También podría gustarte
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- Quadratic Equation 1Documento29 páginasQuadratic Equation 1Athena Jane NapolisAún no hay calificaciones
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Lang Chapter 5Documento21 páginasLang Chapter 5Fakhir Shaheen100% (2)
- Binomial Theorem: Full Marks 50 Choose The Correct Option Q1. (A) - . (B) - . (C) - . Q2. Q3Documento1 páginaBinomial Theorem: Full Marks 50 Choose The Correct Option Q1. (A) - . (B) - . (C) - . Q2. Q3CHP TSTPSAún no hay calificaciones
- Mws Gen Inp TXT SplineDocumento12 páginasMws Gen Inp TXT SplineApuu Na Juak EhAún no hay calificaciones
- Untitled 2Documento75 páginasUntitled 2Kumari Ujwala SinhaAún no hay calificaciones
- Strassen's Matrix MultiplicationDocumento11 páginasStrassen's Matrix Multiplicationdogege3595Aún no hay calificaciones
- Physics 106: Mechanics: Wenda CaoDocumento26 páginasPhysics 106: Mechanics: Wenda Caosaeed al-zahraniAún no hay calificaciones
- Morse Homology 2010-2011Documento137 páginasMorse Homology 2010-2011Eric ParkerAún no hay calificaciones
- Guideline For Practical (March April 2020) 28-01-2020Documento122 páginasGuideline For Practical (March April 2020) 28-01-2020Ravikumar BalasubramanianAún no hay calificaciones
- Mae 1202: Aerospace Practicum: An Introduction To MATLAB: Part 1Documento46 páginasMae 1202: Aerospace Practicum: An Introduction To MATLAB: Part 1NiketGhelaniAún no hay calificaciones
- Fishers LDADocumento47 páginasFishers LDABinduAún no hay calificaciones
- DLL Math Grade8 Quarter1 Week1 (Palawan Division)Documento8 páginasDLL Math Grade8 Quarter1 Week1 (Palawan Division)Ami RAAún no hay calificaciones
- K To 12 MELC Mathematics JHSDocumento12 páginasK To 12 MELC Mathematics JHSV.G. Lopez AspirinAún no hay calificaciones
- Lecture Week 13a (Supplementary) : - Constrained OptimisationDocumento27 páginasLecture Week 13a (Supplementary) : - Constrained OptimisationdanAún no hay calificaciones
- Jee Maths Binomial Theorem TestDocumento5 páginasJee Maths Binomial Theorem Testmonikamonika74201Aún no hay calificaciones
- Global Kronecker Canonical FormDocumento17 páginasGlobal Kronecker Canonical FormFrancisco Javier Puerta CollAún no hay calificaciones
- NLC Math 8-EC-Lesson 6Documento15 páginasNLC Math 8-EC-Lesson 6RHEA JANE A PILLADOAún no hay calificaciones
- Class 8th Ncert Maths PDFDocumento8 páginasClass 8th Ncert Maths PDFSanjay BiradarAún no hay calificaciones
- Lecture 9 Introduction To Difference EquationsDocumento55 páginasLecture 9 Introduction To Difference EquationsMeselu TegenieAún no hay calificaciones
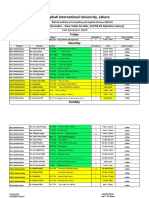
- Riphah International University, Lahore: Deparetment of Mathematics - Time Table For MSC, M.Phil, PH.D (Online Classes)Documento2 páginasRiphah International University, Lahore: Deparetment of Mathematics - Time Table For MSC, M.Phil, PH.D (Online Classes)Anam BilqeesAún no hay calificaciones
- January 2017 (IAL) MS - C12 EdexcelDocumento32 páginasJanuary 2017 (IAL) MS - C12 EdexcelNewton JohnAún no hay calificaciones
- Proving InequalitiesDocumento4 páginasProving InequalitieskukumaluXDAún no hay calificaciones
- Cad Cam 30 - 03 - 2021Documento14 páginasCad Cam 30 - 03 - 2021Bharat GavaliAún no hay calificaciones
- The Levenberg-Marquardt Algorithm For Nonlinear Least Squares Curve-Fitting ProblemsDocumento19 páginasThe Levenberg-Marquardt Algorithm For Nonlinear Least Squares Curve-Fitting ProblemsYoucef IslemAún no hay calificaciones
- Eigenvalues and EigenvectorsDocumento5 páginasEigenvalues and EigenvectorsMostafa Shameem RaihanAún no hay calificaciones
- Reversibility in Non-Commutative MechanicsDocumento13 páginasReversibility in Non-Commutative Mechanicsebb5Aún no hay calificaciones
- Basics of Polynomials: Coefficients, Degree, and Leading TermsDocumento6 páginasBasics of Polynomials: Coefficients, Degree, and Leading Termsr1u2Aún no hay calificaciones
- Quarter 2 Lesson 1 Illustrate Polynomial Functions Read Only1Documento22 páginasQuarter 2 Lesson 1 Illustrate Polynomial Functions Read Only1Ramil J. MerculioAún no hay calificaciones
- A Learning Resource Pack For Flexible Learning: SCHOOL YEAR 2020 - 2021Documento9 páginasA Learning Resource Pack For Flexible Learning: SCHOOL YEAR 2020 - 2021Andy D. CAún no hay calificaciones