También podría gustarte
- CastingDocumento5 páginasCastingSapari VelAún no hay calificaciones
- PTC Creo 2.0 m010 Installation GuideDocumento69 páginasPTC Creo 2.0 m010 Installation GuideAnonymous 2b4MvrhAún no hay calificaciones
- The 12 Volt Doctor's Alternator BookDocumento120 páginasThe 12 Volt Doctor's Alternator Bookandutza4u86% (7)
- At2021 - Vi SemDocumento2 páginasAt2021 - Vi SemSapari VelAún no hay calificaciones
- At2029 - Vii SemDocumento2 páginasAt2029 - Vii SemSapari VelAún no hay calificaciones
- RecommendDocumento1 páginaRecommendSapari VelAún no hay calificaciones
- Sheet Metal Design-Handbook-Rev3 PDFDocumento12 páginasSheet Metal Design-Handbook-Rev3 PDFtnchsg100% (1)
- Horse Power ConversionDocumento1 páginaHorse Power ConversionSapari VelAún no hay calificaciones
- St. Peter'S University: Design and Analysis of Knuckle JointDocumento2 páginasSt. Peter'S University: Design and Analysis of Knuckle JointSapari VelAún no hay calificaciones
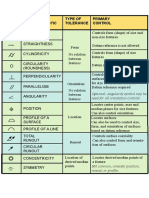
- Geometric tolerances and their characteristicsDocumento1 páginaGeometric tolerances and their characteristicsSapari VelAún no hay calificaciones
- Ae2201 - III SemDocumento3 páginasAe2201 - III SemSapari VelAún no hay calificaciones
- Table of ContentDocumento6 páginasTable of ContentSapari VelAún no hay calificaciones
- Two and Three Wheelers Question Paper Code 71130Documento6 páginasTwo and Three Wheelers Question Paper Code 71130Sapari VelAún no hay calificaciones
- Geo Char ChartDocumento1 páginaGeo Char ChartSapari VelAún no hay calificaciones
- Anna University Report FormatDocumento7 páginasAnna University Report Formatdilip_66690% (10)
- Presentation 1Documento1 páginaPresentation 1Sapari VelAún no hay calificaciones
- Analysis and Design of Molybdenum Knuckle JointDocumento25 páginasAnalysis and Design of Molybdenum Knuckle JointSapari Vel33% (3)
- 2 and 3Documento18 páginas2 and 3Sapari VelAún no hay calificaciones
- DFMAS-Unit 4 NotesDocumento19 páginasDFMAS-Unit 4 NotesSapari VelAún no hay calificaciones
- 2 and 3Documento18 páginas2 and 3Sapari VelAún no hay calificaciones
- ICFTET - 2015registraion FormDocumento2 páginasICFTET - 2015registraion FormSapari VelAún no hay calificaciones
- Combustion Process With Def.Documento11 páginasCombustion Process With Def.Suresh VaddeAún no hay calificaciones
- LicenseDocumento10 páginasLicenseleakAún no hay calificaciones
- Cad&cam R 2013Documento27 páginasCad&cam R 2013Vinay MPAún no hay calificaciones
- ReadmeDocumento1 páginaReadmeSapari VelAún no hay calificaciones
- ReadmeDocumento1 páginaReadmeSapari VelAún no hay calificaciones
- Model Question Paper 2Documento4 páginasModel Question Paper 2Sapari VelAún no hay calificaciones
- Modeling of Diesel Combustion, Soot and NO Emissions Based On A Modified EddyDocumento52 páginasModeling of Diesel Combustion, Soot and NO Emissions Based On A Modified EddyNguyen ChungAún no hay calificaciones
- DFMAS-Unit 4 NotesDocumento19 páginasDFMAS-Unit 4 NotesSapari VelAún no hay calificaciones
- Engine Controls & SensorsDocumento9 páginasEngine Controls & Sensorsrudey18Aún no hay calificaciones
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Gap Analysis of OISD-STD-137 for Electrical SafetyDocumento13 páginasGap Analysis of OISD-STD-137 for Electrical SafetyAvijit DeyAún no hay calificaciones
- Focused Ion BeamDocumento90 páginasFocused Ion BeamLotus DarkAún no hay calificaciones
- Altruistic Punishment in The Classroom - Selterman (3277)Documento5 páginasAltruistic Punishment in The Classroom - Selterman (3277)Laura CortesAún no hay calificaciones
- Comp 12Documento36 páginasComp 12Tanu RdAún no hay calificaciones
- History of Architecture 4: Arkitekturang FilipinoDocumento312 páginasHistory of Architecture 4: Arkitekturang FilipinoIRA CLARIZZE JACOB100% (1)
- Financial Derivatives: Theory, Concepts and Problems #S. L. Gupta #2005Documento4 páginasFinancial Derivatives: Theory, Concepts and Problems #S. L. Gupta #2005Manjunath BolashettiAún no hay calificaciones
- Global Pulse Survey 9th Edition ReportDocumento65 páginasGlobal Pulse Survey 9th Edition ReportZaid Al-Mohammed SalihAún no hay calificaciones
- New World Order 1919 by Samuel Zane BattenDocumento196 páginasNew World Order 1919 by Samuel Zane BattenFreedommkf167% (3)
- 7 Days PMP Exam Cram Workshop - Day 2 PDFDocumento74 páginas7 Days PMP Exam Cram Workshop - Day 2 PDFRana Ahmad AamirAún no hay calificaciones
- Sample Cover Letter For Internship Software EngineeringDocumento8 páginasSample Cover Letter For Internship Software Engineeringfetditwhf100% (1)
- ANSWERDocumento9 páginasANSWERLeesaa88Aún no hay calificaciones
- Write It Right 3.0Documento9 páginasWrite It Right 3.0NazrinHaikalRuslanAún no hay calificaciones
- Placental Transfusion Methods and Factors that Determine MagnitudeDocumento16 páginasPlacental Transfusion Methods and Factors that Determine MagnitudeMustafa SayedAún no hay calificaciones
- Nursing Research Chapter3Documento4 páginasNursing Research Chapter3Sj Cams100% (2)
- SEC B1 Income Statement and Statement of Financial PositionDocumento3 páginasSEC B1 Income Statement and Statement of Financial PositionKəmalə AslanzadəAún no hay calificaciones
- B. Types of Tests On Bricks For BC WorksDocumento5 páginasB. Types of Tests On Bricks For BC WorksSandeepAún no hay calificaciones
- SỬA LỖI SAI TRONG ĐOẠN VĂNDocumento106 páginasSỬA LỖI SAI TRONG ĐOẠN VĂNChi ĐậuAún no hay calificaciones
- 41Cr4 Chemical PDFDocumento2 páginas41Cr4 Chemical PDFGayathriRajasekaranAún no hay calificaciones
- Culture and Management in China J Child & M WarnerDocumento39 páginasCulture and Management in China J Child & M WarnerCharly FezAún no hay calificaciones
- Performance Art: through poiesis, praxis, catharsisDocumento11 páginasPerformance Art: through poiesis, praxis, catharsisPronoy ChakrabortyAún no hay calificaciones
- Hazen Williams Friction Loss Hydraulic TablesDocumento78 páginasHazen Williams Friction Loss Hydraulic TablesMisama NedianAún no hay calificaciones
- Santiago Character SketchDocumento3 páginasSantiago Character SketchWhitCoAún no hay calificaciones
- DiversificationDocumento27 páginasDiversificationPankaj VasudevAún no hay calificaciones
- Chirp Induced Vortices PRA v1 HighlightedDocumento9 páginasChirp Induced Vortices PRA v1 HighlightedShooboAún no hay calificaciones
- Blueprints Psychiatry 6th Edition Ebook PDFDocumento61 páginasBlueprints Psychiatry 6th Edition Ebook PDFpaul.tucker169100% (36)
- Corner James Representation and Landscape 1992Documento26 páginasCorner James Representation and Landscape 1992Adrian Quezada Ruiz100% (1)
- Toyo TdouemaDocumento8 páginasToyo Tdouemavu leAún no hay calificaciones
- Unit 43-Hydraulic, A1, KZHDocumento35 páginasUnit 43-Hydraulic, A1, KZHXiao QiangAún no hay calificaciones
- Dental DictionaryDocumento54 páginasDental DictionaryKatherine BinsolAún no hay calificaciones
- Minesight - Designing Cuts For STP and Calculating Reserves With ReserveDocumento38 páginasMinesight - Designing Cuts For STP and Calculating Reserves With ReserveDody100% (1)