International Journal of Application or Innovation in Engineering & Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 7, July 2013 ISSN 2319 - 4847
Implementation of Dynamic Level Scheduling Algorithm using Genetic Operators
Prabhjot Kaur1 and Amanpreet Kaur2
1, 2
M. Tech Research Scholar Department of Computer Science and Engineering Guru Nanak Dev University, Amritsar, Punjab, India
ABSTRACT
Scheduling and mapping of precedence constrained task graphs to the processors is one of the most crucial problems in parallel computing. Due to the NP- completeness of the problem, a large portion of related work is based on heuristic approaches with the objective of finding good solutions within a reasonable amount of time. The major drawback with most of the existing heuristics is that they are evaluated with small problem sizes and their scalability is unknown. In this paper, I have implemented APN Dynamic Level Scheduling algorithm by using genetic operators for task scheduling in parallel multiprocessor system including the communication delays to reduce the completion time and to increase the throughput of the system. The parameters in this paper I have used are makespan time, processor utilization and scheduled length ratio. The graphs show better results of dynamic level scheduling with genetic operators as compared to simple dynamic level scheduling algorithm.
Keywords: DLS algorithm, makespan time, processor utilization, schedule length ratio, genetic operators
1. INTRODUCTION
As the computing power available is increasing day by day, the search for more and more power also keeps increasing. Parallel computing is a form of computation in which many calculations are carried out simultaneously, [1] operating on the principle that large problems can often be divided into smaller ones, which are then solved concurrently ("in parallel"). Parallel processing is the ability to carry out multiple operations or tasks simultaneously. The simultaneous use of more than one CPU or processor core to execute a program or multiple computational threads. Ideally, parallel processing makes programs run faster because there are more engines (CPUs or Cores) running it [2] [3]. Parallel processors are computer systems consisting of multiple processing units connected via some interconnection network and the software needed to make the processing units work together [4]. Parallel processing platform exist in a wide variety of forms [5], [6]. The most common forms are the shared-memory and message-passing architectures. Examples of Shared- memory machines are the BBN Butterfly, the KSR-1 and KSR-2. And examples of Message-passing architectures are Intel iPSC hyper cubes [6], Intel Paragon meshes and CM5.
2. RELATED WORK
Dynamic Task Scheduling using Genetic Algorithms for Heterogeneous Distributed Computing has been developed to dynamically schedule heterogeneous tasks on heterogeneous processors in a distributed system. The scheduler operates in an environment with dynamically changing resources and adapts to variable system resources. It operates in a batch fashion and utilises a genetic algorithm to minimise the total execution time. The existing schedulers are compared to six other schedulers, three batch-mode and three immediate-mode schedulers. Simulations with randomly generated task sets, using uniform, normal, and Poisson distributions, whilst varying the communication overheads between the clients and scheduler have been performed. Results are very efficient. Another venue of further research is to extend the applicability of the proposed parallel genetic algorithm. While they are targeted to be used in APN scheduling the algorithms may be extended to handle BNP and UNC scheduling as well. Some efficient algorithmic techniques for scheduling messages to links need to be sought lest the time complexity of the algorithm increase.
3. PROBLEM DEFINITION
In general, parallel programs are made up of several smaller tasks that depend on each other. This dependency gives us the precedence relationship among tasks. It can be modelled by using a directed acyclic graph (DAG) called a task graph. A DAG represents set of nodes and directed edges. A node represents task and an edge corresponds to communication messages and precedence constraints among the nodes. A task can only start execution after all the data have arrived from its predecessors in the task execution time. The problem definition is implementing a dynamic level scheduling algorithm with the genetic operators to achieve the minimum makespan time, schedule length ratio and
Volume 2, Issue 7, July 2013
Page 388
International Journal of Application or Innovation in Engineering & Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 7, July 2013 ISSN 2319 - 4847
highest processor utilization to find the best optimal result in all generations and get above parameters by applying genetic operators.
4. PROPOSED DYNAMIC LEVEL SCHEDULING ALGORITHM WITH GENETIC OPERATORS
Genetic Algorithm is guided random search technique that mimics the principles of evolution and natural genetics. It searches optimal solution from entire solution space and from a pool of questionnaire data. The main disadvantage of this process is to spend much time for schedule. So to overcome such type of problem a genetic algorithm is proposed to overcome such type of drawback in realistic world according to the users satisfactions and conditions. Here the problem can be solved easily by using the power of genetic algorithm in the field of parallel and distributed computing system processor. The DLSG algorithm uses a quantity called Dynamic Level DL(ti,pj), which is the difference between the maximum sum of computation costs from task ti to an exit task, and the earliest start execution time of ti on processor pj. The DLSG algorithm does not schedule tasks between two previously scheduled tasks. At each scheduling step, the algorithm evaluates the DL values for all combinations of ready tasks and available processors. The best and fittest chromosomes are selected to reproduce offspring. Algorithm 1. Initialize ready node list by inserting all entry node in the task graph. The list is ordered according to node priorities with the highest priority node. 2. While ready node list is not empty do 3. N(i) first node in the list. 4. Call Generate Schedule 5. Repeat step 6 to 9 generations number of times. 6. Call crossover 7. Call mutation 8. Compute the fitness value of each chromosome store fitness value. 9. Call reproduce 10. Compute fitness value. Store result in fitness value select chromosome with best fitness. 11. End while. Generate Schedule 1. Schedule n(i) to the processors which gives highest node. 2. Calculate start time of node, Routing table maintain for each processor. 3. Each entry of table indexed by destination processing element. 4. Routing table will direct message from one machine to along a path with minimum communication time. 5. Shortest path with between the processing elements are stored in routing table. 6. Message is sent, the route from source to destination machine become busy, carrying message of certain amount of time. 7. When message is received its route become free and this route can be used for other processor for transmission of message again. 8. Every time a message sent and message received event is processed the routing table will be updated to profile the direction for fastest communication routes at any time. Crossover Perform the crossover operation of two chromosome pair A and B. C1: Select crossover Generate a random number crossover between 0 and the maximum node of task graph. C2: Do C3 for each processor Pi in chromosome A and B. C3: Find node ni in the processor Pi that has Highest priority node and n j is the node following ni, where c = n i < nj highest for i. C4: Do C5 for each processor Pi in chromosome A and B. C5: Using the crossover site selected in C3 exchange the part of chromosome A and B. Mutation Mutate a chromosome to form new chromosome. M1: Randomly pick node n i M2: Randomly pick node n j Form a new chromosome by exchange the two nodes n i and nj in the chromosome.
Volume 2, Issue 7, July 2013
Page 389
International Journal of Application or Innovation in Engineering & Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 7, July 2013 ISSN 2319 - 4847
Reproduce Population of chromosome Pop and generate new population NEWPOP. R1: Construct roulette wheel: Let Fitness sum be the sum of all the fitness value of chromosome in POP. Form fitness_ sum slot and assign chromosome to occupy number of slots according to their fitness value of the chromosome. R2: Select the first chromosome in POP with highest fitness value. Add this chromosome to NEWPOP. R3: Let NEWPOP be the number of chromosome in POP. Repeat R4 NEWPOP -1 time. R4: Generate Random number between 1 and fitness_sum. Use it to indexbinto the slots to find the corresponding chromosome. Add the chromosome to NewPop.
5. PERFORMANCE EVALUATION
5.1. Graph for schedule length ratio The lesser the values of SLR the more efficient is the algorithm, but the SLR cannot be less than the Critical Path values. Scheduled Length Ratio = Makespan /Critical path SLR value should be less as the numbers of nodes are increases its makespan time must be decreases. Due to this effect as per number of node are increased its SLR ratio should be decrease. Above graph shows when nodes are 36 the slr value is 5.029 and then at node 40 and 42 there is slight increase in slr value but after that slr value decreases when number of nodes increases. At node 70 slr value is least 4.607.
Figure 5.1 schedule length ratio graph for 8 nodes 5.2. Graph for makespan time
Figure: 5.2 makespan time graph for 8 nodes In this experiment, only the proposed scheduling order was used, which meant tasks with higher priority level were scheduled first. Apparently, algorithm resulted as with the increasing the number of nodes (tasks) the makespan time decreases because there is arbitrary number of processors and these nodes are assigned to arbitrary processors in mesh network. As number of nodes increases, the more processors are assigned and if more processors are assigned, the makespan time naturally decreases. Due to this concept the above graph shows makespan time decreases as nodes increases. As graph shows for 36 nodes makespan time per generation is 2931 then as number of nodes increases makespan time decreases. For 70 nodes which is highest the makespan time is least that is 2265.
Volume 2, Issue 7, July 2013
Page 390
International Journal of Application or Innovation in Engineering & Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 7, July 2013 ISSN 2319 - 4847
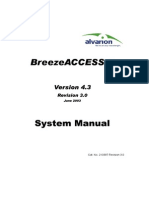
5.3. Graph for processor utilization
Figure: 5.3 processor utilization graph for 8 nodes Processor utilization is the most important aspect of determining the performance of algorithm. The greater the processor utilization the more efficient is the algorithm. In multiprocessor system, processor work in parallel. There can be some scenario when large amount of work is done by one processor and lesser by others, which the work distribution is not proportionate. Processor utilization measure the percent of time for which the processor performed. It is calculated by dividing the execution times of the tasks scheduled on the processor with the makespan time of the algorithm. So when execution time is calculated with the makespan time with the increasing number of nodes, its processor utilization decreases. At 36 nodes, processor utilization is approx 7% but as nodes increases to 50 processor utilization decreases because with increasing nodes there is more work has to be done by single processor. At nodes 60 processor utilization increases by 34% and at nodes 70 decreases.
6. CONCLUSION
In this study we have proposed Genetic Algorithm (GA) for dynamic level scheduling to minimize the makespan time, schedule length ratio to increase the throughput of the system. The processor utilization depends upon the problem size therefore their value varies. The proposed method found a better solution for assigning the tasks to the heterogeneous parallel multiprocessor system. The performance study is based on the best randomly generated schedule of the Genetic Algorithm.
REFERENCES
[1.] Gottlieb, Allan; Almasi, George S. (1989). Highly parallel computing. Redwood City, Calif.: Benjamin/Cummings. ISBN 0-8053-0177-1. [2.] Principles of Parallel Programming by Lin C. and Snyder L. [3.] http://software.intel.com/en-us/articles/how-to-sound-like-a-parallel-programming-expert-part-1-introducingconcurrency-and-parallelism/ [4.] Thomas g. Price, An analysis of central processor scheduling in multi programmed computer systems, digest edition, October 1972. [5.] H. J. Siegel, et al., PASM: A Partitionable SIMD/MIMD System for Image Processing and Pattern Recognition, IEEE Transactions on Computers, vol. C-30, no. 12, Dec. 1981, pp. 934-947. [6.] J. P. Hayes and T. Mudge, Hypercube Supercomputers, Proceedings of the IEEE, vol. 77, no. 12, Dec. 1989. [7.] Introduction to Parallel Computing Author: Blaise Barney, Lawrence Livermore National Laboratory [8.] I. Ahmed, Y. K. Kwok and M. Y. Wu, Analysis, Evaluation, and Comparison of Algorithms for Scheduling Task Graphs on Parallel Processors, International Symposium on Parallel Architectures, Algorithms and Networks, Beijing, China, pp.207-213, Jun, 1996. [9.] Yu-Kwong Kwok, Benchmarking and Comparison of the Task Graph Scheduling Algorithms, Journal of Parallel and Distributed Computing 59, pp.381-422, 1999. [10.] L. D. Davis (Ed.), The Handbook of Genetic Algorithms, New York, Van Nostrand Reinhold, 1991. [11.] G. C. Sih and E. A. Lee, A Compile-Time Scheduling Heuristic for Interconnection Constrained Heterogeneous Processor Architectures, IEEE Transactions on Parallel and Distributed Systems, vol. 4, no. 2, Feb. 1993, pp. 7587. [12.] F. Gruau, G. R. Joubert, F. J. Peters, D. Trystram and D. J. Evans, The Mixed Parallel Genetic Algorithm, Parallel Computing: Trends And Applications (Proc. of the International Conference ParCo 93), 1994, pp. 521524. [13.] Gilbert C. Sih and Edward A. Lee, Dynamic-Level Scheduling For Heterogeneous Processor Networks.
Volume 2, Issue 7, July 2013
Page 391
International Journal of Application or Innovation in Engineering & Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 7, July 2013 ISSN 2319 - 4847
[14.] Yu-Kwong Kwok and Ishfaq Ahmad, A Parallel Genetic-Search-Based Algorithm for Scheduling Arbitrary Task Graphs to Multiprocessors. [15.] Ishfaq Ahmad and Yu-Kwong Kwok, On Parallelizing the Multiprocessor Scheduling Problem. [16.] Heinz M_uhlenbein, Evolution in Time and Space- The Parallel Genetic Algorithm. [17.] Albert Y. Zomaya and Yee-Hwei Teh, Observations on using Genetic Algorithms for Dynamic Load-Balancing, IEEE Transactions on Parallel and Distributed Systems, vol. 12, no. 9, Sep 2001. [18.] Jasbir Singh and Gurvinder Singh, Improved Task Scheduling on Parallel System using Genetic Algorithm, International Journal of Computer Applications (0975 8887) vol 39, no.17, Feb 2012. [19.] Kamaljit Kaur, Amit Chhabra and Gurvinder Singh, Heuristics Based Genetic Algorithm for Scheduling Static Tasks in Homogeneous Parallel System, International Journal of Computer Science and Security (IJCSS), Volume (4): Issue (2).
AUTHOR
Prabhjot Kaur (prabhjot.kaur16@gmail.com) received the B.Tech degree in Computer Science and Engineering from Guru Nanak Dev Engineering College Ludhiana in 2011 and M.Tech degree in Computer Science and Engineering from Guru Nanak Dev University Amritsar in 2013 respectively.
Amanpreet Kaur (preet5189@yahoo.com) received the B.Tech degree in Computer Science and Engineering from DAVIET Jalandhar in 2011 and M.Tech degree in Computer Science and Engineering from Guru Nanak Dev University Amritsar in 2013 respectively.
Volume 2, Issue 7, July 2013
Page 392
También podría gustarte
- Ijait 020602Documento12 páginasIjait 020602ijaitjournalAún no hay calificaciones
- Quick SortDocumento5 páginasQuick SortdmaheshkAún no hay calificaciones
- A Data Throughput Prediction Using Scheduling and Assignment TechniqueDocumento5 páginasA Data Throughput Prediction Using Scheduling and Assignment TechniqueInternational Journal of computational Engineering research (IJCER)Aún no hay calificaciones
- A Genetic Approach For Multiprocessors Task SchedulingDocumento9 páginasA Genetic Approach For Multiprocessors Task SchedulingInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Performance Analysis of Parallel Algorithms On MulDocumento11 páginasPerformance Analysis of Parallel Algorithms On MulRIYA GUPTAAún no hay calificaciones
- Assignment-2 Ami Pandat Parallel Processing: Time ComplexityDocumento12 páginasAssignment-2 Ami Pandat Parallel Processing: Time ComplexityVICTBTECH SPUAún no hay calificaciones
- HPC Unit 456Documento25 páginasHPC Unit 456ShadowOPAún no hay calificaciones
- PDC Assignment Group#7Documento13 páginasPDC Assignment Group#7Sibgha IsrarAún no hay calificaciones
- DAA NotesDocumento200 páginasDAA NotesRaghuAún no hay calificaciones
- Parallel Computing Seminar ReportDocumento35 páginasParallel Computing Seminar ReportAmeya Waghmare100% (3)
- PDCDocumento14 páginasPDCzapperfatterAún no hay calificaciones
- Unit 3 Parallel Programming: Structure NosDocumento26 páginasUnit 3 Parallel Programming: Structure NosChetan SolankiAún no hay calificaciones
- Study of Genetic Algorithm For Process Scheduling in Distributed SystemsDocumento4 páginasStudy of Genetic Algorithm For Process Scheduling in Distributed SystemsInternational Journal of computational Engineering research (IJCER)Aún no hay calificaciones
- Unit: I Fundamentals of Algorithms The Analysis of AlgorithmsDocumento12 páginasUnit: I Fundamentals of Algorithms The Analysis of AlgorithmsPrakash SubramanianAún no hay calificaciones
- Parallel Quicksort Implementation Using Mpi and Pthreads: Puneet Kataria RUID - 117004233Documento14 páginasParallel Quicksort Implementation Using Mpi and Pthreads: Puneet Kataria RUID - 117004233fffAún no hay calificaciones
- DAA NotesDocumento200 páginasDAA Notessuren scribedAún no hay calificaciones
- Final Report: Delft University of Technology, EWI IN4342 Embedded Systems LaboratoryDocumento24 páginasFinal Report: Delft University of Technology, EWI IN4342 Embedded Systems LaboratoryBurlyaev DmitryAún no hay calificaciones
- MJHP - Job Scheduling Algorithm For Cloud Environment: S.Rekha, R.Santhosh KumarDocumento4 páginasMJHP - Job Scheduling Algorithm For Cloud Environment: S.Rekha, R.Santhosh KumarInternational Jpurnal Of Technical Research And ApplicationsAún no hay calificaciones
- Grid ComputingDocumento10 páginasGrid ComputingNaveen KumarAún no hay calificaciones
- Use of DAG in Distributed Parallel ComputingDocumento5 páginasUse of DAG in Distributed Parallel ComputingInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Performance PDFDocumento109 páginasPerformance PDFRafa SoriaAún no hay calificaciones
- CS 807 Task: C: A GPU-based Parallel Ant Colony Algorithm For Scientific Workflow SchedulingDocumento10 páginasCS 807 Task: C: A GPU-based Parallel Ant Colony Algorithm For Scientific Workflow SchedulingSavan SinghAún no hay calificaciones
- Scientific Writing Parallel Computing V2Documento15 páginasScientific Writing Parallel Computing V2VD MirelaAún no hay calificaciones
- A Processor Mapping Strategy For Processor Utilization in A Heterogeneous Distributed SystemDocumento8 páginasA Processor Mapping Strategy For Processor Utilization in A Heterogeneous Distributed SystemJournal of ComputingAún no hay calificaciones
- DAA NotesDocumento223 páginasDAA Notessabahath samreenAún no hay calificaciones
- Task Scheduling in Multiprocessor System Using Genetic AlgorithmDocumento5 páginasTask Scheduling in Multiprocessor System Using Genetic AlgorithmAmit BansalAún no hay calificaciones
- Hkbu Thesis FormatDocumento5 páginasHkbu Thesis Formatihbjtphig100% (2)
- Problem Solving Techunit1Documento25 páginasProblem Solving Techunit1Jasmine SerraoAún no hay calificaciones
- DAA NotesDocumento199 páginasDAA NotesJohn RahulAún no hay calificaciones
- DAA NoTESALLUNITSBYNEELIMADocumento220 páginasDAA NoTESALLUNITSBYNEELIMANeelima MalchiAún no hay calificaciones
- Lec NotesDocumento50 páginasLec Noteshvs1910Aún no hay calificaciones
- Low Memory Cost Dynamic Scheduling of Large Coarse Grain Task GraphsDocumento7 páginasLow Memory Cost Dynamic Scheduling of Large Coarse Grain Task GraphsRosário CunhaAún no hay calificaciones
- DAA NotesDocumento173 páginasDAA NotesNagesh NadigatlaAún no hay calificaciones
- 1Documento11 páginas1aiadaiadAún no hay calificaciones
- "Studies On Implementation and Enhancement of Computational Speed of Computer "Using New Binary Number System"Documento9 páginas"Studies On Implementation and Enhancement of Computational Speed of Computer "Using New Binary Number System"reeta1981Aún no hay calificaciones
- Soto FerrariDocumento9 páginasSoto Ferrarifawzi5111963_7872830Aún no hay calificaciones
- p34 WongDocumento10 páginasp34 WongDavide Carmichael DoninelliAún no hay calificaciones
- Chapter (7) Performance Analysis Techniques: Asmaa Ismail Farah Basil Raua WaleedDocumento46 páginasChapter (7) Performance Analysis Techniques: Asmaa Ismail Farah Basil Raua Waleedmhamed alqucyAún no hay calificaciones
- TT156 EditedDocumento13 páginasTT156 EditedFred MillerAún no hay calificaciones
- Sensors: Metaheuristic Based Scheduling Meta-Tasks in Distributed Heterogeneous Computing SystemsDocumento12 páginasSensors: Metaheuristic Based Scheduling Meta-Tasks in Distributed Heterogeneous Computing SystemsalkimistuAún no hay calificaciones
- A Hybrid Algorithm For Grid Task Scheduling ProblemDocumento5 páginasA Hybrid Algorithm For Grid Task Scheduling ProblemInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- DAA NotesDocumento199 páginasDAA NotesRoushan KumarAún no hay calificaciones
- Schedule 6Documento7 páginasSchedule 6ssfofoAún no hay calificaciones
- Application of Residue Number System To Bioinformatics: Kwara State University, MaleteDocumento14 páginasApplication of Residue Number System To Bioinformatics: Kwara State University, Maletefeezy11Aún no hay calificaciones
- An Introduction To Parallel AlgorithmsDocumento66 páginasAn Introduction To Parallel AlgorithmsErezina Odomero OyegwaAún no hay calificaciones
- DAA Travelling Mini 4101079Documento18 páginasDAA Travelling Mini 4101079Rahul JadhavAún no hay calificaciones
- Assignments Across Time in Distributed Processor: Algorithm OptimalDocumento7 páginasAssignments Across Time in Distributed Processor: Algorithm OptimalswjaffryAún no hay calificaciones
- Solving The Travelling Salesman Problem in Parallel by Genetic Algorithm On Multicomputer ClusterDocumento6 páginasSolving The Travelling Salesman Problem in Parallel by Genetic Algorithm On Multicomputer ClusterDebjyoti DasAún no hay calificaciones
- Assignment # 2: Name: M. NasirDocumento12 páginasAssignment # 2: Name: M. NasirMuhammad UmerAún no hay calificaciones
- Advanced Computer Architecture 1Documento14 páginasAdvanced Computer Architecture 1anilbittuAún no hay calificaciones
- PC 2Documento44 páginasPC 2imsAún no hay calificaciones
- Cse1002 Problem Solving and Object Oriented Programming Lo 1.0 37 Cse1002Documento3 páginasCse1002 Problem Solving and Object Oriented Programming Lo 1.0 37 Cse1002Shiva CharanAún no hay calificaciones
- Scheduling Multithread Computations by Stealing WorkDocumento28 páginasScheduling Multithread Computations by Stealing Workwmeister31Aún no hay calificaciones
- Classification of Task Partitioning and Load Balancing Strategies in Distributed Parallel Computing Systems PDFDocumento5 páginasClassification of Task Partitioning and Load Balancing Strategies in Distributed Parallel Computing Systems PDFeditorinchiefijcsAún no hay calificaciones
- JaJa Parallel - Algorithms IntroDocumento45 páginasJaJa Parallel - Algorithms IntroHernán Misæl50% (2)
- Use of Genetic Algorithm For Balancing The Grid LoadDocumento8 páginasUse of Genetic Algorithm For Balancing The Grid LoadijitjournalAún no hay calificaciones
- Daa SDocumento6 páginasDaa Skolasandeep555Aún no hay calificaciones
- A Preliminary Architecture For A Basic Data-Flow ProcessorDocumento7 páginasA Preliminary Architecture For A Basic Data-Flow ProcessorjackienessAún no hay calificaciones
- Detection of Malicious Web Contents Using Machine and Deep Learning ApproachesDocumento6 páginasDetection of Malicious Web Contents Using Machine and Deep Learning ApproachesInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Study of Customer Experience and Uses of Uber Cab Services in MumbaiDocumento12 páginasStudy of Customer Experience and Uses of Uber Cab Services in MumbaiInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- THE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSDocumento7 páginasTHE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocumento9 páginasAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- The Mexican Innovation System: A System's Dynamics PerspectiveDocumento12 páginasThe Mexican Innovation System: A System's Dynamics PerspectiveInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Analysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyDocumento6 páginasAnalysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Soil Stabilization of Road by Using Spent WashDocumento7 páginasSoil Stabilization of Road by Using Spent WashInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Performance of Short Transmission Line Using Mathematical MethodDocumento8 páginasPerformance of Short Transmission Line Using Mathematical MethodInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Design and Detection of Fruits and Vegetable Spoiled Detetction SystemDocumento8 páginasDesign and Detection of Fruits and Vegetable Spoiled Detetction SystemInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Staycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityDocumento10 páginasStaycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- A Deep Learning Based Assistant For The Visually ImpairedDocumento11 páginasA Deep Learning Based Assistant For The Visually ImpairedInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- A Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)Documento10 páginasA Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)International Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Synthetic Datasets For Myocardial Infarction Based On Actual DatasetsDocumento9 páginasSynthetic Datasets For Myocardial Infarction Based On Actual DatasetsInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Impact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryDocumento8 páginasImpact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Ijaiem 2021 01 28 6Documento9 páginasIjaiem 2021 01 28 6International Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Design and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationDocumento13 páginasDesign and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Swot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictDocumento5 páginasSwot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Anchoring of Inflation Expectations and Monetary Policy Transparency in IndiaDocumento9 páginasAnchoring of Inflation Expectations and Monetary Policy Transparency in IndiaInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- The Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaDocumento5 páginasThe Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- HR Shared Services: Best Practices, Business Model and TechnologyDocumento11 páginasHR Shared Services: Best Practices, Business Model and TechnologypiermeAún no hay calificaciones
- Yamaha P-200Documento65 páginasYamaha P-200EduardoBeltraminoAún no hay calificaciones
- Onkyo HTR 580 Service ManualDocumento94 páginasOnkyo HTR 580 Service ManualCarlosRobertoAún no hay calificaciones
- Professional Data Science Course by MAGES InstituteDocumento24 páginasProfessional Data Science Course by MAGES InstituteJenifer JenkinsAún no hay calificaciones
- Liebert-HPC S 006 022-TS-EN-EMEA-273571Documento54 páginasLiebert-HPC S 006 022-TS-EN-EMEA-273571Breno ETCENGENHARIAAún no hay calificaciones
- ASM2 - Database - GCS200218Documento22 páginasASM2 - Database - GCS200218Scott AvenAún no hay calificaciones
- WyreStorm RX 70 PP UserManualDocumento16 páginasWyreStorm RX 70 PP UserManualleclueheyns31Aún no hay calificaciones
- Servicenow Testinises Csa Exam Question 2023-Jul-01 by Ashburn 248q VceDocumento21 páginasServicenow Testinises Csa Exam Question 2023-Jul-01 by Ashburn 248q VceEstudante ServicenowAún no hay calificaciones
- VLF High Voltage TestDocumento20 páginasVLF High Voltage TestAhmedRaafatAún no hay calificaciones
- Innovative Project - All FormsDocumento16 páginasInnovative Project - All FormsEhlee Eton TubalinalAún no hay calificaciones
- Digital Design Mid-Sem Question PaperDocumento2 páginasDigital Design Mid-Sem Question PaperAbhinav MishraAún no hay calificaciones
- Hydrawise Manual - TroubleshootingDocumento15 páginasHydrawise Manual - TroubleshootingBalazs LosoncziAún no hay calificaciones
- Time Relay Off Delay Datasheet - 3rp1540-1an30 - enDocumento3 páginasTime Relay Off Delay Datasheet - 3rp1540-1an30 - enJUAN CARLOS BERNAL MEJIAAún no hay calificaciones
- myOUM AppDocumento12 páginasmyOUM AppKee CHAún no hay calificaciones
- Design and Implementation of Static RAM Cell: Circuit Diagram of SRAMDocumento4 páginasDesign and Implementation of Static RAM Cell: Circuit Diagram of SRAMkomaladitya challaAún no hay calificaciones
- Electronic Basics #25: Servos and How To Use Them: Servo MotorDocumento13 páginasElectronic Basics #25: Servos and How To Use Them: Servo MotorToàn HerreraAún no hay calificaciones
- 100kva DG Set - 100kva Koel GensetDocumento3 páginas100kva DG Set - 100kva Koel GensetMothilalAún no hay calificaciones
- Latest - Industrial - Symphony Industrial Ai Data Sheets Watchman 360 - Brochure - 20220620Documento3 páginasLatest - Industrial - Symphony Industrial Ai Data Sheets Watchman 360 - Brochure - 20220620MILTON CÉSAR AGUILAR DE AZAMBUJAAún no hay calificaciones
- Kbnkbe Description 0709 enDocumento4 páginasKbnkbe Description 0709 enOrlando CamposAún no hay calificaciones
- Sundeep Yedida IllinoisDocumento2 páginasSundeep Yedida Illinoisapi-3280552Aún no hay calificaciones
- Md. Mahabubur Rahman: ST STDocumento2 páginasMd. Mahabubur Rahman: ST STred zeenAún no hay calificaciones
- CHP 530 To 660 KW PDFDocumento16 páginasCHP 530 To 660 KW PDFJunifero1Aún no hay calificaciones
- CNG Relief Valve v5.1 PDFDocumento2 páginasCNG Relief Valve v5.1 PDFDavid EspinozaAún no hay calificaciones
- Breezeaccess II Instruction ManualDocumento346 páginasBreezeaccess II Instruction ManualMikhail YarovAún no hay calificaciones
- Resistor ThesisDocumento7 páginasResistor ThesisHelpWritingACollegePaperYonkers100% (2)
- Feeder Calc NajamDocumento9 páginasFeeder Calc Najamnst_siddiquiAún no hay calificaciones
- P0903, P0915Documento1 páginaP0903, P0915Joanmanel Sola QuintanaAún no hay calificaciones
- Classic Mac Repair Notes: 2.1 SafetyDocumento31 páginasClassic Mac Repair Notes: 2.1 Safetyamon gusAún no hay calificaciones
- TC Electronic Support - Which Expression Pedal To Use With TC Devices-1Documento3 páginasTC Electronic Support - Which Expression Pedal To Use With TC Devices-1sarag manAún no hay calificaciones
- 424 Amardeep SinghDocumento2 páginas424 Amardeep SinghJuhi ShahAún no hay calificaciones