También podría gustarte
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- AIR Modeller 75 2017-12-20 - 01Documento68 páginasAIR Modeller 75 2017-12-20 - 01JoãoGilbertoAraújoPontes100% (4)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- 15.12 - Water Supply Design V2Documento33 páginas15.12 - Water Supply Design V2saifulAún no hay calificaciones
- Chapter 4-EDocumento42 páginasChapter 4-EMahrouz MadoAún no hay calificaciones
- Compatibility and SuperpositionDocumento14 páginasCompatibility and SuperpositionSoumen DebnathAún no hay calificaciones
- Navy Blast Resistant StructuresDocumento358 páginasNavy Blast Resistant StructuresjakejohnsAún no hay calificaciones
- Navy Blast Resistant StructuresDocumento358 páginasNavy Blast Resistant StructuresjakejohnsAún no hay calificaciones
- Navy Blast Resistant StructuresDocumento358 páginasNavy Blast Resistant StructuresjakejohnsAún no hay calificaciones
- Urban Drainage Design ManualDocumento478 páginasUrban Drainage Design Manualjomy_pj8106100% (2)
- Urban Drainage Design ManualDocumento478 páginasUrban Drainage Design Manualjomy_pj8106100% (2)
- AutoCAD Civil 3D 2010Documento780 páginasAutoCAD Civil 3D 2010rasanchezc1984100% (4)
- AutoCAD Civil 3D 2010Documento780 páginasAutoCAD Civil 3D 2010rasanchezc1984100% (4)
- Quick Union Reference Tables: Pressure Control EquipmentDocumento1 páginaQuick Union Reference Tables: Pressure Control EquipmentMiguel FAún no hay calificaciones
- Tutorial ETABSDocumento60 páginasTutorial ETABSValentin VrabieAún no hay calificaciones
- Grouting in Rock TunnellingDocumento161 páginasGrouting in Rock TunnellingOanaAún no hay calificaciones
- Standard For Safety UL ADocumento49 páginasStandard For Safety UL ANhất NgônAún no hay calificaciones
- Strategic Supply Chain Management and LogisticsDocumento16 páginasStrategic Supply Chain Management and LogisticsNalaka Manawadu67% (3)
- YaskawaDocumento375 páginasYaskawaCristian IozsaAún no hay calificaciones
- Metodo Kiyoshi MutoDocumento18 páginasMetodo Kiyoshi MutoJorge E. Quispe SandovalAún no hay calificaciones
- HEC-HMS QuickStart Guide 4.3Documento61 páginasHEC-HMS QuickStart Guide 4.3HerrHLAún no hay calificaciones
- A Formulation of General Shell Elements The Use of Mixed Interpolation of Tensorial ComponentsDocumento26 páginasA Formulation of General Shell Elements The Use of Mixed Interpolation of Tensorial ComponentssaifulAún no hay calificaciones
- EM2004Documento8 páginasEM2004saifulAún no hay calificaciones
- (1981) Wind Induced Torsional Loads On StructuresDocumento2 páginas(1981) Wind Induced Torsional Loads On StructuressaifulAún no hay calificaciones
- 18986Documento25 páginas18986saifulAún no hay calificaciones
- Code of Practice For The Structural Use of Steel (2005)Documento377 páginasCode of Practice For The Structural Use of Steel (2005)Gary Lam100% (1)
- BATHE On Finite Element Methods For Nonlinear Dynamic ResponseDocumento20 páginasBATHE On Finite Element Methods For Nonlinear Dynamic Responsetco3635Aún no hay calificaciones
- SPTDocumento7 páginasSPTمحمد فيذولAún no hay calificaciones
- Design of Pile Foundations in Liquefiable SoilsDocumento233 páginasDesign of Pile Foundations in Liquefiable SoilssaifulAún no hay calificaciones
- Basis of Structural Analysis 0910Documento34 páginasBasis of Structural Analysis 0910saifulAún no hay calificaciones
- 05 GB Simple ConnectionsDocumento11 páginas05 GB Simple Connectionspjustino70Aún no hay calificaciones
- Fema Flood MitigationDocumento48 páginasFema Flood MitigationsaifulAún no hay calificaciones
- Multiple-Choice QuestionsDocumento8 páginasMultiple-Choice Questionsvijayganesh pinisettiAún no hay calificaciones
- User's Guide: BondekDocumento8 páginasUser's Guide: BondekMing ChongAún no hay calificaciones
- PRJCTDocumento10 páginasPRJCTrpkn541Aún no hay calificaciones
- Gilding Manual PDFDocumento14 páginasGilding Manual PDFIva VazAún no hay calificaciones
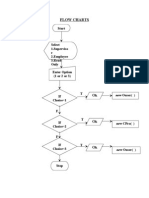
- Flow Charts Option: StartDocumento13 páginasFlow Charts Option: StartbalabooksAún no hay calificaciones
- International Log Building StandardsDocumento19 páginasInternational Log Building Standardsursind100% (1)
- 07 AlarmManagement enDocumento39 páginas07 AlarmManagement enLuis RodriguezAún no hay calificaciones
- T REC K.Sup16 201905 I!!PDF E PDFDocumento24 páginasT REC K.Sup16 201905 I!!PDF E PDFMark LionAún no hay calificaciones
- Ma-Mscmt-10 J16Documento5 páginasMa-Mscmt-10 J16Dilip BhatiAún no hay calificaciones
- Subnetting PracticeDocumento5 páginasSubnetting PracticeUncleSamAún no hay calificaciones
- Aerial Robotics Lecture 1B - 5 Agility and ManoeuvrabilityDocumento4 páginasAerial Robotics Lecture 1B - 5 Agility and ManoeuvrabilityIain McCulloch100% (1)
- Zw3d2022 Lite Vs Cadbro 2022Documento4 páginasZw3d2022 Lite Vs Cadbro 2022Carlos LimaAún no hay calificaciones
- PactFocus Report - Sample - LPGDocumento27 páginasPactFocus Report - Sample - LPGIqbal HussainAún no hay calificaciones
- Narayana 10 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 12n Key&sDocumento10 páginasNarayana 10 01 24 SR Star Co Scmodel A, B&C Jee Main GTM 12n Key&sReddyAún no hay calificaciones
- Sennheiser MD 441Documento2 páginasSennheiser MD 441ndujaAún no hay calificaciones
- High Voltage Grease Reduces Wear and ArcingDocumento2 páginasHigh Voltage Grease Reduces Wear and ArcingtlnferreiraAún no hay calificaciones
- P613 HW # 2 Solutions for a 2D Electron GasDocumento4 páginasP613 HW # 2 Solutions for a 2D Electron GasRakeshAún no hay calificaciones
- Premium Swab Rigs Since 1925Documento8 páginasPremium Swab Rigs Since 1925fabricio3fabricio-1Aún no hay calificaciones
- Seedburo Germinator Controls and Monitoring InstrumentsDocumento2 páginasSeedburo Germinator Controls and Monitoring InstrumentsJhony Rengifo SolsolAún no hay calificaciones
- Zimbabwe Engineer ITDG Small Scale Production of Fired Clay BricksDocumento8 páginasZimbabwe Engineer ITDG Small Scale Production of Fired Clay BricksdkataleAún no hay calificaciones
- c600 17lookinsideDocumento6 páginasc600 17lookinsideИван МинчевAún no hay calificaciones
- Theory of Metal Cutting-Module 1Documento116 páginasTheory of Metal Cutting-Module 1rejeesh_rajendranAún no hay calificaciones
- Dokumen - Tips Carte Ford C Max 2007Documento278 páginasDokumen - Tips Carte Ford C Max 2007Rostás MiklósAún no hay calificaciones