También podría gustarte
- Ma1505 CheatDocumento4 páginasMa1505 CheatSouseiseki ChromeAún no hay calificaciones
- Final Notes For AB and BCDocumento16 páginasFinal Notes For AB and BCsapabapjava2012Aún no hay calificaciones
- Data Structures and AlgorithmsDocumento30 páginasData Structures and AlgorithmsDavid Mihai60% (5)
- Calculus I Summary: Tabulated by Lambert Peng at Brown in Summer 2008Documento3 páginasCalculus I Summary: Tabulated by Lambert Peng at Brown in Summer 2008Thuy TienAún no hay calificaciones
- A-level Maths Revision: Cheeky Revision ShortcutsDe EverandA-level Maths Revision: Cheeky Revision ShortcutsCalificación: 3.5 de 5 estrellas3.5/5 (8)
- Rotor-Earth-Fault ProtectionDocumento26 páginasRotor-Earth-Fault ProtectionSaghir Ahmad100% (1)
- CUSUM ChartDocumento23 páginasCUSUM ChartSaurabh Jain0% (1)
- Deep Learning Fake NewsDocumento77 páginasDeep Learning Fake Newshawariya abelAún no hay calificaciones
- Problems: Log (Q) VS TDocumento8 páginasProblems: Log (Q) VS TDianita ZuamaAún no hay calificaciones
- MATH1010 University Mathematics Supplementary ExerciseDocumento24 páginasMATH1010 University Mathematics Supplementary ExercisepklfpklfAún no hay calificaciones
- Risky Bonds and CDS Valuation in PythonDocumento10 páginasRisky Bonds and CDS Valuation in Pythontheodor_munteanuAún no hay calificaciones
- Calculus Cheat Sheet Integrals ReducedDocumento3 páginasCalculus Cheat Sheet Integrals ReducedFadzilah YayaAún no hay calificaciones
- Power System Analysis - Stevenson - Grainger - AnnexDocumento5 páginasPower System Analysis - Stevenson - Grainger - AnnexSaghir AhmadAún no hay calificaciones
- Notes On Metric Spaces 0Documento18 páginasNotes On Metric Spaces 0GAurav JOshiAún no hay calificaciones
- 08review Nonlin Intro PDFDocumento7 páginas08review Nonlin Intro PDFSaghir AhmadAún no hay calificaciones
- Nonlinear OptimizationDocumento6 páginasNonlinear OptimizationKibria PrangonAún no hay calificaciones
- AssigmentsDocumento12 páginasAssigmentsShakuntala Khamesra100% (1)
- Tutorial 1 Fundamentals: Review of Derivatives, Gradients and HessiansDocumento25 páginasTutorial 1 Fundamentals: Review of Derivatives, Gradients and Hessiansrashed44Aún no hay calificaciones
- Improper Integral1Documento25 páginasImproper Integral1Lev DunAún no hay calificaciones
- Convex Optimization For Machine LearningDocumento110 páginasConvex Optimization For Machine LearningratnadeepbimtacAún no hay calificaciones
- Convex OptimizationDocumento152 páginasConvex OptimizationnudalaAún no hay calificaciones
- CPSC 542f NotesDocumento10 páginasCPSC 542f NotesSofia VegaAún no hay calificaciones
- CPSC 542F WINTER 2017: Lecture NotesDocumento10 páginasCPSC 542F WINTER 2017: Lecture NotesArif HermawanAún no hay calificaciones
- HW1 Cmo 2019 XDocumento5 páginasHW1 Cmo 2019 XAhmad ArefeenAún no hay calificaciones
- 06 Subgradients ScribedDocumento5 páginas06 Subgradients ScribedFaragAún no hay calificaciones
- Orthogonal BasisDocumento30 páginasOrthogonal BasisApel_Apel_KingAún no hay calificaciones
- Class 20220818Documento19 páginasClass 20220818Sahil KambleAún no hay calificaciones
- IITG MA101 Endsem Question PaperDocumento12 páginasIITG MA101 Endsem Question PaperNarravula Harshavardhan100% (2)
- Wright SlidesDocumento232 páginasWright SlidesKun DengAún no hay calificaciones
- Rumus Matematika Sma InterDocumento19 páginasRumus Matematika Sma InterAde JayusAún no hay calificaciones
- 10-725/36-725 Optimization Midterm Exam: NameDocumento10 páginas10-725/36-725 Optimization Midterm Exam: NamehassanAún no hay calificaciones
- Chapter 12 Mm34casDocumento16 páginasChapter 12 Mm34casEric MoralesAún no hay calificaciones
- Problem Set 1: January 7, 2014Documento9 páginasProblem Set 1: January 7, 2014VishnuVardhanAún no hay calificaciones
- Calculus Review and Formulas: 1 FunctionsDocumento11 páginasCalculus Review and Formulas: 1 FunctionsRaymond BalladAún no hay calificaciones
- Convex Functions: September 2, 2008Documento21 páginasConvex Functions: September 2, 2008Tôm SúAún no hay calificaciones
- Master Qfin at Wu Vienna Lecture Optimization: R Udiger FreyDocumento28 páginasMaster Qfin at Wu Vienna Lecture Optimization: R Udiger FreyBruno GasperovAún no hay calificaciones
- Integration: FXDX FX C S X X N FX Ix X NDocumento3 páginasIntegration: FXDX FX C S X X N FX Ix X NSalvadora1Aún no hay calificaciones
- BV Cvxbook Extra Exercises2Documento175 páginasBV Cvxbook Extra Exercises2Morokot AngelaAún no hay calificaciones
- Relations and Functions Class XIDocumento5 páginasRelations and Functions Class XIUdyamGAún no hay calificaciones
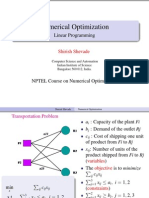
- LinearProgramming IDocumento49 páginasLinearProgramming IlincolAún no hay calificaciones
- BV Cvxbook Extra ExercisesDocumento165 páginasBV Cvxbook Extra ExercisesscatterwalkerAún no hay calificaciones
- 12 Standard NotesDocumento9 páginas12 Standard NotesHarshal AgrawalAún no hay calificaciones
- 1 Mathematical Preliminaries 2Documento17 páginas1 Mathematical Preliminaries 2shubhamAún no hay calificaciones
- Continuous OptimizationDocumento51 páginasContinuous Optimizationlaphv494Aún no hay calificaciones
- Homework 6Documento3 páginasHomework 6Ishika KulkarniAún no hay calificaciones
- 11.10 Taylor SeriesDocumento6 páginas11.10 Taylor SeriesMadiha KhanAún no hay calificaciones
- Chapter - 2 - Convex FunctionDocumento32 páginasChapter - 2 - Convex FunctionHong KimmengAún no hay calificaciones
- Optimization Lectures Formal NoteDocumento9 páginasOptimization Lectures Formal NoteDebdas GhoshAún no hay calificaciones
- On the difference π (x) − li (x) : Christine LeeDocumento41 páginasOn the difference π (x) − li (x) : Christine LeeKhokon GayenAún no hay calificaciones
- RA Tut 1 (Edited) - 2022-23Documento4 páginasRA Tut 1 (Edited) - 2022-23Priyajit DebnathAún no hay calificaciones
- 03 Convex FunctionsDocumento31 páginas03 Convex FunctionsMrutyunjaya MeherAún no hay calificaciones
- Lectures 1141Documento314 páginasLectures 1141BoredAún no hay calificaciones
- BV Cvxbook Extra ExercisesDocumento187 páginasBV Cvxbook Extra ExercisesMorokot AngelaAún no hay calificaciones
- Real Analysis 17uma5c10-1Documento16 páginasReal Analysis 17uma5c10-1KarthiAún no hay calificaciones
- Riemann IntegrationDocumento5 páginasRiemann Integrationap021Aún no hay calificaciones
- 8 DefiniteintegralsDocumento55 páginas8 Definiteintegralshoangngocphanduy187Aún no hay calificaciones
- (Laurent Lessard) Convex ProgrammingDocumento24 páginas(Laurent Lessard) Convex ProgrammingLeonardo Gama AssumpçãoAún no hay calificaciones
- A New Semismooth Newton Method For Ncps Based On The Penalized KK FunctionDocumento18 páginasA New Semismooth Newton Method For Ncps Based On The Penalized KK FunctionMaduro Hugo RamomAún no hay calificaciones
- Fixed-Point Partial Recursion in Coq: Joint Work With Yves BertotDocumento32 páginasFixed-Point Partial Recursion in Coq: Joint Work With Yves Bertotwicko3Aún no hay calificaciones
- MECOM093Documento17 páginasMECOM093Jose RissoAún no hay calificaciones
- Top LectureDocumento15 páginasTop LecturemymymymyAún no hay calificaciones
- Lecture 2Documento19 páginasLecture 2Jaco GreeffAún no hay calificaciones
- W5 IntegrationDocumento37 páginasW5 IntegrationYuri ParkAún no hay calificaciones
- Assignment1 SolutionsDocumento7 páginasAssignment1 SolutionsZiaAún no hay calificaciones
- Differentiation and It's ApplicationDocumento7 páginasDifferentiation and It's ApplicationKirti Ranjan SahooAún no hay calificaciones
- Electric Power Distribution.2.0Documento5 páginasElectric Power Distribution.2.0Saghir AhmadAún no hay calificaciones
- Role of HVDC and FACTS in Future Power SystemsDocumento20 páginasRole of HVDC and FACTS in Future Power SystemsSaghir AhmadAún no hay calificaciones
- The Electric CurrentDocumento5 páginasThe Electric CurrentSaghir AhmadAún no hay calificaciones
- Nature of Mathematics FinalDocumento4 páginasNature of Mathematics FinalDennis ZamoraAún no hay calificaciones
- 2011 KGSP University Information EnglishDocumento246 páginas2011 KGSP University Information EnglishAlvin ReyesAún no hay calificaciones
- Zarandi, MHF, Alaeddini, A I. and Turksen, BDocumento11 páginasZarandi, MHF, Alaeddini, A I. and Turksen, BDr Abhijeet GangulyAún no hay calificaciones
- Stochastic Models: Dr. Olivia MoradDocumento15 páginasStochastic Models: Dr. Olivia Moradmod nodAún no hay calificaciones
- ML Unit1Documento25 páginasML Unit1Jaya durkaAún no hay calificaciones
- Summary of The Types of FlipDocumento2 páginasSummary of The Types of Flipgannoju42350% (2)
- Converting A Normal Random Variable: Ask QuestionDocumento4 páginasConverting A Normal Random Variable: Ask QuestionGLADY VIDALAún no hay calificaciones
- Computer-Aided EngineeringDocumento7 páginasComputer-Aided EngineeringsushamaAún no hay calificaciones
- CW 2019 00026Documento8 páginasCW 2019 00026Bien Pham HuuAún no hay calificaciones
- CSD 205 - Design and Analysis of Algorithms: Instructor: Dr. M. Hasan Jamal Lecture# 01: IntroductionDocumento101 páginasCSD 205 - Design and Analysis of Algorithms: Instructor: Dr. M. Hasan Jamal Lecture# 01: IntroductionAbdul Sanaullah100% (1)
- Evidence-Based Sports Medicine To Prevent Knee Joint Injury in Triple JumpDocumento4 páginasEvidence-Based Sports Medicine To Prevent Knee Joint Injury in Triple JumpValeska PalapeAún no hay calificaciones
- 329 Lect 07Documento10 páginas329 Lect 07des tosAún no hay calificaciones
- Boyce ODEch 6 S 2 P 17Documento2 páginasBoyce ODEch 6 S 2 P 17Lucas DanielAún no hay calificaciones
- QABD Group AssignmentDocumento4 páginasQABD Group Assignmenttinsaefaji900Aún no hay calificaciones
- Lecture 03 OdEDocumento58 páginasLecture 03 OdEcuntnaszerAún no hay calificaciones
- Support Vector MachinesDocumento16 páginasSupport Vector MachinesNaresha aAún no hay calificaciones
- Essay 'Importance of Mathematics in The Modern World'Documento1 páginaEssay 'Importance of Mathematics in The Modern World'Sevilla Ernestdon100% (1)
- ATT13 IeconDocumento6 páginasATT13 IeconJohn ArvanitakisAún no hay calificaciones
- X and R Charts: Seminar OnDocumento17 páginasX and R Charts: Seminar OnDang Anh DuyAún no hay calificaciones
- Riscv Crypto Spec v0.9.0 ScalarDocumento52 páginasRiscv Crypto Spec v0.9.0 ScalarJohanAún no hay calificaciones
- Yang-Mills Instantons and The S-Matrix (1979)Documento19 páginasYang-Mills Instantons and The S-Matrix (1979)oldmanbearsAún no hay calificaciones
- Lecture 08-Gauss-EleminationDocumento55 páginasLecture 08-Gauss-EleminationMaria Anndrea MendozaAún no hay calificaciones
- The LMI Control ToolboxDocumento4 páginasThe LMI Control ToolboxdvnccbmacbtAún no hay calificaciones
- 108 Emergency Ambulance ServicesDocumento5 páginas108 Emergency Ambulance ServicesKartik Hinsoriya100% (1)
- B.N.N College, Bhiwandi Department of Information Technology Subject: Business Intelligence Questions BankDocumento49 páginasB.N.N College, Bhiwandi Department of Information Technology Subject: Business Intelligence Questions BankYohan MalshikaAún no hay calificaciones