También podría gustarte
- Module 3Documento27 páginasModule 3varun186Aún no hay calificaciones
- ddr3-vip-dsDocumento3 páginasddr3-vip-dsvarun186Aún no hay calificaciones
- Technical Reference ManualDocumento100 páginasTechnical Reference Manualvarun186Aún no hay calificaciones
- Basic Electronics module 1Documento13 páginasBasic Electronics module 1varun186Aún no hay calificaciones
- QuestionsDocumento1 páginaQuestionsvarun186Aún no hay calificaciones
- 10EC56Documento16 páginas10EC56varun186Aún no hay calificaciones
- Why Test Frequency Is Lower Than Functional Frequency in DFTDocumento1 páginaWhy Test Frequency Is Lower Than Functional Frequency in DFTvarun186Aún no hay calificaciones
- Semiconductor MemoriesDocumento81 páginasSemiconductor MemoriesYash DodiaAún no hay calificaciones
- EE434 ASIC Digital Systems Lab Guide: Automatic Layout GenerationDocumento47 páginasEE434 ASIC Digital Systems Lab Guide: Automatic Layout Generationijalab1Aún no hay calificaciones
- Wallace Tree MultiplierDocumento5 páginasWallace Tree Multipliervarun186Aún no hay calificaciones
- From Fourier Series To Fourier Integral: e X E, e eDocumento10 páginasFrom Fourier Series To Fourier Integral: e X E, e evarun186Aún no hay calificaciones
- PDF Vlsi DSP Sb-Vlsi Design FlowDocumento8 páginasPDF Vlsi DSP Sb-Vlsi Design FlowgypeeAún no hay calificaciones
- Common Drain Amplifier or Source Follower: 1. Low Frequency Small Signal Equivalent CircuitDocumento16 páginasCommon Drain Amplifier or Source Follower: 1. Low Frequency Small Signal Equivalent CircuitPadaliya ShreyaAún no hay calificaciones
- Device matching mechanisms and layout techniquesDocumento41 páginasDevice matching mechanisms and layout techniquesvarun186Aún no hay calificaciones
- DelayDocumento31 páginasDelayvarun186Aún no hay calificaciones
- Bode PlotsDocumento8 páginasBode Plotsselaroth168Aún no hay calificaciones
- Frequency CompensationDocumento17 páginasFrequency CompensationErebus OneirosAún no hay calificaciones
- Train No IndexDocumento7 páginasTrain No Indexvarun186Aún no hay calificaciones
- Twenty19 Smart Student Resume GuideDocumento46 páginasTwenty19 Smart Student Resume GuidePraful ChandraAún no hay calificaciones
- 27 2 HenningDocumento23 páginas27 2 Henningvarun186Aún no hay calificaciones
- Expert Training on Verilog FIFO DesignDocumento23 páginasExpert Training on Verilog FIFO DesignGupta AakashAún no hay calificaciones
- No66e 04Documento8 páginasNo66e 04varun186Aún no hay calificaciones
- Project No. Ez2984Documento6 páginasProject No. Ez2984varun186Aún no hay calificaciones
- Route MapDocumento1 páginaRoute Mapkaushikmanindra1989Aún no hay calificaciones
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Object Oriented Methods A Foundation PDFDocumento2 páginasObject Oriented Methods A Foundation PDFAngelAún no hay calificaciones
- Ahk 2Documento59 páginasAhk 2Zesorith ThunderAún no hay calificaciones
- HIBERNATE-GUIDEDocumento330 páginasHIBERNATE-GUIDESrinivasaRao KondarajuAún no hay calificaciones
- Lexmark Firmware Job AidDocumento3 páginasLexmark Firmware Job Aidluismiguel1789Aún no hay calificaciones
- Session-4 - Control StatementsDocumento10 páginasSession-4 - Control Statementsandrajub4uAún no hay calificaciones
- Industrial Internship DiaryDocumento30 páginasIndustrial Internship Diaryvineela namaAún no hay calificaciones
- MATLAB intro titleDocumento5 páginasMATLAB intro titleSarath ChandraAún no hay calificaciones
- VHDL Intro Lecture Signals and Data TypesDocumento16 páginasVHDL Intro Lecture Signals and Data TypesAmmar AlkindyAún no hay calificaciones
- How To Correlate JMS Messages (NW7.0) PDFDocumento33 páginasHow To Correlate JMS Messages (NW7.0) PDFcjo4scribdAún no hay calificaciones
- SQL MCQSDocumento116 páginasSQL MCQSVandana DulaniAún no hay calificaciones
- Test Result JDA ImplementationDocumento18 páginasTest Result JDA ImplementationNaek OmpusungguAún no hay calificaciones
- Oracle CTSDocumento62 páginasOracle CTSRambabu Murakonda0% (1)
- Who Knew BoomDocumento511 páginasWho Knew BoomKevin ItwaruAún no hay calificaciones
- Upgrade Oracle Database From 11g To 12c Using The RMAN BackupDocumento13 páginasUpgrade Oracle Database From 11g To 12c Using The RMAN Backupmadan reddyAún no hay calificaciones
- General Performance Advice For SAP ABAP Open SQLDocumento6 páginasGeneral Performance Advice For SAP ABAP Open SQLsudhAún no hay calificaciones
- C# CodingDocumento41 páginasC# CodingPrakash PhondeAún no hay calificaciones
- Meta SQLDocumento9 páginasMeta SQLharikishore14Aún no hay calificaciones
- Computer Science Chapter 6-7 Control Structures & Python FunctionsDocumento24 páginasComputer Science Chapter 6-7 Control Structures & Python FunctionsKavithaAún no hay calificaciones
- Event SchedulerDocumento8 páginasEvent SchedulerIJRASETPublicationsAún no hay calificaciones
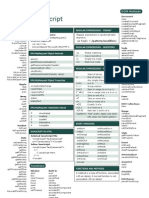
- Javascript Cheat SheetDocumento1 páginaJavascript Cheat SheetAlCatalinAdrianAún no hay calificaciones
- GIT INTERVIEW QUESTIONS GUIDEDocumento10 páginasGIT INTERVIEW QUESTIONS GUIDEKashyapkumarAún no hay calificaciones
- Snowflake Questions 2Documento6 páginasSnowflake Questions 2Pratik KakaniAún no hay calificaciones
- Manage software inventoryDocumento71 páginasManage software inventorySubodhAún no hay calificaciones
- 7-Segment Display Based On ArduinoDocumento7 páginas7-Segment Display Based On ArduinoArshman ShahbazAún no hay calificaciones
- SAP Community Network BlogsDocumento1 páginaSAP Community Network BlogsbabadeAún no hay calificaciones
- Seminar Report GUIDocumento24 páginasSeminar Report GUITabasum KousarAún no hay calificaciones
- Basics of GITLAB CI/CDDocumento15 páginasBasics of GITLAB CI/CDdeepak bansal100% (1)
- Object Oriented ProgrammingDocumento43 páginasObject Oriented ProgramminganruagAún no hay calificaciones
- Java Class Syntax, Inheritance, Interfaces, Abstract Classes, Inner ClassesDocumento3 páginasJava Class Syntax, Inheritance, Interfaces, Abstract Classes, Inner ClassesKönczöl BoldizsárAún no hay calificaciones
- The Design of The NetBSD I/O SubsystemsDocumento287 páginasThe Design of The NetBSD I/O SubsystemsiTiSWRiTTENAún no hay calificaciones