También podría gustarte
- Norma A.130.3Documento6 páginasNorma A.130.3Frank J Castro QAún no hay calificaciones
- CNE Codigo Nacional de ElectricidadDocumento839 páginasCNE Codigo Nacional de Electricidadtramirezs85% (13)
- Exp TecDocumento20 páginasExp TecFrank J Castro QAún no hay calificaciones
- Presurización de escaleras de evacuaciónDocumento6 páginasPresurización de escaleras de evacuaciónFrank J Castro QAún no hay calificaciones
- Manual de Diseño de Puentes 2016 PDFDocumento736 páginasManual de Diseño de Puentes 2016 PDFoshinAún no hay calificaciones
- Capítulo 1 Los Principios Fundamentales - Resistencia de MaterialesDocumento16 páginasCapítulo 1 Los Principios Fundamentales - Resistencia de MaterialesFrank J Castro QAún no hay calificaciones
- Cuadro de Coeficientes de Ocupación Según Uso O Topología Tipología Uso, Ambiente, Espacio O Área Coeficiente O FactorDocumento8 páginasCuadro de Coeficientes de Ocupación Según Uso O Topología Tipología Uso, Ambiente, Espacio O Área Coeficiente O FactorFrank J Castro QAún no hay calificaciones
- Norma A.130.4Documento6 páginasNorma A.130.4Frank J Castro QAún no hay calificaciones
- Norma VariosDocumento10 páginasNorma VariosFrank J Castro QAún no hay calificaciones
- Pinedo Arevalo Miguel Muros Suelo ReforzadoDocumento106 páginasPinedo Arevalo Miguel Muros Suelo ReforzadoHebert Rodríguez SantiagoAún no hay calificaciones
- Ensayos A Cemento Asfáltico PDFDocumento9 páginasEnsayos A Cemento Asfáltico PDFDidier Mansilla RodriguezAún no hay calificaciones
- Corrosión Ambiente MarinoDocumento24 páginasCorrosión Ambiente MarinoCarlos MCzAún no hay calificaciones
- Cemento Asfalico PDFDocumento152 páginasCemento Asfalico PDFVictorJaimesAún no hay calificaciones
- Velocidad de viaje y cuellos de botella en LimaDocumento57 páginasVelocidad de viaje y cuellos de botella en LimaFrank J Castro QAún no hay calificaciones
- Sesión N°1Documento38 páginasSesión N°1Frank J Castro QAún no hay calificaciones
- Lectura de PlanosDocumento87 páginasLectura de PlanosLeidys Paola Daza Molina100% (11)
- Metodo Markoviano CarreterasDocumento76 páginasMetodo Markoviano CarreterasEduardo PSAún no hay calificaciones
- Presentación 1Documento33 páginasPresentación 1Frank J Castro QAún no hay calificaciones
- Inventario Vial PDFDocumento284 páginasInventario Vial PDFKeny Ugarte67% (3)
- Manual para Inspeccion Visual de Pavimentos Rigidos, InviasDocumento65 páginasManual para Inspeccion Visual de Pavimentos Rigidos, InviasIsela RojasAún no hay calificaciones
- TDR Chocas CorregidoDocumento91 páginasTDR Chocas CorregidoFrank J Castro QAún no hay calificaciones
- Upn Fis2 s11Documento15 páginasUpn Fis2 s11Frank J Castro QAún no hay calificaciones
- Formato Apa GeneralDocumento18 páginasFormato Apa GeneralJonathan' Cuotto Dellán'Aún no hay calificaciones
- PDFDocumento66 páginasPDFFrank J Castro QAún no hay calificaciones
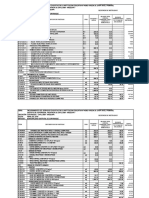
- Metrados ElectricasDocumento20 páginasMetrados ElectricasFrank J Castro QAún no hay calificaciones
- PDFDocumento66 páginasPDFFrank J Castro QAún no hay calificaciones
- Planilla de Metrados ColegioDocumento116 páginasPlanilla de Metrados ColegioAna Huaman CervantesAún no hay calificaciones
- Tesis de PavimentosDocumento167 páginasTesis de PavimentosArturo Car Roj100% (1)
- Presupuesto Participativo 2019Documento37 páginasPresupuesto Participativo 2019Frank J Castro QAún no hay calificaciones
- Problemas de Aplicacion 2019 IDocumento1 páginaProblemas de Aplicacion 2019 IFrank J Castro QAún no hay calificaciones
- Ejercicios 3Documento14 páginasEjercicios 3Ramón Baltazar OlmedoAún no hay calificaciones
- Diagramas de Mezclas Quemadas y Mezclas No QuemadasDocumento2 páginasDiagramas de Mezclas Quemadas y Mezclas No Quemadasrigy mezeta100% (1)
- Seudo PresionDocumento32 páginasSeudo PresionSaavedra Nico100% (1)
- EJEMPLOSDocumento16 páginasEJEMPLOSMax Edinson Mejia DextreAún no hay calificaciones
- Reduccion Al Primer Cuadrante IDocumento4 páginasReduccion Al Primer Cuadrante IProyectos BarneyAún no hay calificaciones
- Informe 1 FinalDocumento15 páginasInforme 1 FinalVania Revillamelgar100% (1)
- 6.2 Diseño Red DistribuciónDocumento8 páginas6.2 Diseño Red DistribuciónKarina Monserrat Garduño ChavezAún no hay calificaciones
- Guía 5 de Matemáticas 6° GradoDocumento15 páginasGuía 5 de Matemáticas 6° GradoandresAún no hay calificaciones
- Examen Final - Semana 8 - Inv - Primer Bloque-Metodos Cuantitativos en Ciencias Sociales - (Grupo1)Documento13 páginasExamen Final - Semana 8 - Inv - Primer Bloque-Metodos Cuantitativos en Ciencias Sociales - (Grupo1)ESTEFANIA FLOREZ CORREAAún no hay calificaciones
- Cantarell III - Memoria Fotografica - SPDocumento23 páginasCantarell III - Memoria Fotografica - SPArturo PérezAún no hay calificaciones
- Absorcion Optica en SemiconductoresDocumento3 páginasAbsorcion Optica en SemiconductoresRafaPriegoLopezAún no hay calificaciones
- Aplicaciones de Funciones TareaDocumento2 páginasAplicaciones de Funciones TareaJair ValderramaAún no hay calificaciones
- Administración de La Producción Ejercicios IIDocumento94 páginasAdministración de La Producción Ejercicios IIAdrián MendozaAún no hay calificaciones
- Resumen Taa PuentesDocumento24 páginasResumen Taa PuentesMiguel DiazAún no hay calificaciones
- Funciones reales de variableDocumento33 páginasFunciones reales de variableJonathan Tafur LuckAún no hay calificaciones
- Laboratorio 3Documento3 páginasLaboratorio 3JIMY23 GonzalezAún no hay calificaciones
- Ejercicios para Word Nivel ESODocumento3 páginasEjercicios para Word Nivel ESOFrancisco BongueAún no hay calificaciones
- Curso Maudez Junio 2020 GBDS2018Documento39 páginasCurso Maudez Junio 2020 GBDS2018Darcy Xavier Rojas GuerreroAún no hay calificaciones
- Preguntas de EconomiaDocumento13 páginasPreguntas de EconomiaValentina OrtízAún no hay calificaciones
- Polaridad de Transformadores MonofasicosDocumento16 páginasPolaridad de Transformadores MonofasicosVeangance DarkAún no hay calificaciones
- Historia métodos numéricosDocumento5 páginasHistoria métodos numéricossantiago acevedoAún no hay calificaciones
- Principios TermodinamicaDocumento13 páginasPrincipios TermodinamicaAlexx WolfmanAún no hay calificaciones
- Los aportes de los antiguos griegosDocumento4 páginasLos aportes de los antiguos griegosAdalis Mernes de OrueAún no hay calificaciones
- Cálculo tamaño muestra investigaciónDocumento4 páginasCálculo tamaño muestra investigaciónMayela Torres ZarzosaAún no hay calificaciones
- Que Es La Función FactorialDocumento7 páginasQue Es La Función FactorialDaniel Martínes floresAún no hay calificaciones
- Tema Programacion LinealDocumento23 páginasTema Programacion LinealElías Salazar EstradaAún no hay calificaciones
- Transportador Helicoidal CemaDocumento76 páginasTransportador Helicoidal CemaJunior De Deus0% (1)
- 23 Mate2Documento235 páginas23 Mate2Claudia pioli100% (1)
- Antropometría, Iluminación, Ventilación, Circulaciones, Asoleamientos y AcústicaDocumento11 páginasAntropometría, Iluminación, Ventilación, Circulaciones, Asoleamientos y AcústicaRacso OscarAún no hay calificaciones
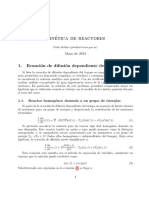
- 8 CinéticaDocumento9 páginas8 CinéticaMaria Emilia VazquezAún no hay calificaciones