También podría gustarte
- Static Aeroelastic Stiffness Optimization and Investigation of Forward Swept Composite WingsDocumento10 páginasStatic Aeroelastic Stiffness Optimization and Investigation of Forward Swept Composite WingsJan ScarAún no hay calificaciones
- Multilevel Structural Optimization For PreliminaryDocumento15 páginasMultilevel Structural Optimization For PreliminaryJan ScarAún no hay calificaciones
- Comparison of Lumped and Coupled Mass Matrix For Flexible Multibody SimulationDocumento7 páginasComparison of Lumped and Coupled Mass Matrix For Flexible Multibody SimulationMuhammad AbdullahAún no hay calificaciones
- FENET Copenhagen Feb2002 PSO SippelDocumento9 páginasFENET Copenhagen Feb2002 PSO SippelJan ScarAún no hay calificaciones
- Trajectory Tracking For High Aspect-Ratio Flying WingsDocumento18 páginasTrajectory Tracking For High Aspect-Ratio Flying WingsJan ScarAún no hay calificaciones
- Simulation Based Optimisation of Industrial Manufacture of Large Composite Parts by InfusionDocumento5 páginasSimulation Based Optimisation of Industrial Manufacture of Large Composite Parts by InfusionJan ScarAún no hay calificaciones
- Aeroelastic Certification of Light Sport Aircraft1Documento8 páginasAeroelastic Certification of Light Sport Aircraft1Jan ScarAún no hay calificaciones
- Analysis of Natural Laminar Flow Aircraft Based On Airline Network Design and Fleet Assignment - Braun, Wicke, KochDocumento13 páginasAnalysis of Natural Laminar Flow Aircraft Based On Airline Network Design and Fleet Assignment - Braun, Wicke, KochJan ScarAún no hay calificaciones
- Optimization of Hybrid LaminatedDocumento10 páginasOptimization of Hybrid LaminatedJan ScarAún no hay calificaciones
- Numerical Modelling of Blast Events To Design An Innovative Blast Resistant Textile Luggage ContaineriDocumento12 páginasNumerical Modelling of Blast Events To Design An Innovative Blast Resistant Textile Luggage ContaineriJan ScarAún no hay calificaciones
- 12-Aeroelastic Concepts For Flexible WingsDocumento0 páginas12-Aeroelastic Concepts For Flexible WingsJan ScarAún no hay calificaciones
- MSC NastranDocumento6 páginasMSC NastranJan ScarAún no hay calificaciones
- Strut WingDocumento85 páginasStrut WingJan ScarAún no hay calificaciones
- Fixed Free Fixed Free Plate Natural Frequency AnalysisDocumento7 páginasFixed Free Fixed Free Plate Natural Frequency AnalysisJan ScarAún no hay calificaciones
- Virtual Reality in The Aerospace Industry - Dedicated Solutions and Research Fields at EADS Innovation WorksDocumento1 páginaVirtual Reality in The Aerospace Industry - Dedicated Solutions and Research Fields at EADS Innovation WorksJan ScarAún no hay calificaciones
- Multilevel Structural Optimization For PreliminaryDocumento15 páginasMultilevel Structural Optimization For PreliminaryJan ScarAún no hay calificaciones
- 1-Advanced Wind Tunnel Testing of Morphing Aircraft StructuresDocumento16 páginas1-Advanced Wind Tunnel Testing of Morphing Aircraft StructuresJan ScarAún no hay calificaciones
- Probabilistic Modeling of Optimization ErrorsDocumento10 páginasProbabilistic Modeling of Optimization ErrorsJan ScarAún no hay calificaciones
- 2-Adaptive Camber-Morphing Wing Using Zero-Poisson's Ratio HoneycombDocumento23 páginas2-Adaptive Camber-Morphing Wing Using Zero-Poisson's Ratio HoneycombJan ScarAún no hay calificaciones
- Principles of Project Risk ManagementDocumento1 páginaPrinciples of Project Risk ManagementJan ScarAún no hay calificaciones
- A Joined-Wing Structural Weight Modeling StudyDocumento11 páginasA Joined-Wing Structural Weight Modeling StudyJan ScarAún no hay calificaciones
- The Wing GridDocumento33 páginasThe Wing GridJan ScarAún no hay calificaciones
- Aircraft Design Pro 4Documento7 páginasAircraft Design Pro 4Jan ScarAún no hay calificaciones
- Tutorial Questions and Answers - 2011Documento10 páginasTutorial Questions and Answers - 2011Jan ScarAún no hay calificaciones
- The Use of Nodal Point Forces To Improve Element StressesDocumento11 páginasThe Use of Nodal Point Forces To Improve Element StressesJan ScarAún no hay calificaciones
- The Use of Nodal Point Forces To Improve Element StressesDocumento11 páginasThe Use of Nodal Point Forces To Improve Element StressesJan ScarAún no hay calificaciones
- A Review of Explicit Finite ElementDocumento12 páginasA Review of Explicit Finite ElementJan ScarAún no hay calificaciones
- Advancements in The Split Hopkinson BarDocumento94 páginasAdvancements in The Split Hopkinson Bar123456Aún no hay calificaciones
- Principles of Project Risk ManagementDocumento1 páginaPrinciples of Project Risk ManagementJan ScarAún no hay calificaciones
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- 1 - Comparison of BEM and CFD Results For MEXICO Rotor AerodynamicsDocumento8 páginas1 - Comparison of BEM and CFD Results For MEXICO Rotor AerodynamicsMayra ZezattiAún no hay calificaciones
- KUKUDocumento5 páginasKUKUbertinAún no hay calificaciones
- A Critique of BD5 ConceptDocumento9 páginasA Critique of BD5 ConceptTomasz LitwinekAún no hay calificaciones
- Design of A Wing Section in Ground Effect - Application To High SPDocumento369 páginasDesign of A Wing Section in Ground Effect - Application To High SPRogerio Guahy100% (1)
- Computational analysis of plasma actuator on NACA 23012 airfoilDocumento12 páginasComputational analysis of plasma actuator on NACA 23012 airfoilvarun karthikeyanAún no hay calificaciones
- Development of Bell Mouth For Low Speed Axial Flow Compressor Testing FacilityDocumento11 páginasDevelopment of Bell Mouth For Low Speed Axial Flow Compressor Testing FacilityRaHuL PaTeLAún no hay calificaciones
- Bio-Inspired Design of Flapping-Wing Micro Air VehiclesDocumento10 páginasBio-Inspired Design of Flapping-Wing Micro Air VehiclesBlejan DenisAún no hay calificaciones
- Chapter 2 - Lift CharacteristicsDocumento116 páginasChapter 2 - Lift CharacteristicsWaleed PaliAún no hay calificaciones
- Design and Numerical Analysis of A Vertical Take-Off and Landing (VTOL) Fixed Wing Unmanned Aerial Vehicle (UAV)Documento13 páginasDesign and Numerical Analysis of A Vertical Take-Off and Landing (VTOL) Fixed Wing Unmanned Aerial Vehicle (UAV)16054 MD. SAMIUL HASSAN DODULAún no hay calificaciones
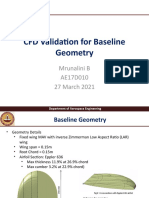
- CFD Validation for Baseline GeometryDocumento6 páginasCFD Validation for Baseline GeometryKarthikeya SrivathsavAún no hay calificaciones
- Baisc Aerodnamic DefinationDocumento34 páginasBaisc Aerodnamic DefinationMohamed HassanAún no hay calificaciones
- Airfoils and WingsDocumento43 páginasAirfoils and WingsRaj ManovaAún no hay calificaciones
- Supersonic WingsDocumento104 páginasSupersonic WingsP KAún no hay calificaciones
- Manoeuvring Simulation of The MUN Explorer AUV Based On The Empirical Hydrodynamics of Axi-Symmetric Bare HullsDocumento11 páginasManoeuvring Simulation of The MUN Explorer AUV Based On The Empirical Hydrodynamics of Axi-Symmetric Bare Hullsali_naghedifarAún no hay calificaciones
- Aircraft Design Project Eight Seater Short Range Business Jet AircraftDocumento119 páginasAircraft Design Project Eight Seater Short Range Business Jet AircraftVignesh Selvaraj89% (9)
- Transonic Report DEN 302Documento17 páginasTransonic Report DEN 302get_moin50% (2)
- Module 8 (Basic Aerodynamics)Documento52 páginasModule 8 (Basic Aerodynamics)AmirAli MohebbiAún no hay calificaciones
- Low Speed Airfoil Data V5 SELIGDocumento363 páginasLow Speed Airfoil Data V5 SELIGChefia100% (3)
- MECH3410 Lab ReportDocumento5 páginasMECH3410 Lab ReportNamit Jain0% (1)
- AerodynamicsDocumento18 páginasAerodynamicsMagesh KumarAún no hay calificaciones
- PPTDocumento13 páginasPPTamns99Aún no hay calificaciones
- Thesis - Balraj Singh 4116879Documento137 páginasThesis - Balraj Singh 4116879Henk GansAún no hay calificaciones
- Wind Tunnel Investigation of PropellerDocumento59 páginasWind Tunnel Investigation of PropellerMol MolAún no hay calificaciones
- S2Documento13 páginasS2Mukesh yadavAún no hay calificaciones
- Configuration Aerodynamics: William H. Mason Virginia Tech Blacksburg, VADocumento6 páginasConfiguration Aerodynamics: William H. Mason Virginia Tech Blacksburg, VASebastian Felipe Cano Bernal100% (1)
- LEAF1 Regional Finals Engineering PortfolioDocumento11 páginasLEAF1 Regional Finals Engineering PortfoliodeepinordAún no hay calificaciones
- Aerodynamics of Gurney Flaps On A Wing in Ground EffectDocumento9 páginasAerodynamics of Gurney Flaps On A Wing in Ground EffectVyssionAún no hay calificaciones
- NACA TN3237 - Hovering Performance of A Helicopter Rotor - Perfiles (Naca 8-H-12)Documento15 páginasNACA TN3237 - Hovering Performance of A Helicopter Rotor - Perfiles (Naca 8-H-12)MB-RPAún no hay calificaciones
- Ndpaper KunzDocumento16 páginasNdpaper KunzEnrico LagonaAún no hay calificaciones
- M.E.ThermalDocumento61 páginasM.E.ThermalMathu DSAún no hay calificaciones