También podría gustarte
- A Review of Explicit Approximations of Colebrook's Equation: Srbislav GenićDocumento5 páginasA Review of Explicit Approximations of Colebrook's Equation: Srbislav GenićLutfi LailaAún no hay calificaciones
- Efficient Resolution of The Colebrook Equation: Didier Clamond Laboratoire J.-A. Dieudonn E, 06108 Nice Cedex 02, FranceDocumento15 páginasEfficient Resolution of The Colebrook Equation: Didier Clamond Laboratoire J.-A. Dieudonn E, 06108 Nice Cedex 02, FranceDante FreidzonAún no hay calificaciones
- A Fast Numerical Method For Flow Analysis and Blade Design in Centrifugal Pump ImpellersDocumento6 páginasA Fast Numerical Method For Flow Analysis and Blade Design in Centrifugal Pump ImpellersCesar AudivethAún no hay calificaciones
- Lecture Slides 2013-1-1 Taste Backoff MMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMDocumento5 páginasLecture Slides 2013-1-1 Taste Backoff MMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMসাতটি তারার তিমিরAún no hay calificaciones
- Standardization and Certification in Pump EngineeringDocumento1 páginaStandardization and Certification in Pump EngineeringDante FreidzonAún no hay calificaciones
- Predicting Nitrogen Fertilizer Needs For Rice in Arkansas Using Alkaline Hydrolyzable-NitrogenDocumento11 páginasPredicting Nitrogen Fertilizer Needs For Rice in Arkansas Using Alkaline Hydrolyzable-NitrogenDante FreidzonAún no hay calificaciones
- Example of A Flow of A Viscous Incompressible Fluid Around A Sphere at An Arbitrary Reynolds NumberDocumento2 páginasExample of A Flow of A Viscous Incompressible Fluid Around A Sphere at An Arbitrary Reynolds NumberDante FreidzonAún no hay calificaciones
- Hamel' S Theorem: A. W. MarrisDocumento21 páginasHamel' S Theorem: A. W. MarrisDante FreidzonAún no hay calificaciones
- Bologna DeclarationDocumento6 páginasBologna DeclarationHenok Moges KassahunAún no hay calificaciones
- Fluid Dynamics 69: R DG R Dy G DyDocumento1 páginaFluid Dynamics 69: R DG R Dy G DyDante FreidzonAún no hay calificaciones
- Exact Solutions of Time-Dependent Navier-Stokes Equations by Hodograph-Legendre Transformation MethodDocumento12 páginasExact Solutions of Time-Dependent Navier-Stokes Equations by Hodograph-Legendre Transformation MethodShafqat HussainAún no hay calificaciones
- Fluid Dynamics 69: R DG R Dy G DyDocumento1 páginaFluid Dynamics 69: R DG R Dy G DyDante FreidzonAún no hay calificaciones
- A New Low-Reynolds Version of AnDocumento35 páginasA New Low-Reynolds Version of AnDante FreidzonAún no hay calificaciones
- Fitting An Origin-Displaced Logarithmic Spiral To Empirical Data by Differential Evolution Method of Global OptimizationDocumento7 páginasFitting An Origin-Displaced Logarithmic Spiral To Empirical Data by Differential Evolution Method of Global OptimizationDante FreidzonAún no hay calificaciones
- Cover Book - Electronic CircuitsDocumento1 páginaCover Book - Electronic CircuitsDante FreidzonAún no hay calificaciones
- Cover Book - Electronic CircuitsDocumento1 páginaCover Book - Electronic CircuitsDante FreidzonAún no hay calificaciones
- Einstein's Revision To RelativityDocumento7 páginasEinstein's Revision To RelativityDante FreidzonAún no hay calificaciones
- Theory of Vortex Sound (Cambridge Texts in Applied Mathematics) by M. S. HoweDocumento232 páginasTheory of Vortex Sound (Cambridge Texts in Applied Mathematics) by M. S. HoweDante Freidzon100% (1)
- Breakthrough in Conformal Mapping - JDocumento3 páginasBreakthrough in Conformal Mapping - JDante FreidzonAún no hay calificaciones
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2103)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Astm D7830 - D7830M-2013 - 8750Documento3 páginasAstm D7830 - D7830M-2013 - 8750Wael SeoulAún no hay calificaciones
- Bagheri Gavkosh2021Documento17 páginasBagheri Gavkosh2021Dan Alfred SebualaAún no hay calificaciones
- 2000B - Row - Crop - Parts - F-247-0512 - 031214 Model 2000 SeriesDocumento48 páginas2000B - Row - Crop - Parts - F-247-0512 - 031214 Model 2000 SeriesvanchinatanyaAún no hay calificaciones
- General Milling Corp Vs CA (DIGEST)Documento2 páginasGeneral Milling Corp Vs CA (DIGEST)Raima Marjian Sucor100% (1)
- BookingDocumento2 páginasBookingAbhishek Kumar ChaturvediAún no hay calificaciones
- Electronic Service Tool 2020C v1.0 Product Status ReportDocumento6 páginasElectronic Service Tool 2020C v1.0 Product Status ReportHakim GOURAIAAún no hay calificaciones
- Recovering From Intrusions in Distributed Systems With D: Taesoo Kim, Ramesh Chandra, and Nickolai Zeldovich Mit CsailDocumento7 páginasRecovering From Intrusions in Distributed Systems With D: Taesoo Kim, Ramesh Chandra, and Nickolai Zeldovich Mit CsailRoshan PiyushAún no hay calificaciones
- Reversible Motors: Additional InformationDocumento36 páginasReversible Motors: Additional InformationAung Naing OoAún no hay calificaciones
- FDI and FIIDocumento17 páginasFDI and FIIsharathAún no hay calificaciones
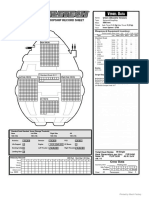
- Union Class Dropship 3025Documento1 páginaUnion Class Dropship 3025A KAún no hay calificaciones
- Latex Hints and TricksDocumento24 páginasLatex Hints and TricksbilzinetAún no hay calificaciones
- 08 Chapter 2Documento61 páginas08 Chapter 2Vivek BelaAún no hay calificaciones
- UST G N 2011: Banking Laws # I. The New Central Bank Act (Ra 7653)Documento20 páginasUST G N 2011: Banking Laws # I. The New Central Bank Act (Ra 7653)Clauds GadzzAún no hay calificaciones
- Huawei Videoconferencing HD Endpoint TE50 Datasheet - 20140221Documento2 páginasHuawei Videoconferencing HD Endpoint TE50 Datasheet - 20140221nuttylAún no hay calificaciones
- Theory and Practice AssignmentDocumento12 páginasTheory and Practice AssignmentMelikteAún no hay calificaciones
- Company Grasim ProfileDocumento48 páginasCompany Grasim ProfileNitu Saini100% (1)
- Project Execution and Control: Lunar International College July, 2021Documento35 páginasProject Execution and Control: Lunar International College July, 2021getahun tesfayeAún no hay calificaciones
- Assignment 1: Unit 3 - Week 1Documento80 páginasAssignment 1: Unit 3 - Week 1sathiyan gsAún no hay calificaciones
- Hach Company v. In-SituDocumento8 páginasHach Company v. In-SituPatent LitigationAún no hay calificaciones
- DSP QBDocumento8 páginasDSP QBNithya VijayaAún no hay calificaciones
- Numerical Simulation of Turbulent Flow Over Surface Mounted Obstacles With Sharp Edges and CornersDocumento19 páginasNumerical Simulation of Turbulent Flow Over Surface Mounted Obstacles With Sharp Edges and CornersHelen ChoiAún no hay calificaciones
- A Case Study On Mahindra's Blue Sense Application Project by RohitDocumento43 páginasA Case Study On Mahindra's Blue Sense Application Project by RohitrohitAún no hay calificaciones
- National Population PolicyDocumento12 páginasNational Population Policymuthukumar100% (3)
- The History of The Evening NewsDocumento14 páginasThe History of The Evening NewsWaqas MahmoodAún no hay calificaciones
- Accounting Graded AssignmentsDocumento19 páginasAccounting Graded AssignmentsAnnela EasyAún no hay calificaciones
- CV WorkbookDocumento28 páginasCV WorkbookRobin LaforêtAún no hay calificaciones
- HRSGDocumento21 páginasHRSGrabia2090Aún no hay calificaciones
- Arts Q1W3Documento44 páginasArts Q1W3LEILANI PELISIGASAún no hay calificaciones
- Account Statement 060922 051222Documento51 páginasAccount Statement 060922 051222allison squad xXAún no hay calificaciones