También podría gustarte
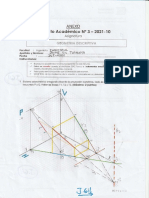
- Pa3 - Geometria - Jaime GilDocumento10 páginasPa3 - Geometria - Jaime GilJAIME IGOR GIL TUANAMA100% (2)
- Modelos y Espacios de ColorDocumento21 páginasModelos y Espacios de ColorIvonne sanchezAún no hay calificaciones
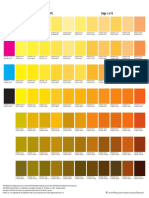
- PantoneDocumento15 páginasPantoneRICHARD GUERRA0% (1)
- Fusion de Imágenes Satelitales Arc GisDocumento21 páginasFusion de Imágenes Satelitales Arc Gisdanielic12Aún no hay calificaciones
- CUADERNO 5 Estimulación CognitivaDocumento16 páginasCUADERNO 5 Estimulación CognitivaDiana Luna GarcíaAún no hay calificaciones
- Ortóptica y Terapia VisualDocumento54 páginasOrtóptica y Terapia Visual05-TO-HU-CARI ELMA SALDAÑA BLANCOAún no hay calificaciones
- Camera RAWDocumento29 páginasCamera RAWgerardo cotaAún no hay calificaciones
- Medicina NuclearDocumento1 páginaMedicina NuclearqwertydayAún no hay calificaciones
- Linieamientos para La Entrega Del Proyecto Revit ADocumento3 páginasLinieamientos para La Entrega Del Proyecto Revit Asandro_rivera_8Aún no hay calificaciones
- Pensum Lic RadiologiaDocumento1 páginaPensum Lic RadiologiaAnderson Andu Aguilar GonzalezAún no hay calificaciones
- Resolución de La ImagenDocumento2 páginasResolución de La ImagenSanti Bobet HernándezAún no hay calificaciones
- Historia de La ImagenDocumento2 páginasHistoria de La ImagenDIANA NICOLE RAMIREZ RODRIGUEZAún no hay calificaciones
- Lab 9Documento5 páginasLab 9Bella MilkAún no hay calificaciones
- Etapa1 - Duban Delgadillo PDFDocumento15 páginasEtapa1 - Duban Delgadillo PDFDuban DelgadilloAún no hay calificaciones
- Procesamiento Digital de ImagenesDocumento9 páginasProcesamiento Digital de Imagenesfarliz100% (4)
- Color en OdontologíaDocumento23 páginasColor en OdontologíaLadis Yaneth Lopez LondoñoAún no hay calificaciones
- Actividad 2. Escalas de ColoresDocumento7 páginasActividad 2. Escalas de ColoresJose Angel Arroyo DuranAún no hay calificaciones
- 9CV11 AguayoJuarez Antonio Vision Computadora Practica 4 Modelos ColDocumento11 páginas9CV11 AguayoJuarez Antonio Vision Computadora Practica 4 Modelos ColAguayo Juarez AntonioAún no hay calificaciones
- Lista de Útiles Escolares 5ºDocumento1 páginaLista de Útiles Escolares 5ºCesar CubasAún no hay calificaciones
- Usos photoshopCCDocumento9 páginasUsos photoshopCCRaquel AntolínAún no hay calificaciones
- Wa0053.Documento16 páginasWa0053.sandraAún no hay calificaciones
- 3dsmax 2do Parcial ActividadesDocumento2 páginas3dsmax 2do Parcial ActividadesKarinaAún no hay calificaciones
- Fotografía DigitalDocumento5 páginasFotografía DigitalsarayhugoAún no hay calificaciones
- Respaldo Base de DatosDocumento84 páginasRespaldo Base de DatosRoberto AlvaradoAún no hay calificaciones
- FD-Terminologia y Partes de La CamaraDocumento18 páginasFD-Terminologia y Partes de La CamaraLast_BastardAún no hay calificaciones
- Sensores de ImagenDocumento16 páginasSensores de ImagenYvern TovarAún no hay calificaciones
- Libreria GeneralDocumento189 páginasLibreria GeneralVane MagallanesAún no hay calificaciones
- Axonométrico - Practicas-Lámina 02 E - UnlockedDocumento1 páginaAxonométrico - Practicas-Lámina 02 E - UnlockedManuel Menéndez AndrésAún no hay calificaciones
- Vision ArtificialDocumento71 páginasVision ArtificialDennis S RomeroAún no hay calificaciones
- UmbralizaciónDocumento4 páginasUmbralizaciónPaul Michael TafurAún no hay calificaciones