También podría gustarte
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5795)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Mathematics GE REVIEW Session 5Documento72 páginasMathematics GE REVIEW Session 5Broddett Bello Abatayo100% (1)
- Exploring Number Theory Via Diophantine Equations PDFDocumento39 páginasExploring Number Theory Via Diophantine Equations PDFhumejiasAún no hay calificaciones
- Conic Sections Cheat Sheet PDFDocumento2 páginasConic Sections Cheat Sheet PDFBassam ItaniAún no hay calificaciones
- Intro To ParabolasDocumento15 páginasIntro To ParabolasZulfiqar ZulfiqarAún no hay calificaciones
- Demidovic - Reseni Integrali - Zbirka ZadatakaDocumento32 páginasDemidovic - Reseni Integrali - Zbirka ZadatakaDragan100% (2)
- Differential Geometry of CurvesDocumento21 páginasDifferential Geometry of CurvesBhavnaAún no hay calificaciones
- Symbolab Derivatives Cheat Sheet: Derivative RulesDocumento2 páginasSymbolab Derivatives Cheat Sheet: Derivative RulesAkis Kleanthis Manolopoulos100% (1)
- M. Borkovec, W. de Paris and R. Peikert - The Fractal Dimension of The Apollonian Sphere PackingDocumento6 páginasM. Borkovec, W. de Paris and R. Peikert - The Fractal Dimension of The Apollonian Sphere PackingFlaoeramAún no hay calificaciones
- On Systems of Linear Diophantine Equations PDFDocumento6 páginasOn Systems of Linear Diophantine Equations PDFhumejiasAún no hay calificaciones
- Lecture Notes On Orthogonal Polynomials of Several Variables by DR Yaun Xu PDFDocumento54 páginasLecture Notes On Orthogonal Polynomials of Several Variables by DR Yaun Xu PDFhumejiasAún no hay calificaciones
- On Quaternary Quadratic Diophantine Equations PDFDocumento5 páginasOn Quaternary Quadratic Diophantine Equations PDFhumejiasAún no hay calificaciones
- Lecture Notes in Ordered Sets by DR Tero HarjuDocumento77 páginasLecture Notes in Ordered Sets by DR Tero HarjuhumejiasAún no hay calificaciones
- Fractional Derivatives PDFDocumento8 páginasFractional Derivatives PDFhumejiasAún no hay calificaciones
- Kalaiyarasan Eg CPDocumento15 páginasKalaiyarasan Eg CPKalai ArasanAún no hay calificaciones
- Lectures On Lie Groups - D. Milicic PDFDocumento153 páginasLectures On Lie Groups - D. Milicic PDFManuel RiosAún no hay calificaciones
- 1986 - Arnold First Steps in Symplectic TopologyDocumento22 páginas1986 - Arnold First Steps in Symplectic TopologyJunjie Luo100% (1)
- I. Objective: June 10, 2020Documento3 páginasI. Objective: June 10, 2020dennisAún no hay calificaciones
- Online Week 5&6Documento17 páginasOnline Week 5&6Rondex PabloAún no hay calificaciones
- Prelim - PrecalDocumento4 páginasPrelim - PrecalAPRIL ROJOAún no hay calificaciones
- Pre CalculusDocumento12 páginasPre CalculusMonica Joyce NaperiAún no hay calificaciones
- Conic Sections PDFDocumento20 páginasConic Sections PDFestherfe rafaelaAún no hay calificaciones
- Laplace Table PDFDocumento2 páginasLaplace Table PDFsabrinahandikaAún no hay calificaciones
- Maths f5Documento10 páginasMaths f5Aaron LajaAún no hay calificaciones
- Analytic Geometry 2-HandoutsDocumento2 páginasAnalytic Geometry 2-HandoutsYden C SilvestreAún no hay calificaciones
- Conic Sections Conic sections: θ2 = 90° (Only one nappe ofDocumento10 páginasConic Sections Conic sections: θ2 = 90° (Only one nappe ofSteveMathewKuruvillaAún no hay calificaciones
- Dawson College: Department of MathematicsDocumento14 páginasDawson College: Department of Mathematicsadcyechicon123Aún no hay calificaciones
- Bezier CurveDocumento9 páginasBezier CurvePathul02Aún no hay calificaciones
- Handout 2Documento6 páginasHandout 2Marvin Yebes ArceAún no hay calificaciones
- Sphere PDFDocumento12 páginasSphere PDFAvishek KumarAún no hay calificaciones
- Maths Mira RoadDocumento2 páginasMaths Mira Road620-GAURAVKUMAR JAISWALAún no hay calificaciones
- ErrataDocumento4 páginasErrata밥도둑Aún no hay calificaciones
- Lecture 17 - Representation Theory of Lie Groups and Lie Algebras (Schuller's Geometric Anatomy of Theoretical Physics)Documento12 páginasLecture 17 - Representation Theory of Lie Groups and Lie Algebras (Schuller's Geometric Anatomy of Theoretical Physics)Simon ReaAún no hay calificaciones
- Mathematics Ellipse PDFDocumento5 páginasMathematics Ellipse PDFYash jainAún no hay calificaciones
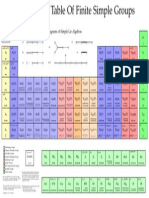
- Periodic Table of GroupsDocumento1 páginaPeriodic Table of GroupsJuan Pablo NeiraAún no hay calificaciones
- Expanded Integral TableDocumento4 páginasExpanded Integral TablefytechAún no hay calificaciones
- Table of Laplace Transforms: Heaviside Function Dirac Delta FunctionDocumento2 páginasTable of Laplace Transforms: Heaviside Function Dirac Delta FunctionCornelo BunyiAún no hay calificaciones
- Parabola 1Documento64 páginasParabola 1Prince JaiswalAún no hay calificaciones