También podría gustarte
- Manual Básico de FanucDocumento50 páginasManual Básico de FanucMarcos Becerra100% (11)
- Guia Passo A Passo para Atuar Como PeritoDocumento86 páginasGuia Passo A Passo para Atuar Como PeritoIgor CostaAún no hay calificaciones
- Conners ProfessoresDocumento1 páginaConners Professoressuzana lucas100% (1)
- Manual Estudante FanucDocumento328 páginasManual Estudante FanucPhillipedeMagalhães100% (2)
- Curso Manutençao BásicoDocumento166 páginasCurso Manutençao Básicopardalzinho75% (8)
- Curso FanucDocumento7 páginasCurso Fanucduartemr150% (2)
- Desenvolvendo Projetos Poe Modbus Com Comunicação Tcp/ip Programado No PicDe EverandDesenvolvendo Projetos Poe Modbus Com Comunicação Tcp/ip Programado No PicAún no hay calificaciones
- 005-08 Zeramento Eixos Linha D FanucDocumento3 páginas005-08 Zeramento Eixos Linha D FanucCicero Mello100% (1)
- Drives Ge-Fanuc PortuguesDocumento40 páginasDrives Ge-Fanuc PortuguesEduardo Bueno Lemes100% (3)
- Apostila Treinamentotreinamento CNC FanucDocumento22 páginasApostila Treinamentotreinamento CNC FanucGeraldo Maurício73% (11)
- 2 - Manual de Treinamento Linha D V3 - 0 - Siemens 828D PDFDocumento103 páginas2 - Manual de Treinamento Linha D V3 - 0 - Siemens 828D PDFEdgar Sacancela50% (2)
- FANUCDocumento29 páginasFANUCJorgeKovacsAún no hay calificaciones
- Masterização e TCP FANUCDocumento3 páginasMasterização e TCP FANUCfelipe_turbo100% (1)
- S47568-3 Torre Sauter 520Documento50 páginasS47568-3 Torre Sauter 520fbotini32100% (5)
- 081-10 Auto Ajuste Da Torre Duplomatic GLM V2.0 Fanuc 0iTDDocumento6 páginas081-10 Auto Ajuste Da Torre Duplomatic GLM V2.0 Fanuc 0iTDDouglas Rogério de Castro100% (2)
- Manual 21iMB Manutenção Portugues PDFDocumento151 páginasManual 21iMB Manutenção Portugues PDFAntonio Lucas88% (8)
- Como Referenciar Encoder Absoluto em CNC SiemensDocumento3 páginasComo Referenciar Encoder Absoluto em CNC SiemensValdir JuniorAún no hay calificaciones
- Aplicação fuzzy x pid: técnicas de controle em ambientes simuladosDe EverandAplicação fuzzy x pid: técnicas de controle em ambientes simuladosAún no hay calificaciones
- 046-08 - Ajuste Do Encoder Torre SauterDocumento2 páginas046-08 - Ajuste Do Encoder Torre SauterAndr100% (2)
- Manual Basico Robo Fanuc RJ-3 PDFDocumento208 páginasManual Basico Robo Fanuc RJ-3 PDFAllison Diniz Nocera100% (3)
- Procedimento de Reset Dos Dados de NC e PLC PDFDocumento6 páginasProcedimento de Reset Dos Dados de NC e PLC PDFTheo SouzaAún no hay calificaciones
- RomiDocumento23 páginasRomiManutenção Usinagem100% (1)
- CNC Ge Fanuc 63525 PortuguesDocumento152 páginasCNC Ge Fanuc 63525 PortuguesEduardo Bueno Lemes60% (5)
- R65224A-Instruções Técnicas M10Documento52 páginasR65224A-Instruções Técnicas M10Cicero Mello100% (2)
- 338304541-Modulo-Duplomatic en PTDocumento38 páginas338304541-Modulo-Duplomatic en PTjocimar100% (2)
- 150-12 - Zeramento de Eixos - Linha GL V1.0 FanucDocumento10 páginas150-12 - Zeramento de Eixos - Linha GL V1.0 FanucJosé Carlos Terribile0% (1)
- Curso de 840DDocumento4 páginasCurso de 840DLincoln Antonio100% (1)
- Treinamento FANUCDocumento21 páginasTreinamento FANUCasrRG100% (1)
- CNC FANUC FONTE Alarmes Servos ALPHADocumento59 páginasCNC FANUC FONTE Alarmes Servos ALPHAfrancisco moura Moura macedo50% (2)
- Procedimento para Ativar e Desativar Régua Optica - Fanuc 31i MB5Documento1 páginaProcedimento para Ativar e Desativar Régua Optica - Fanuc 31i MB5Domite VianaAún no hay calificaciones
- Sinumerik 840D/810D/FM-NCDocumento517 páginasSinumerik 840D/810D/FM-NCAntonio Lara Muñoz100% (1)
- Transferir Programa Pcin para DaewooDocumento7 páginasTransferir Programa Pcin para DaewoosolincolnAún no hay calificaciones
- Manual AC2510Documento36 páginasManual AC2510Bruce Magalhães100% (4)
- Mach 9aDocumento91 páginasMach 9arodrigo100% (4)
- Motofil RoboticsDocumento69 páginasMotofil Roboticspehhhhh100% (3)
- Curso Fanuc I M07 Programacion 2010 PDFDocumento174 páginasCurso Fanuc I M07 Programacion 2010 PDFEdison MalacaraAún no hay calificaciones
- Procedimento Zeramento Torre (Atualizado) - Mitsubishi M70Documento5 páginasProcedimento Zeramento Torre (Atualizado) - Mitsubishi M70GuiAún no hay calificaciones
- Manual 21iMB Manutencao Portugues PDFDocumento151 páginasManual 21iMB Manutencao Portugues PDFFabricioAún no hay calificaciones
- Desativar Segunda MedicaoDocumento3 páginasDesativar Segunda MedicaoAbimael LopesAún no hay calificaciones
- SINUMERIK 810-840D - Procedimento para A Transferência Do Backup de Dados Através Da Porta Serial Da PCU20 PDFDocumento8 páginasSINUMERIK 810-840D - Procedimento para A Transferência Do Backup de Dados Através Da Porta Serial Da PCU20 PDFeletropaulomococaAún no hay calificaciones
- Cancelar Encoder Medição Direta Spin FanucDocumento2 páginasCancelar Encoder Medição Direta Spin FanucLeonardo Ribeiro100% (1)
- Apostila Siemens CNCDocumento507 páginasApostila Siemens CNClipedalan83% (6)
- 083-10 Ajuste Da Parada Orientada e Ponto de Troca Da Linha D V3 Siemens 828 (ClienteDocumento5 páginas083-10 Ajuste Da Parada Orientada e Ponto de Troca Da Linha D V3 Siemens 828 (ClienteAdeilma Barboza100% (1)
- Procedimento FANUCDocumento1 páginaProcedimento FANUCavalente112Aún no hay calificaciones
- Fanuc R30ibDocumento280 páginasFanuc R30ibClaiton Costa Nunes100% (1)
- Reset Sinumerik 810dDocumento1 páginaReset Sinumerik 810dJéferson Paranhos100% (2)
- Parametros Serie D Port B-64310PO - 02Documento450 páginasParametros Serie D Port B-64310PO - 02Thiago Pires86% (7)
- Apostila RV 2AJDocumento10 páginasApostila RV 2AJDanyel MoraesAún no hay calificaciones
- Rochas MetamórficasDocumento15 páginasRochas MetamórficasjoaoAún no hay calificaciones
- A Luuanda de José Luandino VieiraDocumento17 páginasA Luuanda de José Luandino Vieirataniacmacedo100% (1)
- SDSF - System Display & Search FacilityDocumento25 páginasSDSF - System Display & Search FacilityAlexandre Leite ProençaAún no hay calificaciones
- HW4900 Controlador de TemperaturaDocumento0 páginasHW4900 Controlador de TemperaturaAlfcast IlloAún no hay calificaciones
- 1 Operacional-Manual de TreinamentoDocumento95 páginas1 Operacional-Manual de TreinamentoCaio DinizAún no hay calificaciones
- Coel Tlk49Documento20 páginasCoel Tlk49Essilor_WdealmeiAún no hay calificaciones
- Manualdaoperação QDocumento32 páginasManualdaoperação QLuccas MartinsAún no hay calificaciones
- Manual de Instruções Completo TLK48 Rev.0Documento20 páginasManual de Instruções Completo TLK48 Rev.0Lisias GuimarãesAún no hay calificaciones
- Aula07 RSLogix5000Documento3 páginasAula07 RSLogix5000Luiz RoqueAún no hay calificaciones
- 6 - MicrocontroladoresDocumento20 páginas6 - MicrocontroladoresRene LorenzonAún no hay calificaciones
- Roteiro 2 ManipuladorDocumento5 páginasRoteiro 2 ManipuladorIago HenriqueAún no hay calificaciones
- Manual Instruccoes CN ISODocumento50 páginasManual Instruccoes CN ISOAlcival FerreiraAún no hay calificaciones
- Aula 4 - PWM, Eeprom e InterrupçõesDocumento34 páginasAula 4 - PWM, Eeprom e InterrupçõesFernando ValenteAún no hay calificaciones
- Ficha 8 Nov., 14 - 11º AnoDocumento2 páginasFicha 8 Nov., 14 - 11º AnofurmarioAún no hay calificaciones
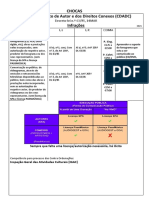
- Chocas Direito de AutorDocumento3 páginasChocas Direito de AutorAthomikAún no hay calificaciones
- Fluxograma Processo Açucar AlcoolDocumento1 páginaFluxograma Processo Açucar AlcoolRodrigo Ramos LottiAún no hay calificaciones
- Biblioteconomia Alexandria em Chamas FichamentoDocumento9 páginasBiblioteconomia Alexandria em Chamas FichamentoOlivia DiasAún no hay calificaciones
- Transtorno de Déficit de Atenção Com Hiperatividade: Medicalização, Classificação e Controle Dos DesviosDocumento90 páginasTranstorno de Déficit de Atenção Com Hiperatividade: Medicalização, Classificação e Controle Dos DesviosSara AlbuquerqueAún no hay calificaciones
- Atividade 6o Ano 2Documento7 páginasAtividade 6o Ano 2Mariana Milbradt CorreaAún no hay calificaciones
- Descritivo Com Fazer Cerveja Com Kit Extrato e GraosDocumento8 páginasDescritivo Com Fazer Cerveja Com Kit Extrato e GraosKati RodriguesAún no hay calificaciones
- Tabela Dos Coeficientes e Fatores Da Vantagem Da Coisa FeitaDocumento1 páginaTabela Dos Coeficientes e Fatores Da Vantagem Da Coisa FeitaSamuelOliveiraAún no hay calificaciones
- Lista 3Documento4 páginasLista 3ghdfgAún no hay calificaciones
- Tecnologia Acondicionamento Produtos TermossensiveisDocumento290 páginasTecnologia Acondicionamento Produtos TermossensiveisYARAAún no hay calificaciones
- Aula 7 - Rochas MetamórficasDocumento60 páginasAula 7 - Rochas MetamórficasJadson FreireAún no hay calificaciones
- Memorial Descritivo SaneamentoDocumento9 páginasMemorial Descritivo Saneamentovinicius frazetoAún no hay calificaciones
- Apostilha - Vetores Mecnica-2011-1Documento13 páginasApostilha - Vetores Mecnica-2011-1Schena94Aún no hay calificaciones
- 006 Seletivo Aluno SJR EDITAL #162020Documento72 páginas006 Seletivo Aluno SJR EDITAL #162020alvesyan683Aún no hay calificaciones
- Fontes de Ignicao PDFDocumento38 páginasFontes de Ignicao PDFJoào AlvesAún no hay calificaciones
- ELI DimensionamentoDocumento37 páginasELI Dimensionamentoscorpion-acmAún no hay calificaciones
- Iii 021Documento7 páginasIii 021Renata SilvaAún no hay calificaciones
- Inoxfluid - ConexõesDocumento36 páginasInoxfluid - ConexõesAdemilson Caetano100% (1)
- Plano Analítico de Didatica Geral (2022) - 013459Documento6 páginasPlano Analítico de Didatica Geral (2022) - 013459Silenio Elves SteelAún no hay calificaciones
- Metodologia Do Trabalho CientíficoDocumento4 páginasMetodologia Do Trabalho CientíficoLucas CostaAún no hay calificaciones
- Avaliação - 6º Ano - Préhistoria - ADocumento2 páginasAvaliação - 6º Ano - Préhistoria - AquerenaAún no hay calificaciones
- Resenha América IDocumento6 páginasResenha América Ilázaro_rufino_1Aún no hay calificaciones
- ExmyDocumento615 páginasExmymanuAún no hay calificaciones
- Apostila Detetive Particular 001Documento76 páginasApostila Detetive Particular 001Jhonny Wesker50% (2)
- Exercicios 1 - EndocrinologiaDocumento7 páginasExercicios 1 - EndocrinologiavelascofonsecaAún no hay calificaciones
- Teofilo Angelo Dias de SousaDocumento132 páginasTeofilo Angelo Dias de SousaTomas CostaAún no hay calificaciones