También podría gustarte
- Procedimiento para Mantenimiento PreventivoDocumento7 páginasProcedimiento para Mantenimiento PreventivoJorge VillacisAún no hay calificaciones
- Electrobisturi Erbe Vio 300 DDocumento12 páginasElectrobisturi Erbe Vio 300 Dedu_3xAún no hay calificaciones
- Procedimiento de Gestion de Contratistas y ProveedoresDocumento3 páginasProcedimiento de Gestion de Contratistas y ProveedoresYeison GarciaAún no hay calificaciones
- Ejercicios Entidad-Relación BBDDDocumento2 páginasEjercicios Entidad-Relación BBDDPaula TrujiAún no hay calificaciones
- Dimensionamiento de Carcamo de BombeoDocumento17 páginasDimensionamiento de Carcamo de Bombeocarlos coelloAún no hay calificaciones
- Practica Semaforo - PLCDocumento5 páginasPractica Semaforo - PLCHunter ZIIAún no hay calificaciones
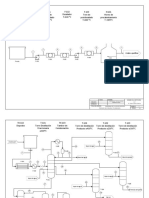
- Diagrama de Refinación de PetroleoDocumento10 páginasDiagrama de Refinación de PetroleoAndreyAún no hay calificaciones
- TESINADocumento23 páginasTESINAmariela rojas rojasAún no hay calificaciones
- MAN30 Fundamentos ComputadoresDocumento300 páginasMAN30 Fundamentos Computadoresignacio fernandez luengo100% (1)
- Cableado EstructuradoDocumento35 páginasCableado EstructuradoNegroel21100% (3)
- Baldarrago Catcoparco Jhair Leds Paneles PublicitariosDocumento69 páginasBaldarrago Catcoparco Jhair Leds Paneles PublicitariosRaul Vela PinedoAún no hay calificaciones
- Cableado EstructuradoDocumento35 páginasCableado EstructuradoNegroel21100% (3)
- Receptor FM de 3 integrados para aprender electrónicaDocumento9 páginasReceptor FM de 3 integrados para aprender electrónicabenjinavaAún no hay calificaciones
- Guia de Lab Oratorio N 1Documento16 páginasGuia de Lab Oratorio N 1edu_3xAún no hay calificaciones
- Sensor Inductivo y CapacitivosDocumento7 páginasSensor Inductivo y Capacitivosedu_3xAún no hay calificaciones
- 4 Historia PDFDocumento196 páginas4 Historia PDFBerny Martinez OvalleAún no hay calificaciones
- Soroban Digital (Sumar y Restar Con Los Dedos)Documento6 páginasSoroban Digital (Sumar y Restar Con Los Dedos)Gregorio PerezAún no hay calificaciones
- Ficha Tecnica Silicone Oximico Cinza Rev 04 18Documento3 páginasFicha Tecnica Silicone Oximico Cinza Rev 04 18Michel MejiaAún no hay calificaciones
- Fundamentos de Gestión CulturalDocumento11 páginasFundamentos de Gestión CulturalNicolás F. Alpízar ValverdeAún no hay calificaciones
- Minicargadores: Características y aplicacionesDocumento25 páginasMinicargadores: Características y aplicacionesRoger UrianAún no hay calificaciones
- 011 Balones de GasDocumento4 páginas011 Balones de GascharivelAún no hay calificaciones
- HolaDocumento5 páginasHolaangie serranoAún no hay calificaciones
- Energia RenovableDocumento16 páginasEnergia RenovableandresAún no hay calificaciones
- Utilización de Dinámicas Grupales en El Taller de Inserción LaboralDocumento5 páginasUtilización de Dinámicas Grupales en El Taller de Inserción LaboralEmy Mendoza AlcalaAún no hay calificaciones
- Programa de nociones básicas de oficinaDocumento4 páginasPrograma de nociones básicas de oficinaLuis Gonzalez100% (1)
- Criticidad de Daños en Correas de CablesDocumento1 páginaCriticidad de Daños en Correas de CablesRamon DiazAún no hay calificaciones
- Instrucciones de Montaje Empalmes LTDocumento7 páginasInstrucciones de Montaje Empalmes LTSantiago LunaAún no hay calificaciones
- Ficha Swep B12Documento2 páginasFicha Swep B12lilymaulenAún no hay calificaciones
- Ejemplo LonMakerDocumento17 páginasEjemplo LonMakerbambizAún no hay calificaciones
- Contaminación AmbientalDocumento7 páginasContaminación AmbientalMafer Lizarraga RosasAún no hay calificaciones
- Sesion de Aprendizaje #02Documento9 páginasSesion de Aprendizaje #02Lilia Ysela Cueva TravezañoAún no hay calificaciones
- Tema 3 - Interconexión de Redes - TCP-IPDocumento23 páginasTema 3 - Interconexión de Redes - TCP-IPBitbreak100% (3)
- Linea de Transmision Tintaya - Socabaya 220 KV: Torres Tipo S1P Cimentaciones Tipo Pilar de Concreto en Roca PerforadaDocumento9 páginasLinea de Transmision Tintaya - Socabaya 220 KV: Torres Tipo S1P Cimentaciones Tipo Pilar de Concreto en Roca PerforadajoreAún no hay calificaciones
- 4° Sesion - Solucion de Problemas y Tomade DecisionesDocumento14 páginas4° Sesion - Solucion de Problemas y Tomade Decisionescarolina poloAún no hay calificaciones
- Manual Common Rail ToyotaDocumento12 páginasManual Common Rail Toyotajunior100% (1)
- Análisis canción AmaneceDocumento3 páginasAnálisis canción AmanecealejandraAún no hay calificaciones