documento129 páginasThe JHipster Mini Book 2tyulist100% (1)
- Fss Presentation Slide GoDocumento13 páginasFss Presentation Slide GoReinoso GreiskaAún no hay calificaciones
- Carob-Tree As CO2 Sink in The Carbon MarketDocumento5 páginasCarob-Tree As CO2 Sink in The Carbon MarketFayssal KartobiAún no hay calificaciones
- Study 107 - The Doctrine of Salvation - Part 8Documento2 páginasStudy 107 - The Doctrine of Salvation - Part 8Jason MyersAún no hay calificaciones
- Harper Independent Distributor Tri FoldDocumento2 páginasHarper Independent Distributor Tri FoldYipper ShnipperAún no hay calificaciones
- Technical Specification For 33KV VCB BoardDocumento7 páginasTechnical Specification For 33KV VCB BoardDipankar ChatterjeeAún no hay calificaciones