También podría gustarte
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- CG Photo Editing2Documento3 páginasCG Photo Editing2Mylene55% (11)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- CII Sohrabji Godrej GreenDocumento30 páginasCII Sohrabji Godrej GreenRITHANYAA100% (2)
- Hockney-Falco Thesis: 1 Setup of The 2001 PublicationDocumento6 páginasHockney-Falco Thesis: 1 Setup of The 2001 PublicationKurayami ReijiAún no hay calificaciones
- US20170040856A1Documento17 páginasUS20170040856A1jalilemadiAún no hay calificaciones
- US10714996B2Documento10 páginasUS10714996B2jalilemadiAún no hay calificaciones
- Design of Low-Torque-Ripple Synchronous Reluctance MotorsDocumento8 páginasDesign of Low-Torque-Ripple Synchronous Reluctance MotorsjalilemadiAún no hay calificaciones
- US20180233974A1Documento11 páginasUS20180233974A1jalilemadiAún no hay calificaciones
- TG-0059 - 17 TM4 SUMO HD Ops and Maint GuideDocumento62 páginasTG-0059 - 17 TM4 SUMO HD Ops and Maint GuidejalilemadiAún no hay calificaciones
- 20170905061540BH150EDocumento4 páginas20170905061540BH150EjalilemadiAún no hay calificaciones
- United States Patent: Obry Et AlDocumento18 páginasUnited States Patent: Obry Et AljalilemadiAún no hay calificaciones
- Stampa PDFDocumento1 páginaStampa PDFjalilemadiAún no hay calificaciones
- Traction Drive HES880 - Flyer - 3AUA0000161471 - RevF - EN PDFDocumento2 páginasTraction Drive HES880 - Flyer - 3AUA0000161471 - RevF - EN PDFjalilemadiAún no hay calificaciones
- An Investigation On The Cooling System of SynchronDocumento8 páginasAn Investigation On The Cooling System of SynchronjalilemadiAún no hay calificaciones
- Optimal Design of IPM Motors With Different Cooling Systems and WDocumento18 páginasOptimal Design of IPM Motors With Different Cooling Systems and WjalilemadiAún no hay calificaciones
- Remy Pds - hvh410 150 Sheet Euro PR 3 16Documento2 páginasRemy Pds - hvh410 150 Sheet Euro PR 3 16jalilemadiAún no hay calificaciones
- Samicapor Acc 366.55-10-374.15 PDFDocumento4 páginasSamicapor Acc 366.55-10-374.15 PDFjalilemadiAún no hay calificaciones
- Gojko Joksimovic 503 PDFDocumento5 páginasGojko Joksimovic 503 PDFjalilemadiAún no hay calificaciones
- Prinom B 2083 TDS PDFDocumento2 páginasPrinom B 2083 TDS PDFjalilemadiAún no hay calificaciones
- Calmicaglas 2005 TDS PDFDocumento2 páginasCalmicaglas 2005 TDS PDFjalilemadiAún no hay calificaciones
- Calmicaglas 2005, 0409: A Constantia Iso AG CompanyDocumento3 páginasCalmicaglas 2005, 0409: A Constantia Iso AG CompanyjalilemadiAún no hay calificaciones
- Advanced Electrical Machines and Machine-Based Systems For Electric and Hybrid VehiclesDocumento25 páginasAdvanced Electrical Machines and Machine-Based Systems For Electric and Hybrid VehiclesjalilemadiAún no hay calificaciones
- Difference Between Polyester Resin and Epoxy ResinDocumento4 páginasDifference Between Polyester Resin and Epoxy ResinjalilemadiAún no hay calificaciones
- Differential Leakage Reactance in IMDocumento5 páginasDifferential Leakage Reactance in IMjalilemadiAún no hay calificaciones
- Rotor Design For Reduction Harmonic LossesDocumento6 páginasRotor Design For Reduction Harmonic LossesjalilemadiAún no hay calificaciones
- Carter's CoefficientDocumento3 páginasCarter's CoefficientjalilemadiAún no hay calificaciones
- In A On Boules La Ree, Use ADocumento3 páginasIn A On Boules La Ree, Use AjalilemadiAún no hay calificaciones
- GT38LC-3 Locomotive PDFDocumento2 páginasGT38LC-3 Locomotive PDFjalilemadiAún no hay calificaciones
- Samicapor Acc 366.55-10-374.15Documento4 páginasSamicapor Acc 366.55-10-374.15jalilemadiAún no hay calificaciones
- Bushing Insulators: Other Medium Voltage EquipmentDocumento4 páginasBushing Insulators: Other Medium Voltage EquipmentjalilemadiAún no hay calificaciones
- Lesson 1 3 Transes in Reading in Philippine HistoryDocumento17 páginasLesson 1 3 Transes in Reading in Philippine HistoryNAPHTALI WILLIAMS GOAún no hay calificaciones
- AMICO Bar Grating CatalogDocumento57 páginasAMICO Bar Grating CatalogAdnanAún no hay calificaciones
- FHWA Guidance For Load Rating Evaluation of Gusset Plates in Truss BridgesDocumento6 páginasFHWA Guidance For Load Rating Evaluation of Gusset Plates in Truss BridgesPatrick Saint-LouisAún no hay calificaciones
- Module 5 What Is Matter PDFDocumento28 páginasModule 5 What Is Matter PDFFLORA MAY VILLANUEVAAún no hay calificaciones
- Breastfeeding W Success ManualDocumento40 páginasBreastfeeding W Success ManualNova GaveAún no hay calificaciones
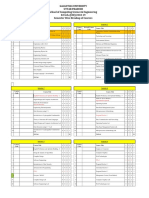
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesDocumento2 páginasGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiAún no hay calificaciones
- (Sat) - 072023Documento7 páginas(Sat) - 072023DhananjayPatelAún no hay calificaciones
- Precursor Effects of Citric Acid and Citrates On Zno Crystal FormationDocumento7 páginasPrecursor Effects of Citric Acid and Citrates On Zno Crystal FormationAlv R GraciaAún no hay calificaciones
- Grade 7 Nap MayDocumento6 páginasGrade 7 Nap Mayesivaks2000Aún no hay calificaciones
- The Scope and Method of Economics: © 2007 Prentice Hall Business Publishing Principles of Economics 8e by Case and FairDocumento36 páginasThe Scope and Method of Economics: © 2007 Prentice Hall Business Publishing Principles of Economics 8e by Case and FairLangson phiriAún no hay calificaciones
- DIR-819 A1 Manual v1.02WW PDFDocumento172 páginasDIR-819 A1 Manual v1.02WW PDFSerginho Jaafa ReggaeAún no hay calificaciones
- JCP4 XDOBursting EngineDocumento13 páginasJCP4 XDOBursting Enginesubhash221103Aún no hay calificaciones
- Vitamins - CyanocobalaminDocumento12 páginasVitamins - CyanocobalaminK PrashasthaAún no hay calificaciones
- Instant Download Business in Action 7Th Edition Bovee Solutions Manual PDF ScribdDocumento17 páginasInstant Download Business in Action 7Th Edition Bovee Solutions Manual PDF ScribdLance CorreaAún no hay calificaciones
- PM Jobs Comp Ir RandDocumento9 páginasPM Jobs Comp Ir Randandri putrantoAún no hay calificaciones
- Case Study - Suprema CarsDocumento5 páginasCase Study - Suprema CarsALFONSO PATRICIO GUERRA CARVAJALAún no hay calificaciones
- The Turning Circle of VehiclesDocumento2 páginasThe Turning Circle of Vehiclesanon_170098985Aún no hay calificaciones
- Financial Market - Bsa 2A Dr. Ben E. Bunyi: Imus Institute of Science and TechnologyDocumento3 páginasFinancial Market - Bsa 2A Dr. Ben E. Bunyi: Imus Institute of Science and TechnologyAsh imoAún no hay calificaciones
- Derma Notes 22pages. DR - Vishwa Medical CoachingDocumento23 páginasDerma Notes 22pages. DR - Vishwa Medical CoachingΝίκος ΣυρίγοςAún no hay calificaciones
- Highlights ASME Guides Preheat PWHT IDocumento4 páginasHighlights ASME Guides Preheat PWHT IArul Edwin Vijay VincentAún no hay calificaciones
- Continuing Professional Development PlanDocumento4 páginasContinuing Professional Development Planvviki50% (2)
- PostScript Quick ReferenceDocumento2 páginasPostScript Quick ReferenceSneetsher CrispyAún no hay calificaciones
- Pediatrics: The Journal ofDocumento11 páginasPediatrics: The Journal ofRohini TondaAún no hay calificaciones
- SW OSDocumento11 páginasSW OSErnest OfosuAún no hay calificaciones
- 40 Sink and FloatDocumento38 páginas40 Sink and Floatleandro hualverdeAún no hay calificaciones
- Contemporary Strategic ManagementDocumento2 páginasContemporary Strategic ManagementZee Dee100% (1)
- 3400 MD IomDocumento52 páginas3400 MD IomIhabAún no hay calificaciones