También podría gustarte
- Excavadora Hidráulica (PC200-8 y PC200LC-8)Documento87 páginasExcavadora Hidráulica (PC200-8 y PC200LC-8)jimmy_huamancayo95% (21)
- Testo 350 Manual de InstruccionesDocumento112 páginasTesto 350 Manual de InstruccionesenzobeltranAún no hay calificaciones
- f1 Corriente Elctrica SolucionesDocumento6 páginasf1 Corriente Elctrica Solucionesrosemberg_trujillo100% (1)
- Expediente Tecnico Electrificacion Rural Con Energia Solar FotovoltaicaDocumento14 páginasExpediente Tecnico Electrificacion Rural Con Energia Solar FotovoltaicaMax Chavez100% (2)
- Trabajo Bateria de SeparaciónDocumento32 páginasTrabajo Bateria de SeparaciónIvan Hdez67% (3)
- Cortes Del Cabello Según El RostroDocumento10 páginasCortes Del Cabello Según El RostroSol GutierrezAún no hay calificaciones
- Banco de BateriasDocumento10 páginasBanco de BateriasHector Alfredo De la OAún no hay calificaciones
- Guía Del Sistema de Encendido Convencional y TransistorizadoDocumento11 páginasGuía Del Sistema de Encendido Convencional y TransistorizadoSebastian LlerenaAún no hay calificaciones
- Informe de Laboratorio de FisDocumento17 páginasInforme de Laboratorio de FishonnhiAún no hay calificaciones
- Manual Linseg Max1 RF Max12 SmaxDocumento17 páginasManual Linseg Max1 RF Max12 SmaxGerson Depablos80% (5)
- Mplab X y c18 - InterrupcionesDocumento4 páginasMplab X y c18 - InterrupcionesPedro SánchezAún no hay calificaciones
- Sensores Infrarrojos (Qrd1114 y Cny70)Documento2 páginasSensores Infrarrojos (Qrd1114 y Cny70)Pedro SánchezAún no hay calificaciones
- MPLAB X Y C18 - LEDs SECUENCIALESDocumento4 páginasMPLAB X Y C18 - LEDs SECUENCIALESPedro SánchezAún no hay calificaciones
- Mplab X y c18 - Led IntermitenteDocumento4 páginasMplab X y c18 - Led IntermitentePedro SánchezAún no hay calificaciones
- Sensor Infrarojo Is471fDocumento2 páginasSensor Infrarojo Is471fPedro SánchezAún no hay calificaciones
- Alternar Encendido de Dos Leds Con Pic12f675Documento3 páginasAlternar Encendido de Dos Leds Con Pic12f675Pedro Sánchez0% (1)
- Entrenadora-Pics - Modulo de 8 Entradas o SalidasDocumento3 páginasEntrenadora-Pics - Modulo de 8 Entradas o SalidasPedro SánchezAún no hay calificaciones
- Mplab X y c18 - Encender y Apagar Un Led Con Un BotonDocumento4 páginasMplab X y c18 - Encender y Apagar Un Led Con Un BotonPedro SánchezAún no hay calificaciones
- Entrenadora-Pics - Modulo para Pics de 40 PinesDocumento8 páginasEntrenadora-Pics - Modulo para Pics de 40 PinesPedro SánchezAún no hay calificaciones
- Crear Un Proyecto en Eagle (Esquematico y Ruteado)Documento8 páginasCrear Un Proyecto en Eagle (Esquematico y Ruteado)Ivan RomoAún no hay calificaciones
- Control Del Puerto Paralelo Con Visual Basic 6.0Documento7 páginasControl Del Puerto Paralelo Con Visual Basic 6.0Pedro SánchezAún no hay calificaciones
- Reset Por Hardware en Un PicDocumento1 páginaReset Por Hardware en Un PicUfoLeds CncAún no hay calificaciones
- Encender y Apargar Un Relevador Con Vb6 y Puerto LTPDocumento1 páginaEncender y Apargar Un Relevador Con Vb6 y Puerto LTPPedro SánchezAún no hay calificaciones
- Contador de 0 A 9 Con Pic16f84aDocumento4 páginasContador de 0 A 9 Con Pic16f84aPedro SánchezAún no hay calificaciones
- Control Fotoelectrico (Luz Automatica)Documento1 páginaControl Fotoelectrico (Luz Automatica)Pedro SánchezAún no hay calificaciones
- Temporizador o Generador de PulsosDocumento2 páginasTemporizador o Generador de PulsosPedro SánchezAún no hay calificaciones
- Mplab X y C18 - Sentencias Repetitivas y SelectivasDocumento5 páginasMplab X y C18 - Sentencias Repetitivas y SelectivasPedro SánchezAún no hay calificaciones
- Oscilador Por Hardware en Un PicDocumento3 páginasOscilador Por Hardware en Un PicPedro SánchezAún no hay calificaciones
- MPLAB X Y C18 - USO DE LA LIBRERÍA Delays.hDocumento1 páginaMPLAB X Y C18 - USO DE LA LIBRERÍA Delays.hPedro SánchezAún no hay calificaciones
- Mplab X y c18 - OperadoresDocumento3 páginasMplab X y c18 - OperadoresPedro SánchezAún no hay calificaciones
- Sensor para Led Con Fotorresistencia (LDR)Documento7 páginasSensor para Led Con Fotorresistencia (LDR)Erick Escogido EscobedoAún no hay calificaciones
- Multivibrador Astable Con TransistoresDocumento3 páginasMultivibrador Astable Con TransistoresPedro SánchezAún no hay calificaciones
- Mplab X y c18 - Crear Nuevo ProyectoDocumento5 páginasMplab X y c18 - Crear Nuevo ProyectoPedro SánchezAún no hay calificaciones
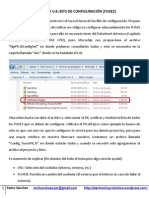
- Mplab X y C18 - Bits de Configuración (Fuses)Documento5 páginasMplab X y C18 - Bits de Configuración (Fuses)Pedro SánchezAún no hay calificaciones
- Invertir El Giro de Un Motor de CD Con El l293b o l293dDocumento4 páginasInvertir El Giro de Un Motor de CD Con El l293b o l293dPedro SánchezAún no hay calificaciones
- Introducción A Los Resistores y Código de ColoresDocumento5 páginasIntroducción A Los Resistores y Código de ColoresPedro Sánchez100% (1)
- Introducción A Las Compuertas LógicasDocumento6 páginasIntroducción A Las Compuertas LógicasPedro Sánchez67% (3)
- Fuente de Alimentacion SimetricaDocumento6 páginasFuente de Alimentacion SimetricaPedro SánchezAún no hay calificaciones
- Fuente de Alumentación de 5 VoltsDocumento4 páginasFuente de Alumentación de 5 VoltsPedro SánchezAún no hay calificaciones
- Guía del usuario DCTG 221/225 - Configuración y uso de la bocina inalámbricaDocumento18 páginasGuía del usuario DCTG 221/225 - Configuración y uso de la bocina inalámbricaJorge Santander BAún no hay calificaciones
- Elementos Activos y Pasivos de Un CircuitoDocumento3 páginasElementos Activos y Pasivos de Un CircuitoAlexander Barboza AnayaAún no hay calificaciones
- Satellite L45-B4218SL Spec SPDocumento4 páginasSatellite L45-B4218SL Spec SPSteve YacolcaAún no hay calificaciones
- Honeywell ID-3000 Manual de Funcionamiento 2005Documento67 páginasHoneywell ID-3000 Manual de Funcionamiento 2005alejj2010Aún no hay calificaciones
- Reciclaje de Chatarra de PlomoDocumento7 páginasReciclaje de Chatarra de Plomoaugusto hitlerAún no hay calificaciones
- RC 275 AcumuladoresDocumento18 páginasRC 275 AcumuladoresDalia Aidee HernandezAún no hay calificaciones
- Sistemas de Transporte Robotizado STILL ARTISTERILDocumento31 páginasSistemas de Transporte Robotizado STILL ARTISTERILJoaquin Mec100% (1)
- Maquinaria Construccion ConsejosDocumento65 páginasMaquinaria Construccion ConsejosArmando Elias Cori TrujilloAún no hay calificaciones
- NFPA 110 - Estándar para Sistemas de Potencia de Emergencia y de Respaldo (Generadores Elec.) - Edicion 2010 PDFDocumento41 páginasNFPA 110 - Estándar para Sistemas de Potencia de Emergencia y de Respaldo (Generadores Elec.) - Edicion 2010 PDFgiulianogjAún no hay calificaciones
- Sistema ElectricoDocumento233 páginasSistema ElectricoAngel FialloAún no hay calificaciones
- Fpa 1000 UlDocumento6 páginasFpa 1000 UlDiego Humberto Brito CamposAún no hay calificaciones
- Instalación de antinieblas delanteros para Volkswagen Fox/SuranDocumento28 páginasInstalación de antinieblas delanteros para Volkswagen Fox/SuranAnonymous BLs1kyJ0kzAún no hay calificaciones
- Manual de Usuario Pulsar 200 0Documento30 páginasManual de Usuario Pulsar 200 0nossnAún no hay calificaciones
- UNIDAD XIV Acumuladores HidráulicosDocumento16 páginasUNIDAD XIV Acumuladores HidráulicosMIGUEL PEÑAAún no hay calificaciones
- Unidad AcondicionadoraDocumento48 páginasUnidad AcondicionadoraIsabel C. Vigueras LiceaAún no hay calificaciones
- Informe Previo de Circuito RCDocumento4 páginasInforme Previo de Circuito RCLuis Alva FuertesAún no hay calificaciones
- Manual Andes Loft Correciones 07 OCTUBRE 13Documento27 páginasManual Andes Loft Correciones 07 OCTUBRE 13MauroZJAún no hay calificaciones
- Bateria Modular PetroleraDocumento2 páginasBateria Modular PetroleraAaronFelixGarduzaAún no hay calificaciones
- Impacto Por Pilas y BateriasDocumento11 páginasImpacto Por Pilas y BateriasPeter Rusman Chullo Carlos100% (3)